PitLab FPV System: OSD+Autopilot+Ground station

если честно я не могу сравнивать реально, это моя первая система, но я очень много читал и читаю сейчас про другие системы…
на данный момент у меня нет нареканий на систему PitLab, система прекрасна, автор очень отзывчив, идёт на контакт, доделывает какие то фишечки если они действительно нужны…
FY41 даже рядом не лежала… тут точно сомнений нет, у друга такая…
инфа на наземку закодирована в видеосигнале.
по звуку идёт сигнал от встроенного вариометра
по звуку идёт сигнал от встроенного вариометра
А если в этом нет необходимости, надеюсь, туда можно пустить сигнал от бортового микрофона?
А если в этом нет необходимости, надеюсь, туда можно пустить сигнал от бортового микрофона?
не задавался такой целью, нужно спросить у разраба.
Сегодня испытал радость полёта по приборам в нулевой видимости… вчера подстраивал фокус объектива и плохо закрутил контргайку, в полёте она начала откручиваться и вскоре вообще открутилась. Повезло, что не попала в винт. Долетел нормально до базы и потом только подумал почему я возврат домой просто не включил. Как же всё таки сладко звучит звук пропеллера возвращаевшиго домой самолёта. По направлению антенны наземки быстро нашёл силуэт. Плохо только, что попал конденсат на матрицу камеры, сейчас сохнет, вытирать боюсь только разводы оставить.
А если в этом нет необходимости, надеюсь, туда можно пустить сигнал от бортового микрофона?
Никто не запрещает пустить сигнал микрофона напрямую в передатчик, а выход звука с платы ОСД оставить не подключённым.
В очередной раз решил поподробнее разобраться с этой системой, т.к. зелени на Зелёного зелёный зверь не даёт…
Возникли вопросы. Всё по порядку:
Скачал и запустил “FPV_manager software 2.20”.
Файла-описания этой программы нет, очевидно считается, что там всё интуитивно понятно. Спорить не буду, то, что есть, выглядит вполне понятным и при подключении железа проблем скорее всего не возникнет, но описание не помешало бы.
Ладно, будем разбираться. Пока к программе не подключено железо, часть полей пустые и недоступные. Это понятно. Но почему-то закладок в программе маловато. Они что, тоже появятся при подключении автопилота к компьютеру?
Что не нашел - не нашел настройки собственно автопилота в плане скоростей, высот, углов, уровней газа, магнитометра, GPS и т.п., тех, что описаны в Autopilot user’s manual. Это что, всё делается только через OSD?!? Почему? Красивая программа, по какой причине в неё не добавлены закладки для этих настроек? Даже путевые точки можно задать прямо по карте (только почему-то на закладке OSD, а не Autopilot), а скорости и коридоры нет.
Тогда другой вопрос: Не нашел инструкции со скриншотами всех настроечных экранов OSD. Есть только несколько видеороликов на сайте, где по этим экранам скачут. Для ознакомления этого наверное хватит, для изучения явно мало.
Не хочется сначала купить железяку, а потом живьём изучать возможности её настроек и удобство этих настроек. По русски это называется “купить кота в мешке”. Здесь мешок не завязан, но в его тёмные углы существующая документация заглянуть явно не даёт…
Поправьте меня, если я не прав.
Автор проекта поляк, даже та документация которая есть кривовато переведена на англ язык, я уже не говорю про русский…
Однако уверяю вас, не стоит бояться… Да, некоторые моменты не освещены в документации, но они интуитивно понятны.
Некоторые настройки делаются через FPV_manager, но основная часть всё через OSD, в дальнейшем автор планирует расширить возможности менеджера. Этот тоже не должно пугать, я как однажды настроил через OSD теперь и не заглядываю туда… Сам лично делал перевод OSD, так что думаю вы разберётесь, не всё так сложно как кажется…
при подключении железа к компу новых пунктов не появится…, путевые точки можно задавать прямо из менеджера и потом заливать их в железо.
Опять же, все настройки и облёт летательного аппарата делаются в поле, с постоянными тестовыми взлётами и посадками, вся прелесть в том что поправить любой пункт можно именно через OSD! Взлетел, попробовал, если что то не так, тут же поправил без дополнительных ноутбуков и прочего…
Автор очень отзывчив на вопросы и адекватные просьбы пользователей, при моём начальном знании англ языка я прекрасно общаюсь с ним на форуме rcgroups через гугл
Не стоит думать что если в программе управления автопилотом очень много настроек то она круче остальных, совсем наоборот, мне очень нравится что все термины в настройках Pitlab понятны и прозрачны, нет дибиловатых Pid и прочего что может вводить в заблуждение…
Выбирать конечно вам, но я бы очень советовал, я купил и сейчас очень благодарен человеку, который отговорил меня от той же 41 фишки…
Сергей, спасибо за оперативные ответы. Английский меня не пугает, несколько настораживает непопуляность этого автопилота в России - эта ветка имеет всего 3 страницы за более чем год.
Т.е. я правильно понял - посмотреть на все настроечные экраны OSD можно только после покупки? Документа, где они все были бы выложены и описаны не существует? Хотелось бы услышать ответ автора, но он в этой ветке же пол года не появляется… Пойду читать и спрашивать на rcgroups.
если есть необходимость могу попробовать выложить скрины, да и вообще чем смогу - помогу
да, некоторая не популярность этого изделия есть, но она не от того, что он плохой, просто не распространён… именно по этому автору и нет смысла тут маячить…
я использую и автопилот, OSD, наземку, поворотную платформу, пока только восторг!
Ещё вопрос: Т.к. “EagleTree Airspeed MicroSensor V3” для этой OSD является сторонним внешним датчиком, нужна ли ему в составе OSD какая-то дополнительная калибровка? Или он сразу из коробки будет передавать в OSD по i2c правильную скорость?
Ещё вопрос: Т.к. “EagleTree Airspeed MicroSensor V3” для этой OSD является сторонним внешним датчиком, нужна ли ему в составе OSD какая-то дополнительная калибровка? Или он сразу из коробки будет передавать в OSD по i2c правильную скорость?
сразу из коробки
при каждом включении этот датчик сам калибруется средствами программного обеспечения автопилота
Ещё, на всех скриншотах OSD со строкой настройки GPS, которые я видел, стоит цифра 5 Гц. Это что, производитель комплектует все свои изделия не 10-ти, а 5-ти герцовыми датчиками? Зачем и почему? Если датчик GPS/GLONASS тоже 5-то герцовый, я буду очень разочарован…
GPS прекрасно работает, без задержек и прочего…
могу выложить кусочек видео если нужно
датчик GPS работает на частоте 5 герц (у меня такой и проблем я не вижу никаких…)
совмещённый GPS-GLONAS может работать на частоте 10 герц(не знаю с какой частотой реально опрашивается при подключении), купите себе такой если есть сомнения
Честно говоря не вижу разницы между 5 и 10 герцами, с одной стороны да, в два раза быстрее, с другой, куда такая скорость? выводить на экран, принимать решение о направлении полёта? мне кажется даже 5 герц в этом случае избыточно…
попробуйте сами объяснить причину своего разочарования, в чём реальная польза?
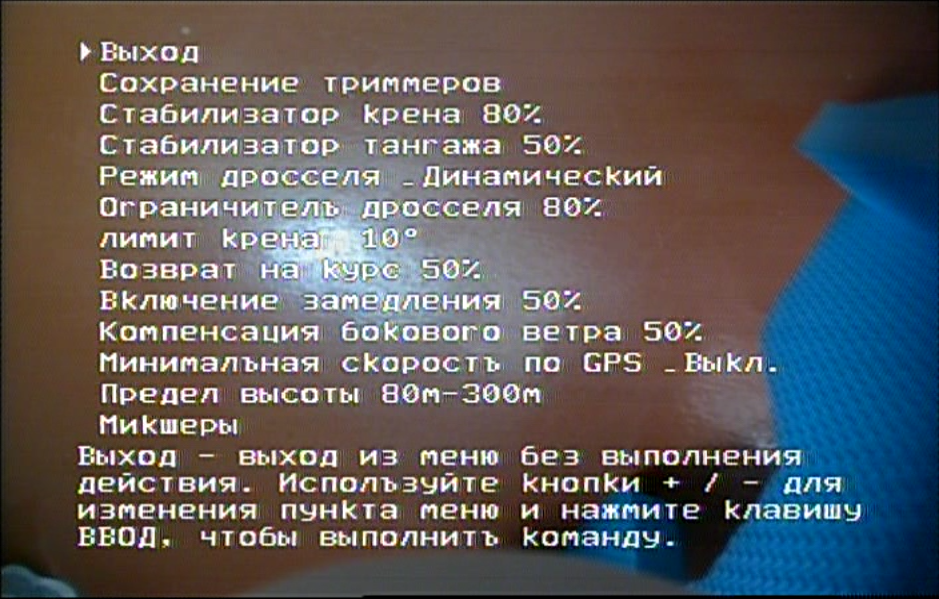
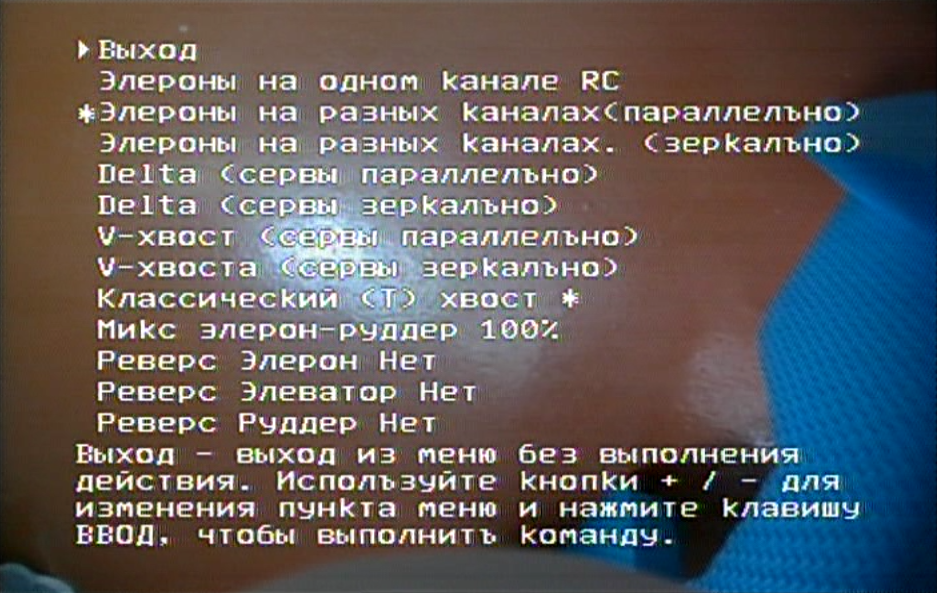
вот вам несколько скринов настроек

Сам лично делал перевод OSD
Сергей, Вы только переводили текст, а файл russian.txt делал разработчик или Вы же генерировали и файл? Чем? Изначальный “перевод”, можно сказать, вообще отсутствует. Ваш - это уже шаг далеко вперёд, но буква “ять” очень режет глаз, да и фразы типа “Yсkорение сkорости” тоже, хотелось бы и его немного подправить для себя. Конвертнул hex в bin, уже кое-что читается, но какая-то тулза для его правки всё же нужна.
мне разраб дал файлик Excel, там есть все пункты (правда это было на пару версий прошивки “назад”), который на выходе генерит файл russian.txt для заливки в прошивку
Я думаю не получится подправить например указанное вами “Yсkорение сkорости” так как скорее всего автор использует шрифты зашитые в OSD, а файл russian.txt это только инструкции что выводить на экран…
а вообще, по делу, русификация нафиг не нужна, баловство всё это, и без неё всё более чем понятно
если файл генератор нужен пишите в личку
Пошарился по знакогенератору OSD. К сожадению в нём не удалось найти начертания символов “Б”, “У”, “у”, “Ь”, “ь”, “к”, котрые так режут глаз на экране. Зато нашлись неиспользуемые автором, но имеющиеся в прошивке начертания символов “Г”, “Ж”, “Л”, “Ф”, “Ц”, “Ч”, “Ш”, “Щ”, “Ъ”, “Ю”, “ё” (вместо заглавных букв в оригинале используются строчные). Подправил таблицу перекодировки, чтобы они тоже не зря болтались. Во вложении файл русского языка russian.zip от Сергея (отличие от того, что лежит на сайте только в одной строчке, какой, не знаю обратной декомпиляции нет, а пересматривать всё не стал) с подправленной таблицей перекодировки для использования свеженайденных символов. Кому надо, берите.
Отдельно переписал для себя экранные тексты OSD на свой скромный вкус (файл russian(vadim_k).zip). Мне так больше нравится. Если кому тоже понравится - берите, пользуйтесь.
Правда, из-за технических накладок не удалось руссифицировать один пункт меню - “Use throttle trim (Store idle throttle position for gas engine)”. Он так и остался на английском языке.
Теперь вопросы:
Не нашёл, где в OSD находится пункт “Минимальная скорость полета (Поддерживание минимальной скорость полета для избегания срыва самолета.)”, который есть в файле с тексовыми сообщениями. Или плохо искал, или это из-за того, что у меня датчик воздушной скорости пока не подключен (ещё в пути).
И ещё, где задаётся или меняется “имя пилота”? То, что по умолчанию отображается на экране слева вверху под уровнем RSSI и на раскладке экрана в FPV_manager’е называется, если я правильно понял, называется словом “SQ5OMP”.
Минимальная скорость срыва будет когда подключите датчик воздушки.
Имя пилота правится из FPV менеджера, на вскидку не помню, на работе трафика мало и менеджера нет, но по-моему вы всё правильно описали, именно это поле
имя пилота в настройках OSD поле “Callsign”
После сборки второго Х8, обнаружил помеху на приёмник ЛРС 433МГц от автопилота. Ради прикола, если поднести антенну вплотную к автопилоту, то рсси показывает 100% приёма 😉 . Приёмник находится на конце крыла, 1 метр от автопилота и 2 метра от видео передатчика.
Но помехи пёрли по ппм кабелю между автопилотом и приёмником, а так же от сервы, провода которой подключались к автопилоту и были проложены вместе с проводами ппм.
Фееритовые кольца особо не помогали. Связался с разработчиками Питлаба, с товарищем Zbig c rcgroup. Он посоветовал впаять индуктивности 4.7МГ в каждый проводок, всего 5 штук: земля на серву и ппм, сигнальный сервы и ппм и питание сервы.
Накрутил 5 индуктивностей по просчёту из проги coil32. Крутил медным проводком 0.25мм из поломоного моторчика. Внутренний диаметр 3.5мм, ~20 витков.
В итоге наводки победил))
Сами помехи увидел опираясь на рсси РУ приёмника. Помехи были на 40% от максимума, теперь всё ок.
странно это, у меня приёмник на Скае расположен в 10 сантиметрах от АП и ОСД, ещё в 20 сантиметрах передатчик видео, таких проблем не замечаю. То ли сервы у вас какие тухлые, то ли ещё что то…
Помехи наводились и без серв… какая у вас система управления? У меня РЛС от Томаса (TLRS), ловит полную “связь” если поднести антенну вплотную…
у меня LRS от эксперта… однотипное на 433…