Mini Skywalker #2

В продолжение старой темы “Mini Skywaker EPO”.
Как достижение прошлого сезона - собран идеальный FPV самолет на основе Mini Skywalker и APM2. Не такой уж идеальный, конечно 😒 Но результатом доволен.
Постараюсь изложить основные идеи конструкции в картинках.
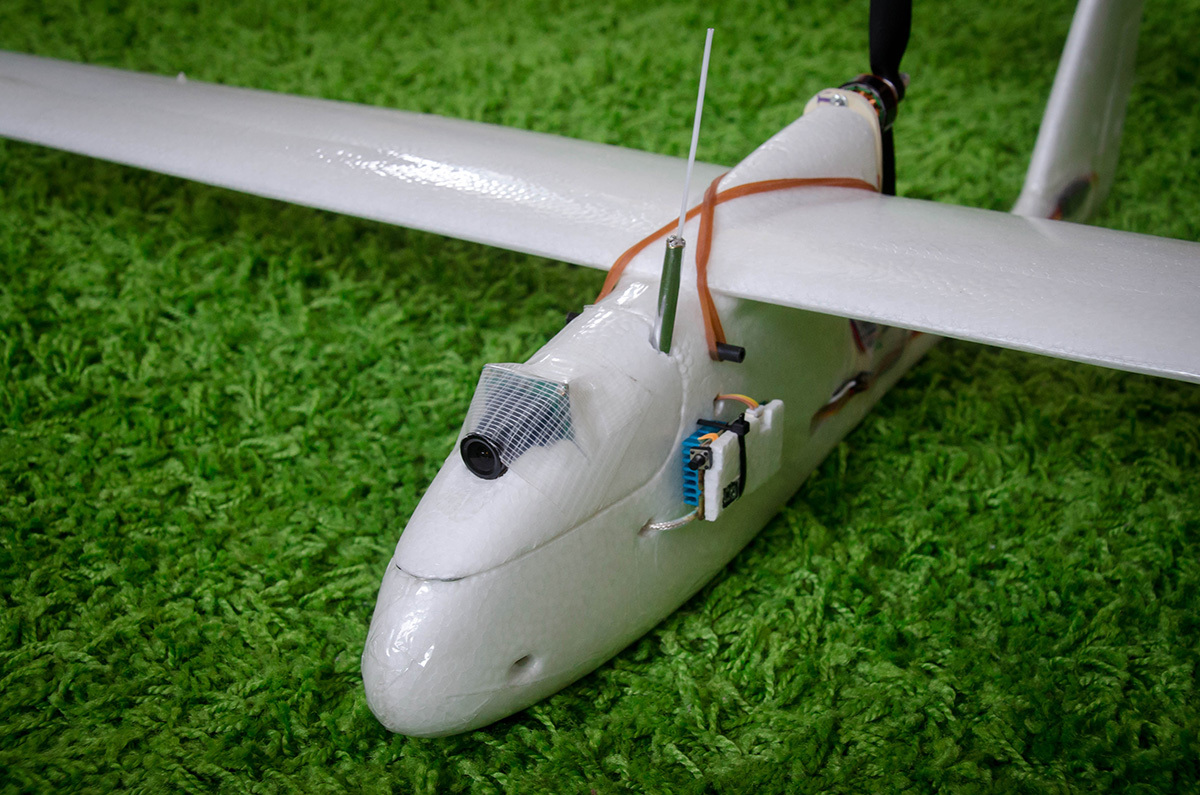
Платформа из фанеры. На эту платформу и потрачено больше всего времени. На ней камера MC900D-V9 на поворотно-наклонном креплении. Под верхней палубой спрятан GPS и Minim OSD.
Вид сверху. Приемник frsky L9R, антенны по бокам фюзеляжа.
Крепление горизонтального стабилизатора. Вклеена фанерка, в ней дырки, в дырках гайки. Стабилизатор крепится через карбоновую накладку винтами M2.
С другой стороны винты. Это такая хитрая выдумка. В фюзеляж вклеены пластиковые трубки на которые опирается плата APM2. Отверстия в плате уменьшены с помощью эпоксидки и в них нарезана резьба M3.
На платформе с этой стороны видно USB-порт и GPS/GLONASS модуль. Кстати, не очень удачное расположение GPS - слишком близко к другой электронике и много помех. Но так тоже работает. На фоне воздушный шарик, чтобы оно летало. А то как иначе полетит без крыльев и мотора.
Продолжение следует.
Титаник 😃
Кирилл, сколько же он весит, измеряли?
Без батарейки ровно 300 грамм. 105 крыло с мотором, 10 стабилизатор, 185 фюзеляж (как на фото).
Батарейки 3s:
850 - 75 грамм
1300 - 96 грамм - это облегченный вариант с укороченными проводами.
С маленькой батарейкой еще дополнительную камеру цеплял (мёбуиус, где-то 45 грамм).
При полном весе 400г он у меня даже вверх пузом летал. Плоховато, но летал.
а где видео с борта ?
Параметры ArduPlane/APM2 версия 3.0.3. Не самый последний вариант, но в настройках PID отличий быть не должно.
Вот, нужная тема!
Я за день до создания этой писал в дневнике о постройке своего, наверное нет смысла дублировать тут, просто приложу немного фото да комплект.
Аккум: Zippy Compact 1000mah 3S
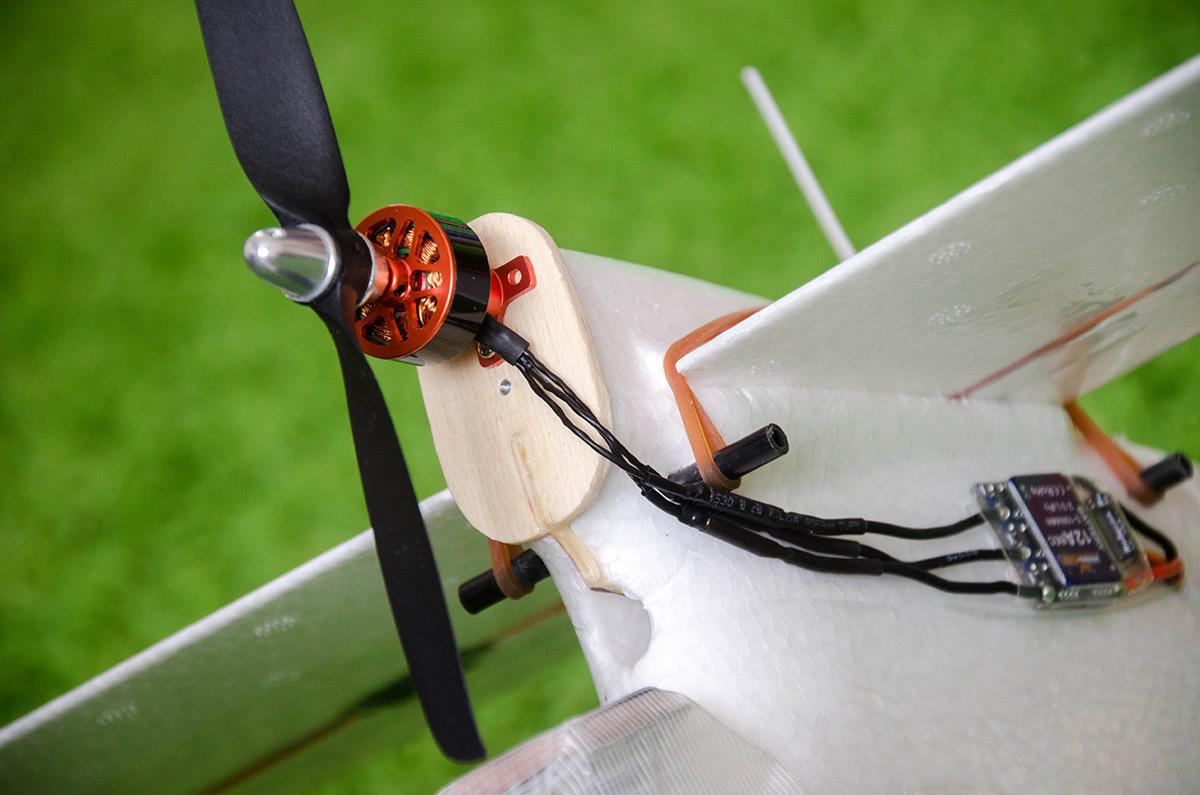
Мотор: Turnigy 2211 1700kv (6X3 проп)
ESC: HobbyKing 12A BlueSeries
Сервы: 3x HXT500 (без руддера)
Камера: RunCam 600TVL DC 5-17V (2.8 lens)
Видео: 1.3G 800mw
OSD: Mini OSD System w/GPS Module (прошивка u-osd)
Приемник: RMILEC R4047LITE
Стабиизация: OrangeRX RX3S 3-Axis Flight Stabilizer V2
Кстати, Кирилл, сколько у вас полетное время получилось и где конфиг? APM, камера, приемник – понятно, а мотор, сервы? Какая центровка?

А не поделитесь ли параметрами? У меня в FBW и круизе практически не управляется, летит по каким-то своим соображениям.
Как обещал, срисовал параметры в выходные. Если еще нужны. Пиды стоковые, в настройках только развернут контроллер на левый бок, компас отключен, порты под minimOSDextra. Контроллер HKPilot Mega Mini
Полетал в удовольствие в выходные. С 200мвт 5,8 получилось отлететь на 1,5км вдаль и 500м вверх, на приеме Хеликс 5.8 (голова как антенный трекер:)) Обратно испытывал RTL, APM отлично отработал.
Надо будет Мобиус приколхозить поснимать. У кого-нибудь опыт использования Мобиуса есть? Как крепили? Как курсовую, может быть?
Кстати, Кирилл, сколько у вас полетное время получилось и где конфиг? APM, камера, приемник – понятно, а мотор, сервы? Какая центровка?
Полетное время на батарейке 1050 было около 20 минут. С 1300, я рассчитываю до получаса летать.
Сервы: turnigy t541bbd на крыльях, t531bbd поворот камеры, HK-5330 наклон камеры, Turnigy 1440A РВ, РН.
Мотор: AX 1806N 2100kv / GWS 5043 / Plush 10A
Центровка примерно по проводу сервы… Такое впечатление, что не очень он чувствителен к центровке.
У кого-нибудь опыт использования Мобиуса есть?
Второй полет вчера с ним. Крепил под крыло на резинках. Перетягивает, на один бок, конечно. И на видео голова самолета. Но я пока так оставлю, потому что лучше не придумал. Позже фотку выложу
Уточнил центровку. Она более задняя - 45мм от передней кромки.
Так вот закрыт обзор мёбиусу с широкоугольным объективом.
С этим кадром еще связана страшная история.
Поставил я вместо обычного MinimOSD хоббикинговский miniminimosd. В полете видео и отрубилось. Проблема с китайскими OSD мне известная, и я особо не удивился. Потом видео появилось и надо бы было сразу сесть. Но куда-то полетел дальше, а видео пропало еще раз. Включил RTL, самолет вернулся, видео тоже вернулось, посадка и домой OSD чинить.
А страшную историю я увидел на видео. Оказалось, что пока я зевал на черный экран, самолет потихоньку снижался. Когда наконец включил RTL, во время разворота почти на 180 градусов была просадка на 6 метров - вероятно, камера в этом тоже помогла. В результате видим то, что на картинке: над проводами прошел метрах в двух.
Уточнил центровку. Она более задняя - 45мм от передней кромки.
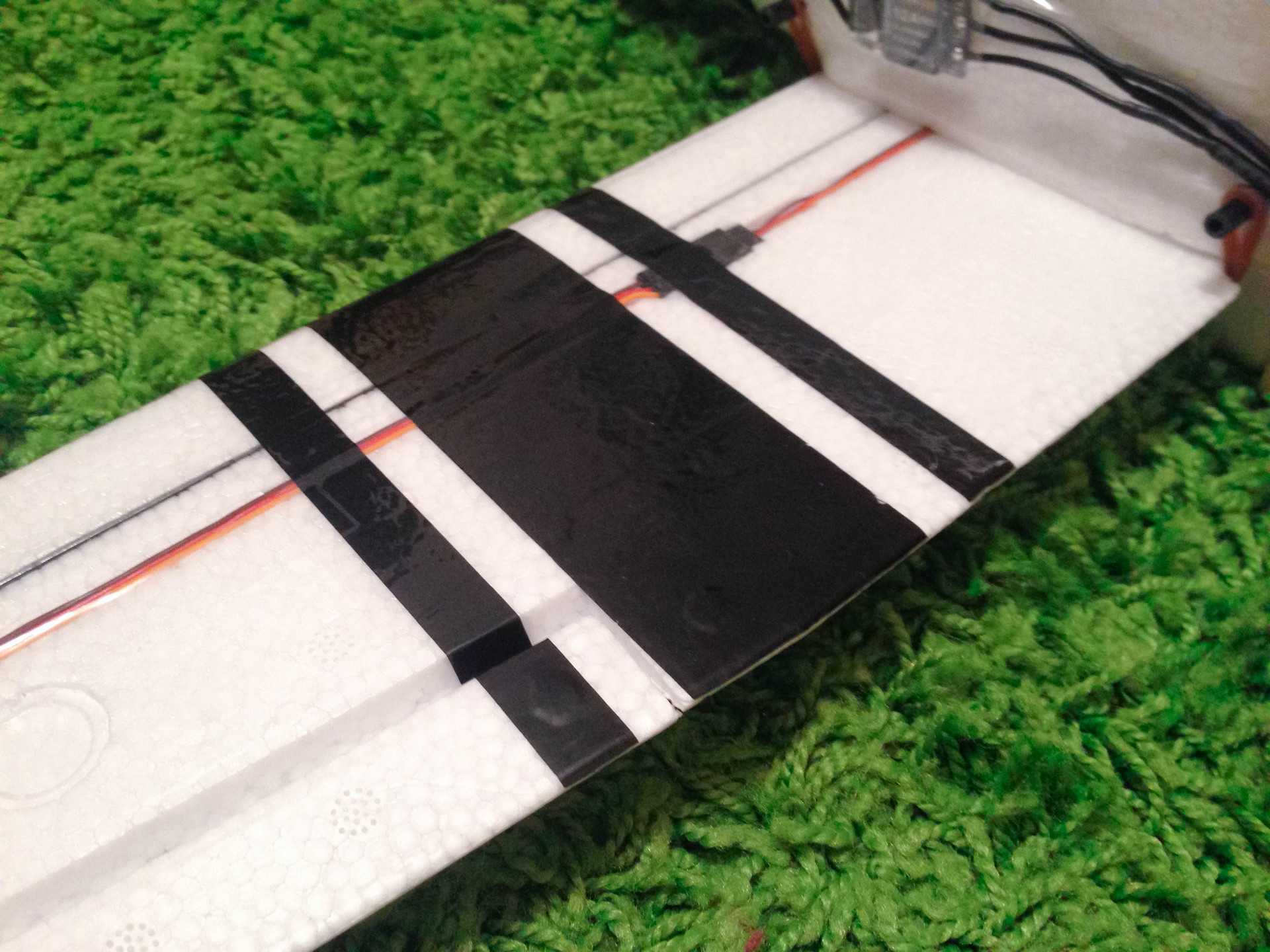
У меня получается также, но с 2я болтами в носу 😦 погода пока не позволяет облетать – ветер сильный. Пока занимаюсь украшательством) Заклеил крышку черным скотчем, а то белый давал засветку на камеру, да на крыльях что-то вроде полос вторжения))



Кстати, кто при каком ветре запускал?
Кстати, кто при каком ветре запускал?
Дык это, главное, чтобы вперед летел 😃
Со стабилизацией проще, конечно.
Крейсерская скорость получается где-то 40-50 км/ч.
Крейсерская скорость получается где-то 40-50 км/ч.
Как у Вас это получается?
У меня нормально управляться начинает километров с 60 в час. При 45 приходится ловить, норовит не то, чтобы свалиться, но куда-то повернуть помимо моей воли.
Включил RTL, самолет вернулся, видео тоже вернулось, посадка и домой OSD чинить.
Вопрос. Скажите пожлста, режим РТЛ действительно работает на хоббикинговском мини OSD?
А то чегото не видел в их рекламе.
Спасиба.
на хоббикинговском мини OSD
Это, наверное, не ко мне вопрос. Я про ArduPilot говорил.
Как у Вас это получается?
У вас двухмоторный вариант? Может, из-за этого капризный такой?
У вас двухмоторный вариант?
Двухмоторный - это у меня третий, одномоторные такие же скоростные.
Первый одномоторный улетел, второй с АПМ пытаюсь довести до ума.
Вообще-то двухмоторный более предсказуемый и комфортный в управлении.
Крейсерская скорость получается где-то 40-50 км/ч.
управляться начинает километров с 60 в час.
15 км/ч в безветрие скорость сваливания. Большая скорость сваливания из за большого веса
Я где-то 30 на посадке получаю. Вообще, рулится он хорошо вплоть до сваливания. Так что не знаю, почему могут быть проблемы с управлением на скорости 40. Может, торчит что-то, мешает обтеканию стабилизаторов? Или тяжелый слишком? Это с APM проблемы, или без стабилизации тоже?
Сегодня вот решил батарейку полностью съесть. 997 mAh это врет она - power module на маленьких токах врет.
Наверно потому что центровка задняя
Облетал, если так можно сказать)))
А что у Вас на шкалах ОСД?
Там вроде все понятно 😃
время полета, общее пройденное расстояние, индикатор дома, максимальная дальность, количество спутников
скорость, направление домой, высота
напряжение аккума, направление домой в градусах, rssi
долгота, дальность от дома, широта
Вообще это прошивка u-osd для g-osd и тому подобных бюджетных osd, там можно много чего настроить.
У меня такая же ОСД, я пытаюсь понять скорость, на которой он у Вас летает. По левой вертикальной шкале? В м/с?
Должно быть в км/ч но по видимому м/с