Посадка парашютированием Mini Talon (можно и maxi)

Причём винглеты ( законцовки крыла ) ?
Бесхвостка без классического стабилизатора ( ГО)! Вы можете на Талоне , у V хвоста сделать управление только по РН , а на крыле сделать элевоны , и модель будет летать и также управление будет . А вот на модели как я показал , такое не получиться , элевоны будут отрабатывать по РВ наоборот .
Я уже писал , всё дело в центровке . Фокус - нейтральная центровка , для крыла это 25 % . По расчёту “на глазок” ( могу малость и ошибиться , судя по размаху ) .
Нейтральная центровка 76-78 мм , ЦТ 60-65 мм .
У " обычного" высокоплана центровка больше 25% САХ крыла .
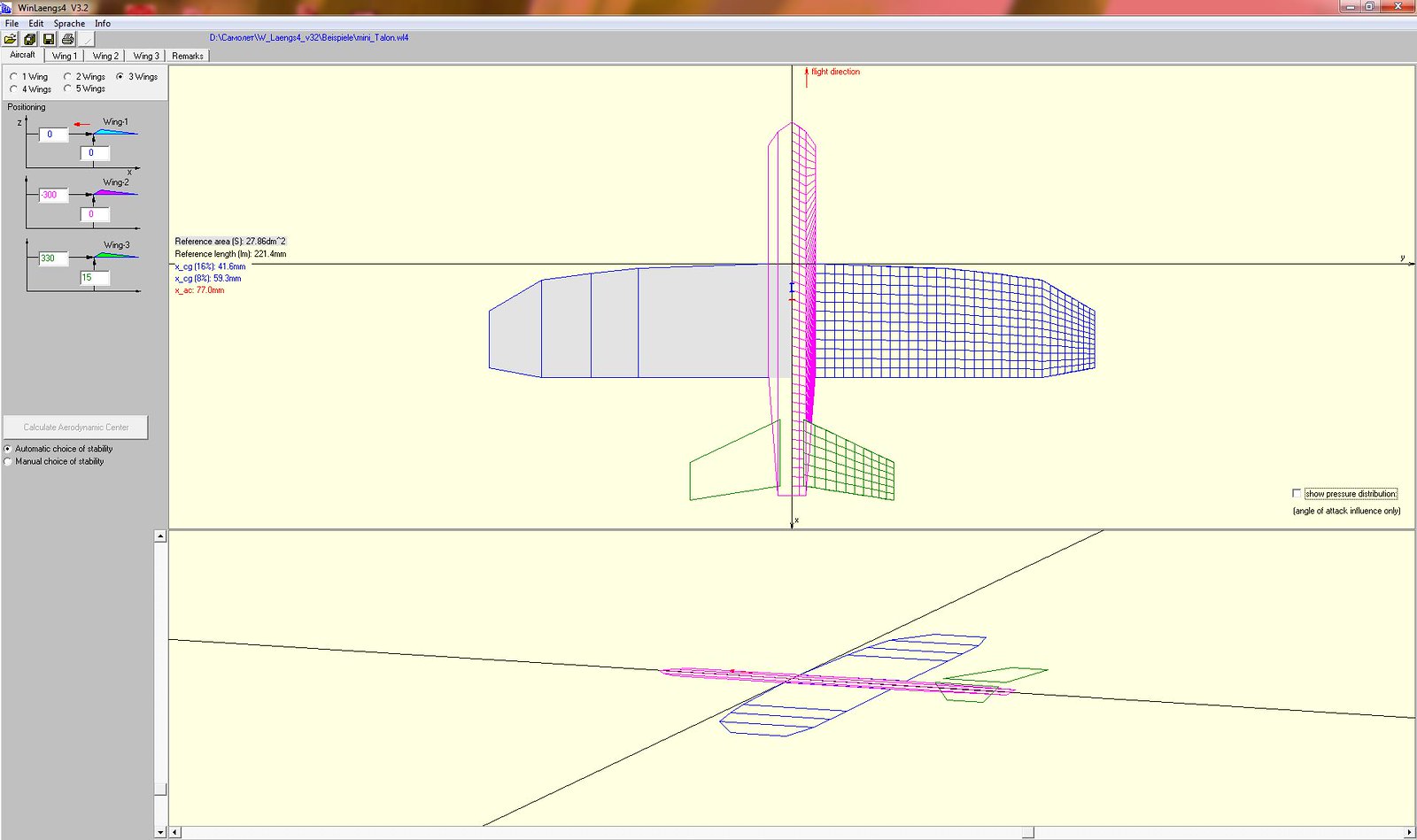
картинка кликабельна
X_ac = 77mm (нейтральная)
Вы считаете по корневой хорде , а я вам предлагаю пересчитать по САХ и у вас получится меньше 25% САХ .
Пересчитал. Хвост исчез. Ура на крыле летаю. Нада в АПМе элевоны микшировать.
Доработка Талона заключается в следующем:
При старте и нормальном горизонтальном полёте носовой винт не используется, его положение не контролируется. Винт маленький, его сопротивление вряд ли будет больше чем у антенны 1.2 ГГц и тем более - камеры с подвесом.
Но этот “маленький винт” будет вращаться от набегающего потока. И Вы получите самолёт+автожир. А т.к. винт установлен далеко спереди ЦТ - постоянный кабрирующий момент.
Посадка выглядит следующим образом:
- Включается носовая ВМГ вместе с гироскопом. Всё это вместе начинает удерживать самолёт в горизонте.
Это каким образом? При включении ВМГ дополнительно к уже имеющемуся кабрирующему моменту от авторотации появится прирост момента от тяги ВМГ.
Реализовать Вашу задумку можно только при использовании хвостового винта от вертолёта, т.е. гироскоп должен управлять шагом, а не оборотами. И всё равно “удерживать самолёт в горизонте” гироскоп не может, он только гасит колебания. В горизонте может удерживать только автопилот.
PS: Довести модель до срывного режима можно разными способами, в т.ч. и реверсом основного винта.
Каким образом, в обратную сторону крутить? Не получится. Только при использовании ВИШ, а он у Вас есть?
P.S. Вы не согласились ни с одним из предложений и советов - ни с теоретическими, ни с практическими. Зачем было открывать тему? Модели у Вас уже есть. Зачем ждать именно Mini Talon? Опробуйте свою идею на имеющихся моделях. Если носовая часть короткая, вынесите мотор на штанге. А то слов очень много и все ни о чём.
Я просто увеличил картинку на мониторе и измерил всё линейкой , потом рассчитал , центровка совпадает ?
я про вас особо и не писал, и даже в подтверждение ваших слов описал практическое применение. я больше возмущался по поводу якобы красивых посадок и того, что тут изобретают велосипед. у каждого самолета свои особенности и просто тут нужно пониманить, что телона своя манера посадки. даже я бы не сказал, что своя. посадка у него обычная, как для самолета, а не как у ская, на котором достаточно просто выключить движек и самолет сам в стабилизации нормально плюхнется на землю
что тут изобретают велосипед.
Задумка Ильи , не означает , что изобретать велик , тем более это уже испытано раньше .
Он наверно просто хочет наступить на те-же грабли .
Даже на моделях конвертоплан делают 3 ВМГ ( с двумя только в штиль летать ) .
Он не понимает , что если вся модель в срыве , даже если будет устойчивость по крену за счет поперечного V крыла , а продольную устойчивость не обеспечит один ротор на носу , для балансировки нужен ротор в хвосте . А с одним - это тоже самое как двигать акк в полёте по длине фюзеляжа , центровка будет задняя и хана модели , свалится на хвост .
Всё это слишком сложно , намного проще сделать доработки в аэродинамике и модель будет способна летать в разных режимах .
что телона своя манера посадки. даже я бы не сказал, что своя.
Ещё не придумали отдельную аэродинамику для Талона , все модели летают по законам аэродинамики . И талон можно сделать способным парашютировать .
я и не говорю, что аэродинамика тут другая. просто в большенстве случаев моделисты летают на более тихоходных самолетах и поэтому они не на столько требовательны на этапах посадки и спокойно выдерживают кривость руления. с телоном тоже можно так садить, но только не долго, т.к. тушка быстро прийдет в негодность
мне вот больше интересно, а что вы скажете, если попробовать наоборот, элероны задрать вверх на посадке? сильно критична будет потеря подъемной силы по сравнению с задиранием носа?
кстати, когда летал с флаперонами, как-то случайно включил их в полете, когда летел в круизном режиме. т.к. я не сразу это заметил, не мог понять, почему АП выжимал почти полный газ, хотя с круизе он у меня меньше 50% берет. а оно оказалось из=за опущенных флапперонов, которые создавали пикирующий эффект. АП пытая выровнять самолет, видать, тянул РВ вверх и добавлял газ, но видать усилия не особо и хватало, что он только на 80-90% газа мог удерживать высоту. замечу, что в круизе АПМ слабо рулит РВ для стабилизации, что достаточно для нормального полета, но было недостаточно для полета с опущенными флаперонами
с телоном тоже можно так садить, но только не долго, т.к. тушка быстро прийдет в негодность
Полностью с вами согласен ! Такой “кирпич” плюхать - только гробить модель и начинку .
Но, парашютирование - это не только способ посадки , а маневр для снижения с большим углом атаки и не обязательно исполнять его до земли .
ну большой угол атаки я пытаюсь делать только у самой земли. тянуть РВ на себя при подлете к полосе - опасно заваливанием на крыло. в нормальных условиях он и в таком случае будет снижаться без проблем, но вот неудачный порыв ветра чреват заваливанием. я один раз так его завалил, не совсем на посадке, но при заходе на нее, когда на небольшой скорости разворачивался в подветренную сторону. кстати, еще на посадке опасно резко давать газ - тогда самолет заметно начинает закручивать реактивным моментом
вот в конце видео тот краш (8:25)
ну большой угол атаки я пытаюсь делать только у самой земли. тянуть РВ на себя при подлете к полосе - опасно заваливанием на крыло. в нормальных условиях он и в таком случае будет снижаться без проблем, но вот неудачный порыв ветра чреват заваливанием. я один раз так его завалил, не совсем на посадке, но при заходе на нее, когда на небольшой скорости разворачивался в подветренную сторону. кстати, еще на посадке опасно резко давать газ - тогда самолет заметно начинает закручивать реактивным моментом
я на посадке элероны опускаю градусов на 15, мне кажется помогает уменьшить скорость…
газ действительно резко давать нельзя, однажды хотел уйти на второй круг и заморковил завалом на крыло…
я на посадке элероны опускаю градусов на 15, мне кажется помогает уменьшить скорость…
Конечно это увеличивает сопротивление за счёт изменение кривизны профиля , получается положительная , геометрическая крутка крыла .
Только легко поймать срыв на крыле , не даром закрылки делают у центроплана .
Если будете отклонять вверх оба элерона , они не будут в срыва , а ещё и РВ не надо будет так сильно тянуть вверх ( элевоны разгрузят РВ ) .
Тем более если отклонять закрылки меньше 25 градусов - считается взлётным режимом .
Посадочный не меньше 45 градусов .
градусов на 15
делал где-то так-же, нос сильно опускал, что РВ в посадочном режиме мне не хватало. не понравилось
Но этот “маленький винт” будет вращаться от набегающего потока. И Вы получите самолёт+автожир. А т.к. винт установлен далеко спереди ЦТ - постоянный кабрирующий момент.
… При включении ВМГ дополнительно к уже имеющемуся кабрирующему моменту от авторотации появится прирост момента от тяги ВМГ.
От потока, набегающего на винт под углом 90 градусов к его оси, винт вращаться не начинает. Авторотация возможна только при осевой составляющей потока, и не маленькой. Проблема отсутствует.
Реализовать Вашу задумку можно только при использовании хвостового винта от вертолёта, т.е. гироскоп должен управлять шагом, а не оборотами. И всё равно “удерживать самолёт в горизонте” гироскоп не может, он только гасит колебания. В горизонте может удерживать только автопилот.
Колебания гасит не гироскоп, а акселерометр. Автопилот для управления одной степенью свободы конечно сгодится, но это как стрелять из пушки по воробьям. Мне нужна 1/10 часть функций автопилота, и такие устройства в природе существуют.
Кстати, а объясните, чем ВИШ от вертолёта лучше обычного винта с регулировкой оборотов. Я как раз был удивлён, когда узнал что на модели вертолётов ставят на хвост ВИШ со всей трансмиссией, вместо отдельного мотора с регулировкой оборотов и ВФШ
Каким образом, в обратную сторону крутить? Не получится. Только при использовании ВИШ, а он у Вас есть?
Применю реверсивный регулятор хода.
P.S. Вы не согласились ни с одним из предложений и советов - ни с теоретическими, ни с практическими. Зачем было открывать тему? Модели у Вас уже есть. Зачем ждать именно Mini Talon? Опробуйте свою идею на имеющихся моделях. Если носовая часть короткая, вынесите мотор на штанге. А то слов очень много и все ни о чём.
Тему я создал потому, что поднятые вопросы пока не обсуждались ни в одной другой теме этого форума. Судя по 1.5 сотням ответов, интересно не одному мне.
Модели с V-хвостом у меня сейчас нет. А модель с неповоротным горизонтальным стабилизатором будет парашютировать совершенно по другому. Поэтому я жду Талона.
Поэтому я жду Талона.
Уже предлагал , сделайте самодельную модель по схожим размерам и опробуйте вашу задумку .
Не обязательно гробить мини Талон , чтобы проверить , он вам ещё пригодится для FPV .
Когда будете летать с оборудованием FPV , всё лишнее выкинете из модели и забьёте на это парашютирование , при необходимости установите парашют .
Для вашей задумки надо два “мозга” на модель ставить и чтобы они подружились в разных режимах полёта .
Уже предлагал , сделайте самодельную модель по схожим размерам и опробуйте вашу задумку .
Не обязательно гробить мини Талон , чтобы проверить , он вам ещё пригодится для FPV .
Мне проще угробить Талон. Не получаются у меня модели из потолочки за два вечера.
Для вашей задумки надо два “мозга” на модель ставить и чтобы они подружились в разных режимах полёта .
Может получиться, что и мозг будет один.
Сейчас активно выясняю как быть с мозгами. Один из вариантов имеется почти в готовом виде. Я летаю с Аркбирдом, а там можно вывести каналы для управления подвесом камеры. Работаю эти каналы от собственных автопилотных акселей-гироскопов. Нормально работает, я пробовал. Канал для камеры по тангажу - что доктор прописал.
Остаётся откалибровать регуль “верхний и нижний уровень газа”? и вуаля.
Но честно говоря, не охота сразу возиться с а/п. Я больше хочется попробовать на отдельном гироскопе. Судя по тому что я вычитал у вертолётчиков, хвостовой гир от вертолёта вполне подойдёт.
Я больше хочется попробовать на отдельном гироскопе.
Гироскоп только гасит колебания , а так как ротор впереди сила всегда будет направлена вверх . Даже если примените автомобильный регуль с реверсом , он не отрабатывает так быстро в реверс ( уже проверено , ему нужна остановка в “0” газа для торможения , получите длинную паузу). Вам лучше применить ВМГ как для 4D пилотажек , там серво поворачивает лопасти , её и можно посадить на автопилот по РВ .

Так игрушка , в обычном полёте будет мешать .
Но , если у вас модель в парашютирование задерёт нос и начнёт срываться V-хвост - автопилот отвечающий за хвост " сойдёт с ума" и будет пытаться выравнить модель опуская РВ , тем-самым ещё больше срывать хвост , в результате модель провалиться на хвост .
От потока, набегающего на винт под углом 90 градусов к его оси, винт вращаться не начинает. Авторотация возможна только при осевой составляющей потока, и не маленькой. Проблема отсутствует.
Неужели? Чтобы не быть голословным и не утомлять Вас теорией, провёл небольшой эксперимент. Одел винт на ось и дунул обычным феном. Вращается однако. И откуда Вы взяли, что ВЕСЬ полёт плоскость винта будет находиться под нулевым углом к потоку?
Колебания гасит не гироскоп, а акселерометр. Автопилот для управления одной степенью свободы конечно сгодится, но это как стрелять из пушки по воробьям.
Неужели? Гироскоп гасит угловую скорость, а акселерометр угловое или линейное ускорение. И ещё оба устройства используются в составе автопилота и для демпфирования и для управления.
Кстати, а объясните, чем ВИШ от вертолёта лучше обычного винта с регулировкой оборотов.
Реакция выше. ВИШ используется в пилотажных вертолётах, а ВФШ исключительно в игрушках. А вообще в Вашей затее без разницы. И тот и другой винт просто опрокинет самолёт и никакая “волшебная коробочка” не поможет.
Всё дело в том, что необходимо зафиксировать самолёт на каком-то закритическом угле атаки, на котором он начнёт “сыпаться”. А это при нехватке руля высоты сможет только автопилот, настроенный на этот режим, да и то не каждый.
Или тренируйтесь руками держать этот угол, что вряд ли получится - реакции не хватит.
Применю реверсивный регулятор хода.
Уже ответили - это всё же самолёт, а не автомобиль или корабль.
Судя по 1.5 сотням ответов, интересно не одному мне.
А мне показалось, что Вам пытаются объяснить, что Ваше решение тупиковое.
Неужели? Чтобы не быть голословным и не утомлять Вас теорией, провёл небольшой эксперимент. Одел винт на ось и дунул обычным феном. Вращается однако. И откуда Вы взяли, что ВЕСЬ полёт плоскость винта будет находиться под нулевым углом к потоку?
Александр, судя по тому, как Вы поверили в результат своего “эксперимента” с феном, теории Вы не знаете тоже. И Вам нечем меня утомлять 😃
Повторюсь ещё раз: проблема авторотации отсутствует. Хотя бы потому, что она легчайше устраняется настройкой тормоза на регуляторе хода. Вот Вам доказательства из поста №85, что это так:
static.rcgroups.net/forums/a...205_092814.jpg
Неужели? Гироскоп гасит угловую скорость, а акселерометр угловое или линейное ускорение. И ещё оба устройства используются в составе автопилота и для демпфирования и для управления.
Вы и тут неправы. Ни гироскоп ни акселерометр ничего не “гасят”. Они только измеряют.
Реакция выше. ВИШ используется в пилотажных вертолётах, а ВФШ исключительно в игрушках…
Возможно, и выше. Это не мешает использовать ВФШ в мультикоптерах. Скорость реакции там нужна не меньше чем у вертолётов.
А мне показалось, что Вам пытаются объяснить, что Ваше решение тупиковое.
Ничего страшного, меня устраивает ход обсуждения. Это как ехать по неосвещённой дороге в свете встречных фар. На самом деле, всё-то видно 😃
Александр, судя по тому, как Вы поверили в результат своего “эксперимента” с феном, теории Вы не знаете тоже. И Вам нечем меня утомлять
Повторюсь ещё раз: проблема авторотации отсутствует. Хотя бы потому, что она легчайше устраняется настройкой тормоза на регуляторе хода.
Где уж нам уж… Про настройку тормоза я в курсе, настраивал. Только вот (не дословно): “в полёте винт не контролируется” не Ваши ли слова? Так что не надо выкручиваться.
Вы и тут неправы. Ни гироскоп ни акселерометр ничего не “гасят”. Они только измеряют.
Что, нравится передёргивать? Вы для начала на свою фразу там по поводу гироскопа и акселерометра обратите внимание.
P.S. А на принципиальное высказывание о самой идее что-то возражений не последовало. Или “слона то я и не приметил”? Впрочем это обычное дело у подобных “изобретателей”.
По поводу реверса регулятора , обратите внимание на звук работы винта при реверсе .
И кстати тяга у винта при реверсе очень мала . То есть гироскоп будет реагировать по разному .
Это мы делали гидроплан с задним ходом , в случае заплыва в кусты , чтобы мог сделать задний ход .
Модель летала , не долго , до открытой воды не дожила 😵
Алексадр 53, ваши посты до ужаса теоретизированны, что не тема так ощущение что знаете только поверхностно.
Не нужно упрекать других людей в передергивании, ваша стилистика общения способствует подобной реации в ответ.
Теоретизировать можно вечно, до тех пора пока не начать считать.
К теме о Реверсе, она мне больше нравится, я уже выше писал что рассчитаю глиссады с реверсом, всего-то нужно компенсировать проекцию веса при интереующем угле глиссады.
Касательно моментов инерции ВМГ постоянного шага и отклика на управляющий сигнал, все уже протестированно и настроено, я давал ссылки на софт в соседней теме когда этот вопрос поднимался.
Чтобы развеять миф я прикреплю видеоролик заграничного пилота
Идея Ильи абсолютно реальна при должном к ней подходе.
Алексадр 53, ваши посты до ужаса теоретизированны, что не тема так ощущение что знаете только поверхностно.
Ну конечно же не так глубоко как Вы. И поконкретнее можно? Что я такого “до ужаса” затеоретизированного и поверхностного написал? Только конкретно.
И внимательно прочтите свой пост. Он ни о чём. Что значит
Идея Ильи абсолютно реальна при должном к ней подходе.
В чём конкретно она реальна? “Волшебная коробочка” в виде вертолётного гироскопа всё решит? И что значит “при должном к ней подходе”? Автопилот? Так не любит он в них “ковыряться” (или не хочет). Вот хотелось бы конкретики относительно “должного подхода”. Вы уж снизойдите пожалуйста и расскажите как решить проблему посадки с парашютирования Мини Талона предложенным ТС способом.