Автопилот iNav полёты с GPS

Сделал как вы написали ,получился вообще ералаш, но на другом крыле это работает нормально. Одной серве я делал реверс внутри сервы , и если бы я накосячил она бы не работала. Сейчас когда один елевон не поднимается по питчу миксы такие 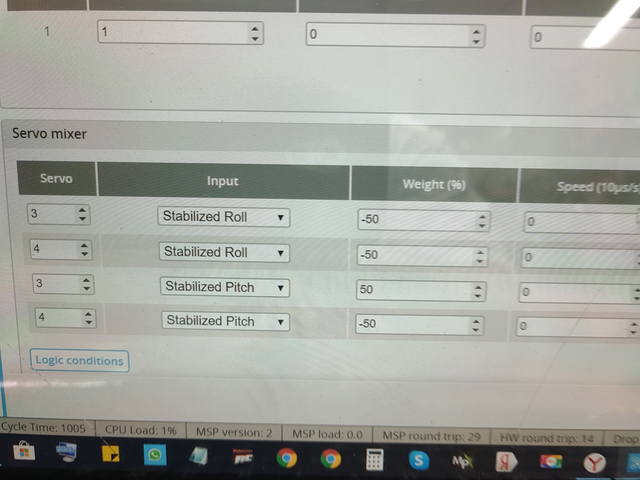
Вам мистел ответил верно.
Первое -убрать все что накосячино в аппе -ее не трогают вобще.
Затем сзади глядим на крыло -3я слева - 4я справа.
С вкладки стабилизации -что на фото -уходим.Делаем правильные миксы в айнаве вначале при ручном управлении стиками.
Затем стабилизация -первые две строки -стабилизация по ролу.
ЛОГИЧНО что они должны быть с разными знаками) одна серва вверх - другая вниз.
2 посл. строки -стабилизаци по питчу.
3я и 4я сервы должны быть с одинаковым знаком.(нос крыла вниз -обе сервы поднимают элевоны . Нос крыла вверх -обе опускают.)
Ну хорошо давайте по пунктам, в пульте проверил все чисто , никаких миксов контрольных точек и т д.
Остальнык пункты сливаются в один, если элевоны работают не верно, но работают и мы делаем одному инверт , он должен сменит направление, а он перестает работать СОВСЕМ и причем здесь стабилизация. сейчас загружу ролик по вкладкам
Александр, перепрошей с полным стиранием и всё заново ручками установи, должно заработать. Бывает такое, почему не спрашивай, не знаю, но было.
И зачем реверс внутри сервы?
Але…але…Шож вы так шастаете стиками -куда и что…не понятно…
Рекомендую…
Создайте нов. модель -винг или дельта…
Дайте ей тотже номер ID приемника что и у этого -согласитесь ( биндить не надо).Приемник будет работать на нов. модели.
Затем во вкладке ресивера проверьте правильность каналов стиков -рол…питч…( если надо меняйте AETR…TAER) -пока не будет совпадения по стикам.
Затем ручное управление -миксы.
Сервы после включ. дожны встать в средн. положении -по дефолту.
И уж затем можно лезть в стабилизацию. -и менять знаки.
Что за микс??Да хоть пресет Рептилии залей.
Проверь какую прошивку льеш…И полная очистка от старой.
…
наверное все же в пульте , сейчас выбрал другую модель такое же крыло в пульте и начало работать нормально. Спасибо братцы)
Ну вот опять.
- Делаем миксы в полетнике так чтоб стабилизация отрабатывала верно. (крыло вверх носом - оба элевона вниз, крыло вправо - правый элевон вниз, левый вверх)
- Проверяем управление стиками , если неверно - то коректируем инверты в аппаратуре.
- Всё ничего больше не трогаем !!! 😃. (ну если не знаем для чего не трогать 😃)
Только такой порядок.
Проверьте что вы правильно подпаялись к полетнику ( 1 -мотор…3-4 сервы)
сейчас возьму две новые сервы не реверсированные и все сделаю то же самое.
Не нужно.
А вот нету высоты, дальше деревья. Вот что делать?
Тоесть при подключении к компу ничего не горит? Или комп не определяет?
Для начала отпаяйте всё от полетника, проверьте тестером на коротыши, посмотрите datasheet проца и проверьте доходит ли до него 3,3 вольта или сколько ему там надо. Короче с тестером поиграйтесь.
Можно подключить к компу и потрогать пальцем плату и узнать что где сильно греется, возможно в этом и есть проблема.
ни от питания,ни от компа жизни не подает…спасибо за совет,буду пробовать тестером…
Я когда плюс с минусом перепутал (как обычно), подключил блок питания, установил 5 вольт, 1 ампер и пальцем проверял где что греется.
Я когда плюс с минусом перепутал (как обычно), подключил блок питания, установил 5 вольт, 1 ампер и пальцем проверял где что греется.
Хороший метод! А я обычно по сизому дыму определяю не правильность подключения- так быстрее))
А я обычно по сизому дыму определяю не правильность подключения- так быстрее))
Это не сызый дым, а волшебный 😃 на нем вся электроника работает, если вышел то всё нужно новый дым 😃.
У меня не только дым, но и пламя пошло: сгорел защитный диод (или как правильно он называется) от переплюсовки.
А потом при помощи блока питания нашел три сгоревшие понижайки на полетнике.
Всем привет! Помогите разобраться в следующей ситуации: крыло Dart250g с полетником Matek F722 летает уже полгода без проблем. Недавно произошла странная ситуация.
Летел до определенной точки в режиме удержания высоты. Высота была около 350 м. На подлете к точке выключил режим удержания и начал снижаться, где-то до 250 метров. Связь ухудшилась, видео пропало. Я включил тумблером возврат домой. Самолет развернулся и вроде бы летел домой. Но тут пульт мне сообщил, что высота 190 метров. И она продолжала падать. Я наблюдал это на пульте через LuaScript для телеметрии.
В итоге где-то на 160 метрах мне пришлось выключить возврат, и вслепую, вручную дать газу и потянуть стик на себя для набора высоты. Lua телеметрия и быстрая реакция спасла самолет над лесом.
Потом, когда видео пришло в норму и связь восстановилась я попробовал еще раз включить возврат, и он отработал нормально, высота удерживалась.
Вопрос: почему при активации RTH не работало удержание высоты?
Для анализа есть логи OpenTX. Я вывел 3 графика: высоту, текущий режим полетного контроллера (именно текущий режим, а не положение тумблера), а так же график курса, где видно, что самолет разворачивается при включении режима RTH.
Кроме этого, я записал скрин с программы Telemetry Viewer где так же четко виден текущий режим, параметры высоты и другое.
Резкие ступени в графике высоты и курса, а так же резкие дергания на видео возникли из-за кратковременной потери пакетов телеметрии.
В итоге где-то на 160 метрах мне пришлось выключить возврат
А какая высота возврата домой стоит в RTH?
А какая высота возврата домой стоит в RTH?
80 метров. Но там так же в параметрах выставлено nav_rth_alt_mode = AT_LEAST, то есть набор высоты если ниже, а если выше то будет продолжать лететь на исходной.
80 метров. Но там так же в параметрах выставлено nav_rth_alt_mode = AT_LEAST, то есть набор высоты если ниже, а если выше то будет продолжать лететь на исходной.
В последних версиях еще добавили функцию снижения до высоты возврата в процессе полета домой, чтобы потом по спирали не кружить и съэкономить батарею
В последних версиях еще добавили функцию снижения до высоты возврата в процессе полета домой, чтобы потом по спирали не кружить и съэкономить батарею
Какой это параметр, как это выключить?
не то del)
Какой это параметр, как это выключить?
Так это линейный спуск, а не резкий. Так что он врятли тут виноват