Автопилот iNav полёты с GPS

Что то не складывается в моем скромном мире. У меня хорошие АКБ новые с токоотдатчей 120С при токах от 40-60а на двухмоторнике проседает как и положено до 15,5 в- это норма для свежих акумов. Ниже 15 вольт только старые, а тут с 16,5 вольтах при взлетом 80а до 16,0 опустилось и при круизе 25—30 ампер что довольно таки не мало просадки не наблюдается.
Каждый сам решает верить или нет, на крыле 2 батки, просадка до 4 вольт на банку. Пытался на Лион Сони мурата 9000/4 s так вот они проседали до 3,3 вольта на взлете и больше 60 а не отдавали полностью заряженные.
Добавлю:) на взлете скорость подъема до 11 м/с крыло даже скорость еще не набрало и газ я уже немного снизил, вес крыла 2,6 кг я думаю это о чем то говорит, ну да ладно.
можем к примеру проверить кто за сколько секунд /минут поднимется к примеру на 2 тыс метров
😃
2 мин 45 сек 3000 метров
тут помедленнее
ACS758LCB-100U-PFF-T. По тестам должен и за 200 ампер кратковременно переварить и более точный.
Я взял за теже деньги уже обвязанный aliexpress.ru/item/32970699428.html?spm=a2g0o.prod… правда подружить не удалось, придется к тебе обращаться)
2 мин 45 сек 3000 метров
Ну этоже пуля)
Я взял за теже деньги уже обвязанный
Я без обвязки напрямую подключал. Только к матек ф765-винг и прошивка на арду, хотя это значение не имеет. Шяс зайду на сайт матека, посмотрю куда подключать датчик тока.
Кстати, матек 405 винг расчитан на 60А постоянного и 104А кратковременного потребления тока.
равда подружить не удалось, придется к тебе обращаться)
Потыкался, подумал.
Попробуй в cli ввести данные значения:
set rssi_adc_channel = 2
set current_adc_channel = 3
Данным методом мы меняет местами датчик тока и rssi. Если rssi не занят.
И после ввода как всегда вбить save, чтобы сохранить данные.
А дальше сигнальный провод от датчика тока подключить к rssi. Ну а сам датчик питать согласно твоей обвязке. Если не путаю, то у меня без обвязки датчик запитан от 3,3 вольта.
Офсет и делитель настроишь сам (или пиши мне, помогу настроить).
Если я наврал и все неправильно, то вбей значения по умолчанию:
set rssi_adc_channel = 3
set current_adc_channel = 2
Будем дальше думать
Кстати, матек 405 винг расчитан на 60А
Купил давно и уже забыл, думал что 100 рабочий, пока ограничу взлетный ток и займусь датчиком, тяги достаточно даже на 60 А легко уходит
Оказалось не все так просто, запаял место где перегорела фольга , но появился коротыш между + и - соплей точно не навешал. Обрыв пометил белым, скажите что за элемент 50 ОМ . полагаю резистор , но я больше столяр чем электронщик.😁 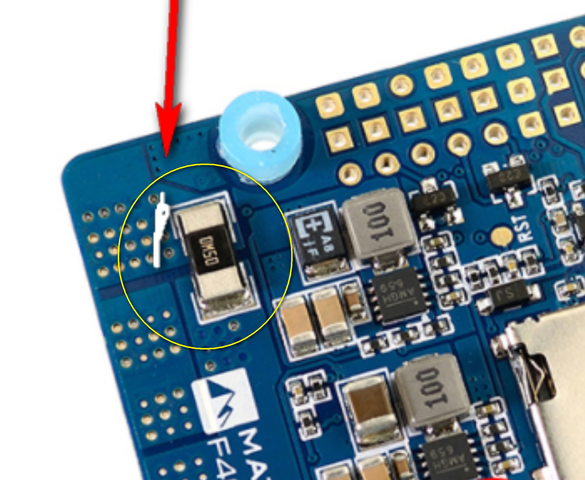
полагаю резистор
Он и есть, но его еще называют шунт и он на 0.5мОм, если не путаю
…
братцы, подскажите пытаюсь настроить возврат домой по фалсейф, когда наступает файлсейф активируется вот такой режим и самик устремляется куда то только не домой. Если с пульта включаю RTH или файлсейф то возвращается на точку исправно. Что это за режим? И что должно быть написано когда реально связь потеряна и возврат домой происходит? Эти же четыре буквы без надписи автотрим появляются когда 3d круиз включаю. Если просто на земле, в точке арминга отключить аппу то мотор включается и самик пытается улететь.
Это режим настройки расходов/нейтрали. Посмотрите у себя в режимах, что то не так настроено по значениям для этого канала…
Что это за режим?
Как вас так угораздило собрать и не знать что это такое. Это в первую очередь нужно знать. Автотрим - это триммирование серв. Тоесть летишь в мануале ровно и прямо, включаешь автотрим и две секунды как миниму летишь прямо. Тумблер не выключаешь, приземляешься и сохраняешь через стики или через комп. Тогда полетник запоминает правильное (нейтральное) положение серв для прямолинейного полета.
3CRS - это режим для прямолинейного полета с удержанием высоты при отпущенных стиках. Удобно летать на дальняк.
А по факту, надо смотреть зачем ты в режимах назначил тумблеры на автотрим и так же скорее всего надо настроить приемник на fs. Скорее всего из-за него автопилот неправильно понимает fs
Спасибо за ответы, начинаю просветляться) да у меня на тумблер этот режим автотрим назначен вместе с автотюном. Я понял видимо приёмник при FS включает канал этого тумблера вместо собственно fs режима.(Промониторю на столе, но видимо так и есть) Приёмнику настраивал FS ещё без полётника когда летал, чтобы он все каналы в ноль выводил, возможно и накосячил что. А как надо настроить приёмник чтобы полётник понимал что fs? Ведь полётник сам понимает по какому то поведению/команде приёмника что fs или надо на какой то канал подключать режим FS и задавать приёмнику его включение? Как собрал, да методом проб и ошибок))
Никак не надо. Надо сбросить все настройки модели и приёмника перед тем как настраивать с полётником.
Никаких FS, реверсов или миксов. Всё делается в айнаве.
Индикатор включения режима FS в айнаве - светящийся значок парашюта в верхней части экрана
А как надо настроить приёмник чтобы полётник понимал что fs?
Если есть возможно выбрать протокол SBUS, ставь sbus. Он автоматом посылает полетнику сигнал о том, что связь пропала. Но я еще на пульте настраиваю при fs на газе значение ~960. Ну еще в айнаве rx_min ставлю ~990.
Просто никакой инфомации от вас по поводу пульта и приемника и как он подключен.
Может поможет данное видео:
подключен по Sbus, вот этим видосом я и руководствовался при настройке,но что-то сделал не так видимо, теперь понятно что и где искать, думаю теперь я разберусь, а то я первый раз этот osd экран увидел и что он пишет не пойму, а что должен писать не знаю) Спасибо за советы, очень помогли!
Мне казалось Inav игнорирует rc каналы при fs. Хотя сейчас почитал доку и не нашел упоминания об этом.
Игнорирует. При обнаружении что приёмник в фс, полетный контроллер выполняет только установленную задачу при фс. Неважно, что у вас там в каналах приёмника установлено. Другие режимы не будут включался. Если включаются значит полетный контроллер не видел потерю связи. Такое может быть при подключении приемника даже по сбас , в определенных случаях,если используется ретранслятор.
Мне казалось Inav игнорирует rc каналы при fs. Хотя сейчас почитал доку и не нашел упоминания об этом.
вот только “с ньюансами”
В некоторых ситуациях может оказаться, что в момент сброса флага ФС в буфере данных приемника может оказаться “любое знаение от последнего глюка”
И в момент сброса флага ФС это значение попадает в полетник.
Например - 1500 в канале арма, что будет квалифицировано как дизарм.
Глюк есть во всех приемниках ФРскай, а, так как сбасовский протокол списан с ФРская, то и в остальных тоже. ХЗ как с Футабой.
Вроде этот глюк должны были поправить
вот только “с ньюансами”
Эти нюансы?
inavfixedwinggroup.com/…/frsky-failsafe-disarm-bug…
Да, ссылку на статью не нашел вовремя.
Есть информация, пофиксили этот баг в 2.6 или нет? Сможет ли кто нибудь объяснить на русском, как на видео упомянутом в статье решили проблему дизарма? С аглицким на слух беда 😦
самый простой способ - растянуть диапазон арма до 1200 где то
самый простой способ - растянуть диапазон арма до 1200 где то
Что это даст, если, судя по статье, глючный сигнал приходит 988?