qczek lrs – 433mhz 1w (30dbm) lora rc link with telemetry - новая народная?

А не вспомните как по умолчанию?
1,2,4,5 каналы-1500, 3 -1000 (или 900), 6-16 - 1000
На 1.92 все по 1000
А не вспомните как по умолчанию?
Смотрим у автора 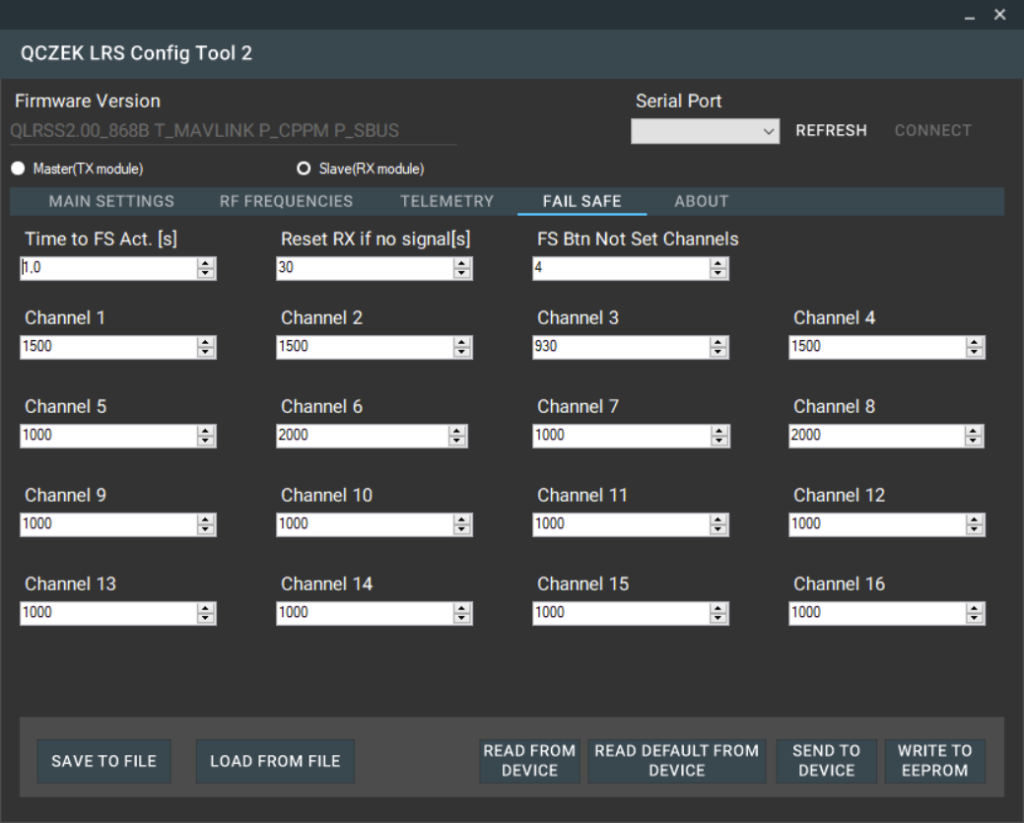
Очень непонятная логика)) 6 и 8 канал на 2000. Хотя одного канала газа 930 хватит для определения фс контроллером
Все таки не до конца понятно. Если выключить передптчик, то через секунду установятся каналы в эти значения, а в течении секунды каналы будкт оставаться в последнем положении?
Смотрим у автора
По-моему это уже изменённые, не по умолчанию.
Однозначно измененные.
Всем так лень смотреть дефолтные настройки? А в чем смысл данного вопроса?
Смысл такой. Если лететь в акро и в течении этой секунды канал крена например замрет на эту секунду, то коп может накрутить пару оборотов. Я поставил акротренер с углом 45гр навсякий случай. Соответственно повторю вопрос для тех кто знает:
Все таки не до конца понятно. Если выключить передптчик, то через секунду установятся каналы в эти значения, а в течении секунды каналы будкт оставаться в последнем положении?
Еще раз повторяю, все зависит от того как приемник коннектится к полетнику. Вариант 1. Через S BUS. После наступления FS - полетнику пофиг какие у вас там значения. Он отключится от приемника. Каналы скорей всего будут иметь последние значения, что были перед FS, полетный контроллер получил флажок FS и приемника для него - нет. Вариант 2. По PPM . Тогда каналы примут значения , что Вы назначили для Lora. Ардупилот ведет себя так. Я не исключаю , что другие полетники и софт могут вести себя по-иному.
Согласен не уточнил, СБАС. Давайте по полкам.
- Отключаем передатчик, канал крена 2000. Вернее последнее значение переданное передатчиком
- Приемник лоры ждет 1 сек, что он передает по сбас в этот момент? 2000?
- Приемник лоры ставит флаг ФС, дальше ясно и понятно
В настройка полетниках есть настройки, как вести себя во время длительного пропадания сигнала.(есть еще и короткий, что возможно при помехе, например). Для Ардупилот - точно есть, для Inav - не помню. При получения флажка по SBUS о том , что наступил FS , что там думает приемник это уже контроллер не интересует. Для контроллера приемника - нет. Начинает крутится алгоритм отработки FS. Там что прописано у Вас. Возврат, домой , посадка и тд. Никаких сигналов и команд, с приемника полетник не получает до прихода флажка о том, что связь восстановлена и режим FS больше нет. Что он дальше делает, или продолжает выполняться команда, что была при FS, пока Вы тумблером не переключите, или запускается режим, что включен на передатчике - возможны варианты. Тут , видимо Вы имеете в виду, что режим FS наступает не сразу (особенного длительный), а спустя - какое-то выставляемое время. Например 2 секунды. И вопрос касается именно того, что делает аппарат в эти, скажем две секунды? Про Inav точно не скажу, а ардупилот включает режим стабилизации в горизонт. Для самолета - полет по кругу, для коптера - по моему режим зависания в точке. И потом, если за это время режим FS не отменен, то выполняются команды, прописанные для FS. Ну и пример вот мой. Приемник к контроллеру коннектится через SBUS(PPM почему то у Лоры не пашет, хотя контроллер его понимает. Причину так и не выяснил.) На канале стоит , что при FS значение установить 1500(отвечает за выставление камеры в горизонт) . При FS камера замирает там, где ее настиг FS. Хотя прописал просто проброску канала без вмешательства, но ардупилот игнорит это. Для того, чтобы в горизонт камера вставала, пришлось взять напрямую сигнал с Лора и воткнуть его в подвес. Вот так - все пашет. Как Inav будет это отрабатывать - надо глянуть.
Вот как раз вопрос в том, что происходит в эту секунду и две, как настроено в лоре.
Меня не интересует что происходит в полетнике, интересует какие кокретно сигналы лора передает в эти секунды до ФС.
Придется наверн осциллограф доставать.
Она передает то, что настроено в таблице FS. Но полетнику на это нас…
Как раз интересно что в полетнике происходит. Ьыла стабилизация. Флаг ФС. До “Круга” две секунды…
Вот как раз вопрос в том, что происходит в эту секунду и две, как настроено в лоре.
Меня не интересует что происходит в полетнике, интересует какие кокретно сигналы лора передает в эти секунды до ФС.
Придется наверн осциллограф доставать.
Ага . И еще что- нибудь. Хотя можно просто одной строчкой в скрипте узнать - get_pwm(номер канала с 1 и до…). И на экран вывести gcs:send_text( 0 , tostring(get_pwm(номер канала ))
Мое предположение: при отключение передатчика значение канала будет оставаться на последнем значении перед FS.
Как раз интересно что в полетнике происходит. Ьыла стабилизация. Флаг ФС. До “Круга” две секунды…
Я же написал. Самоль на круг встает, коптер похоже зависает в точке. Но за 2 сек хрен что поймете.
Меня не интересует что происходит в полетнике, интересует какие кокретно сигналы лора передает в эти секунды до ФС.
Последние принятые, по крайней мере у меня. (настройка с задержкой по FS 2 секунды. ) Меня нисколько не напрягает этот момент в течении нескольких лет.
Меня особо тоже. Но интересен момент, почему Лора не хочется связываться по PPM с Пиксом, в то время как обычные приемник с PPM выходом или декодером Пикс прекрасно понимает. По S BUS проблем никаких нет.
Придется наверн осциллограф доставать.
а разве в S.bus реально посмотреть длительность импульса по каналу?
Тут вопрос по другому ставить надо. А зачем смотреть? Все равно контроллер в данном случае игнорит все.
Во-первых, автопилот перейдет в режим кратковременной отказоустойчивости ( FS_SHORT_ACTN ), когда он обнаружит потерю сигнала более чем на FS_SHORT_TIMEOUT сек. Настройкой по умолчанию для кратковременной отказоустойчивости является круговой режим.
А что он будет делать fs_short_timeout? В этом вопрос.
Во-первых, автопилот перейдет
Нужно говорить какой, у вас речь про арду - так ведь?