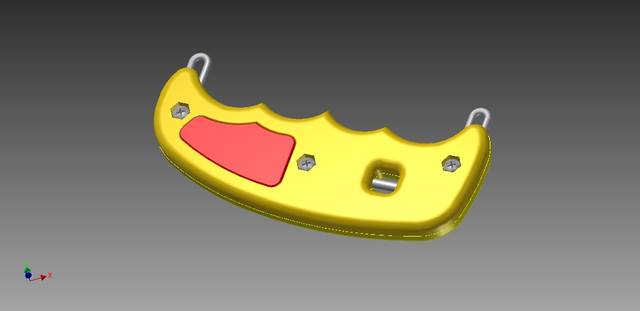
Ручки управления

There is an adjustment mechanism inside the handle.
Внутри ручки есть механизм регулировки.
M5 thread, 16-5-5 ball bearing, coin, nuts, wire, etc.
Резьба М5, шариковый подшипник 16-5-5, монетка, гайки, проволока и т. Д.
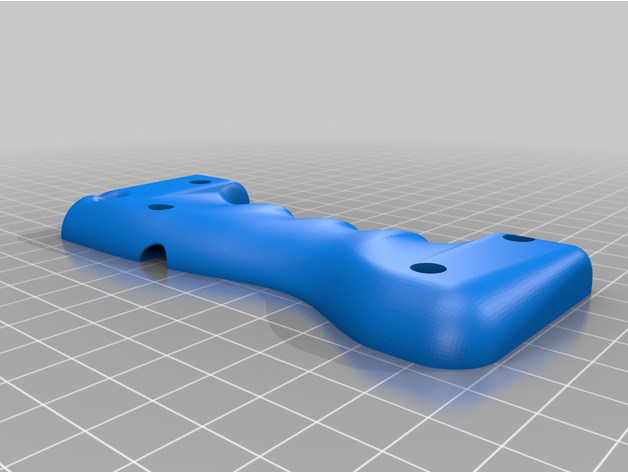
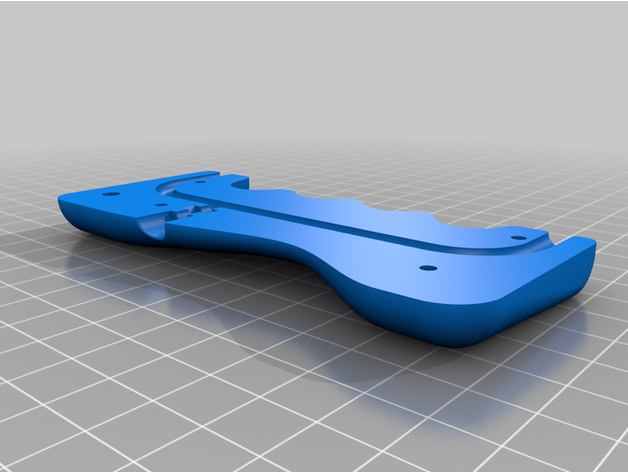
3D printed parts from Shapeways are only the plastic parts! No wire, ball bearings, etc.
3D напечатанные детали от Shapeways - это только пластиковые детали! Нет проволоки, шарикоподшипники и т. Д.
Вы можете отрегулировать ручку, когда вы летите модель
You can find and modify the plastic parts on OnShape.
Free CAD program online: http://www.onshape.com
Search for “Viking Handle”
Вы можете найти и изменить пластиковые детали на OnShape.
Бесплатная программа CAD онлайн: http://www.onshape.com
Поиск “Viking Handle”
Andre Bertelsen working on the Viking Handle in OnShape
Андре Бертельсен работает над ручкой викингов в OnShape
/Henning
Вы можете отрегулировать ручку, когда вы летите модель
Васильков за такую снимет. 😃
“Viking Handle” at F2D World Championship 2018, France
(Audrius #1 – André #3)
«Ручка викинга» на чемпионате мира F2D 2018, Франция
(Аудрюс № 1 - Андре № 3)
/Henning
Ручки управления китайского пилотажника, фото взяты с фэйсбука.








Да! тут ручки такие,что затмевают модели…😎😒
и это неплохо- а отлично!Контакт с моделью весьма значим.Имхо
Ручки управления китайского пилотажника
по весу чувак из Китая ваще не заморачивается 😁
такое количество металла)))))))))
Раньше китайцы вроди вообще без ручек летали…
вообще без ручек летали…
Как это? Один корд в одной руке, второй - во второй?
вообще без ручек летали…
Вот это жесть)))
А вы не заметили , такую вещь, что один раз настроив ручку, в остальном ее настройки больше никогда не меняются.
А все эти супер ручки с кучей регулировок, нужны только для того чтобы найти лучшее положение.
Отсюда вывод, что нет смысла копировать ручку великих, так как она настроена под определенную руку, и систему управления модели.
А современные модели, можно отрегулировать под любую ручку, даже под деревяшку со шнурками.
Раньше китайцы вроди вообще без ручек летали…
Изобретатель управления кордовой модели с помощью качалки, Джим Уокер, летал так что корды были в обоих руках. Это видно на самом первом фильме запечетлившего полёт кордовой модели:
Как это? Один корд в одной руке, второй - во второй?
Читал, что корды цеплялись к кольцам на пальцах.
Читал, что корды цеплялись к кольцам на пальцах.
Так можно успешно летать на более менее небольших моделях, скажем так среднестатистическая 7 кубовая пилотажка для данного варианта это предел, и то без пальцев можно остаться, случаи у нас разные бывают)
Я только констатировал -летали!
Мне рассказывали старые моделисты и я не сомневался ,что говорят правду.
Провёл тут маленький эксперимент по поводу ручек и подвижности кисти ( сам ни разу не кордовик)
ИМХО.
отклонение кисти вверх вниз от вертикали
вверх +15°
вниз -45°
ход ручки получается 60°.
Следовательно нейтраль получается под наклоном вниз на 15° с отклонениями +/- 30°. Накидал схемку

может кого на мысли дельные и наведёт…
Ваша схема показывает откуда берется угол в 15 градусов, на кривой качалке Валентина Саленека.
Но в полете вы не держите руку под таким углом, да и это не удобно.
Отклонения рулей ограничины ходом качалки, а не ручки.
В полете вы рулите не только кистью, но и всей рукой. Самолет всегда пытается уравновесить положение вашей руки, т.е. Пошла ваша рука вверх, самолет последует за ней, пошла рука вниз, самолет так же опуститься.
А сгибая руку в локте вы можете задать ещё больший угол отклонения ручки, по отношению к самолету, чем кистью.
Ограничителем во всем этом безобразии положения руки, выступает качалка.
Ваша схема верна для идеально ровной системы, но в жизни всё не так.
Возьмите в руку карандаш и зажмите его в кулак, он будет почти перпендикулярен руке, а отклонения кисти так и останутся +15 и -45.
Если быть более точным, то отклонение карандаша, от перпендикуляра к вашей руке составит порядка 5 градусов, в нейтрале, о чем свидетельствуе всегда более длинный нижний поводок на ручке.
то отклонение карандаша, от перпендикуляра к вашей руке составит порядка 5 градусов,
Это наверно у вас так. Зажал маркер (он потолще) и у меня не получилось 5 градусов. 😉😃
Угол больше гораздо. Ближе к 15. И на вытянутой руке именно все так как и отметил Роман.
Ваша схема показывает откуда берется угол в 15 градусов, на кривой качалке Валентина Саленека.
Никогда не применял такую качалку. Да и многие тоже. И мы говорим о системе управления которая включает комплекс факторов, где рука не последний. И ее регулируют так чтобы добиться нужных параметров управления.
Зажал и маркер и ручку (полетную) ну никак 15 градусов у меня не получается, ни в правой ни в левой руке …
И тут даже дело не в наклоне руки изначально, а в том что в расслабленном полетном состоянии, как не крути кисть вверх и вниз ходит с разными углами. Вниз всегда больше.
И летать с постоянно наклоненной кистью вниз, так чтобы ход в обе стороны был одинаков, у вас не получиться, рука всегда будет напряжена и это будет пытка.
Вы посмотрите ручку Колесникова, в начале темы, найдите фото ручки В. Саленека, там нет наклона в 15 градусов. На фото ручки Саленека, можно заметить, что нижний поводок не на много длиннее верхнего.
Так же хочу заметить, что рассматривать ручку, в отрыве от качалки и системы упарвления моделью, не правильно, все регулировки ручки задуманы для того, чтобы найти то комфортное соотношение ручки с системой управления модели, а не с кривыми руками пилота.
И если вы на всех моделях используете одну и туже качалку, с одними и теми же плечами, то и настройки ручки вам менять не придется.
рассматривать ручку, в отрыве от качалки и системы управления моделью, не правильно
Полностью согласен. система управления должна рассматриваться в целом, вместе с рулями. но это в теории, а на практике…
про соотношение плеч рычагов нашёл в книге “Модели-копии самолётов.” Тарадева Б.В. на 74 стр.
Не совсем, вы меня поняли, рули их углы отклонения и площадь, это совсем другая и очень обширная тема.
А вот рассмотреть полет модели с качалкой и ручкой от бойцовки и с качалкой и ручкой от пилотажки, было бы интересно.
Размер бойцовых качалки и ручки 55мм и 90мм соответственно, у пилотажки возьмём качалку и ручку 90мм и 100мм.
Вот пусть знающие люди обьяснят, почему так, а не иначе. И тогда будет более понятно на что влияют все эти крутые настройки ручки.