Activity
Камера только спереди и снизу о других сенсоров предметов ни слова. Помеха может быть как минимум еще с 3 сторон, как пример, я иду в сторону коптера, по идее он должен лететь “назад”.
Разработчик отвечает, что если вы видите что препятствие неизбежно на пути квадра, нажмите центральную кнопку на пульте и девайс зависнет в данной точке. Только потом то что…
Мне видится это главной проблемой, неумение обходить препятствия. Продукт преподносится как “летающая камера для сэлфи” для людей далеких от управления ЛА, по сути только кнопка вкл/выкл. И нештатных ситуаций может быть масса, а если на пути будут люди? Если потеряет уверенный прием GPS, если порыв ветра?
То есть в идеале, использовать в поле, где никого нет кроме тебя, но ведь будут же запускать в городе, на мероприятиях и тд…
Кто-нибудь видел такой комплект дешевше? Или лучше по одному брать?
К примеру это
hobbyking.com/hobbyking/store/uh_viewItem.asp?idpr…
+
hobbyking.com/hobbyking/store/uh_viewItem.asp?idpr…
Будет около 50. Без доставки, правда.
ОФФ.
Коллеги, а где купить PLS вилки угловые с 3-мя контактами? Хочу перепаять на АПМ гребенки.
Эти что ли?
www.ebay.com/itm/…/221465704416
Добавлять комплектующие в базу прямо из калькулятора - отличная идея, мне только видится проблема в разном обозначении одного и того же мотора, к примеру DYS 1806 или DYS BE1806 или DYS BE1806 2300KV, то есть точно будут вводиться дубликаты.
Насчет публичной оценки расчета, не понятно как оценивать. То есть автор расчета ставит правдивость данных? А если не совпало, ведь не обязательно в комплектующих проблема. Даже если в них, ведь неизвестно в чем именно
Из предложений, я бы добавил возможность выбора популярных рам. Вместе с этим можно сохранять и показывать рейтинг наиболее удачных конфигураций к этим рамам.
первый мотор отлично, второй тоже без проблем, третий еле крутится, четвертый крутится с небольшим треском.
Это в каких моторах такой процент брака? Baby Beast?
Выдает что мотор перегружен, или то что срыв потока и невозможно рассчитать?
Да, предупреждение о перегрузке мотора. Замена пропов на 6х2 позволяет рассчитать. Другой калькулятор (www.ecalc.ch/xcoptercalc.php) выдает примерно такие же результаты.
Калькулятор считает что великоваты эти пропы для движков rc-calc.com/c/faYXLR
Думаю с таким же конфигом взять hobbyking.com/…/__58091__6020_Carbon_Fiber_Propell…
Там ошибка на сервере. Страница с результатом расчета выдает 500 (Internal Server Error). Надеюсь, автор починит…
А на групсах народ, не дождавшись новых прошивок от Evvaldis, стали свою клепать.
Более того, автор как то странно отреагировал на критику кода и закрыл тему. Есть отдельный топик экспериментальной прошивки? Бегло прошёл по темам, не нашел.
Я исхожу из принципа “не ломай то, что работает”.
Вот лично в моем случае, попытка перешить плату при установленных кривых драйверах с высокой степенью вероятности привела бы к запоротой прошивке и необходимости сейчас паяться к контактным площадкам и перешивать лоадер. Примеры такие в ветке есть.
Что это за легенды еще такие?
Во первых, рано или поздно софт новый надо будет ставить, вы с этим не согласны? Так может сразу этим заняться?
Слетит софт из за кривых дров? Это что то новое. Я конечно не знаю какие там проблемы бывает, но у меня обычно или шьется или не шьется.
Паяться к контактным площадкам? да разъем же есть.
Если в плате точно есть прошивка - то все наоборот. Сначала нужно что бы фтди заработал, это проще определяется через ГУИ
Интересно, как же это проще определить в гуи? Я исхожу из того что плата - это кот в мешке. Не известно работает ли ftdi, установлен ли бутлоадер и прошивка, а так же версия прошивки.
Так вот гуи будет вам врать в 3 из 4 возможных случаев, и если не ошибаюсь, для гуи критична версия прошивки. Так что не зная работает ли у вас ftdi и что там а прошивка, можно сколько угодно строить предположения в чем же причина.
Если же отталкиваясь от варианта что нужно сначала прошить тем что необходимо все варианты неисправностей будут отброшены по порядку.
Например, выясняем правильно ли установлен драйвер ftdi (при условии что появляются ком порты): пытаемся шить, смотрим на плату, если при прошивке мигают светодиоды rxtx, отлично, значит ftdi исправен.
Получаем ошибку в IDE? - гуглим этот вариант ошибки.
Но мне как бы перепрошивка вторична, если конфигуратор не работает.
Вот это в корне не верный подход. Из ваших сообщений вообще не понятно что не работает. В первую очередь нужно добиться возможности прошивать плату через Arduino IDE и только потом пытаться что то настраивать через конфигуратор.
Должна быть причина или перечень ОС на которых гарантированно работает или гарантированно не работает.
Никому ничего тут не должно, тем более никаких гарантий вам никто не может дать. Причин, по которым у не устанавливается драйвера или соединение с платой очень много и они не ограничены операционной системой и версией драйвера.
И где ее лучше заказать?
www.goodluckbuy.com/evvgc-3-a...ontroller.html
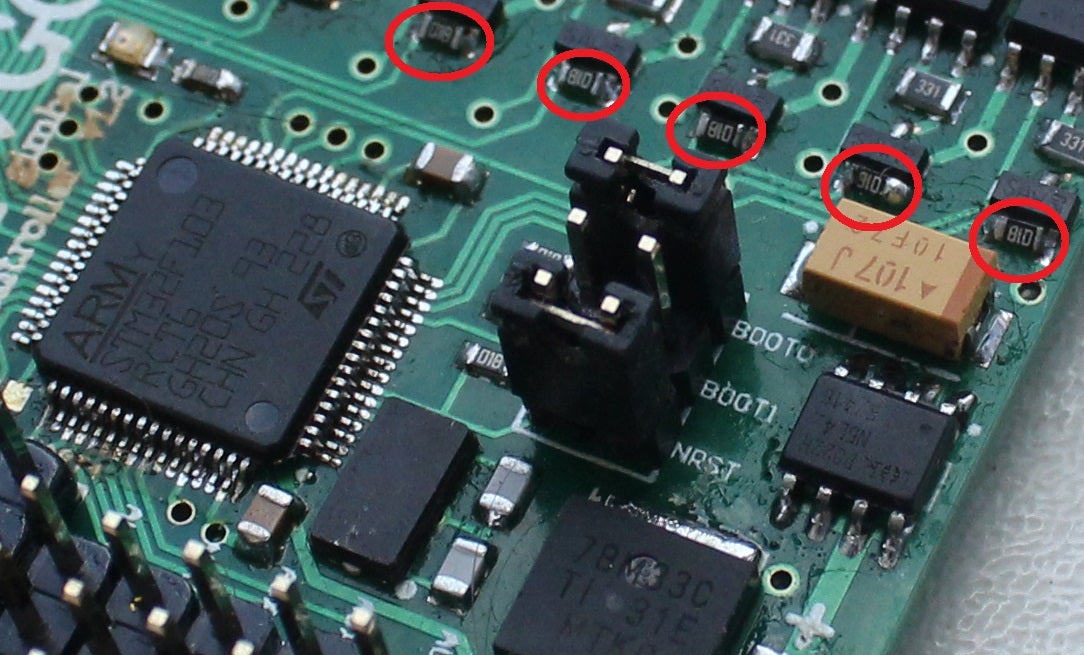
С ГЛБ пришла на удивление быстро (18 дней обычной почтой), но месяц назад они отправляли без подтягивающих резисторов (www.rcgroups.com/forums/showpost.php?p=25275608&po…), ерунда, но точно на “получил-включил-работает” не подойдет.
Танцы с бубном на 4 компьютерах результата не принесли, шьётся только 48 прошивка
А через ардуину шить не пробовали?
можно по шагам, как в adruino переписать загрузчик. Спасибо
Да какие там шаги, одна кнопка.

Что-то искал, не нашел в наличии нигде…
Подскажите.
Можно взять ненужный hdmi, старый d-sub, некоторые юсб кабели экранированы. распотрошить, вытащить ненужные жили или оплетку надеть на свой кабель
В конце концов взять

я просто им завидую,
Вы так же хотите выезжать в другие страны на заработки жить в строительном вагончике и есть доширак на завтра обед и ужин ? Но не стоит об этом.
Что именно не получается? Плата определяется, ком порт появляется? Если появляется, то какую ошибку выдает при прошивке?
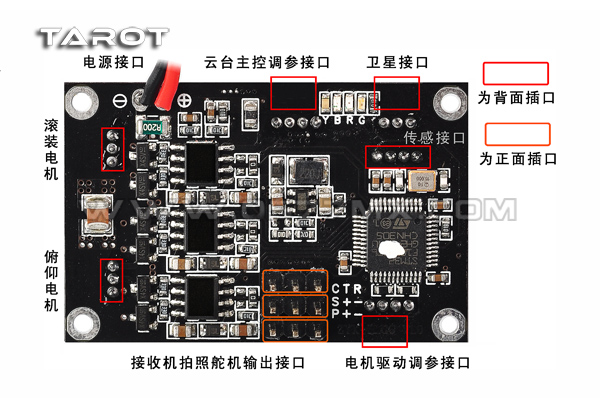
А как правильно датчик расположить
вниз элементами, разъемом назад. то есть стрелка будет показывать вправо
Конечно раньше это было , споров тут нет, но практически не применяется в нашей среде да и вообще.
Конечно не применяется. В рамках этого хобби компьютер всего лишь инструмент, как отвертка или молоток. Если не умеешь пользоваться клеем, то зачем браться за склеивание модели? И к тому же почти любая настройка, будь то подвес или контроллер ЛА сопровождается проверкой работы этого устройства. Настроил ПИДы на глазок, запускаешь, и что потом? Спрашивать владельца контроллера как он там работает и не нужно ли еще подкрутить? Так если владелец не понимает принципов этих настроек то он не сможет адекватно прокомментировать работу устройства. Ставить веб камеру, по которой контролировать работу устройства? Да нюансов масса, может у него подвес кривой или работе двигателей что то мешает, а ты будешь с пидами возиться 2 часа. И самое главное кому это нужно? Вместо того что бы самому попытаться разобраться как это все работает, узнать что то новое, получить опыт, будет задействован еще кто-то, который так же не получит никакого опыта в процессе настройки, так как он это уже делал.
з.ы. HK слоупоки, даже свою разводку не сделали.
Но это в перспективе пойдет широко и это не за горами. Главное иметь хороший канал и защиту на нем достойную.
единый рабочий стол в инете - это огромная перспектива для решения многих вопросов. Мало кто этим пользуется…но это стоит внимания
Это в массах с рюшечками лет 5 уже. teamviewer зовется. Вопрос не в технической возможности, а кому это надо? Никаких особых знаний для настройки подвеса нет, достаточно посмотреть видео, почитать несколько страниц форума. Правильно, проще же крикнуть “Хэлп, ничего не получается, поможите люди добрые!!”. Про защищенный канал - не иначе бронированный кабель нужен ?😃
К сожалению не продается и не продавался. Висит, уже давненько и исключительно в предзаказе. Пульт у него интересный.
У этого пульт обычный, он же не FPV. просто камера, записывающая на микро СД карту.
перечитал пару раз но так и не понял куда вносить параметры? как именно надо перепрограмить и внести свои показания.
code.google.com/p/arducopter/wiki/AC2_Current
Даже читать ничего не нужно, все понятно по картинкам 😃

но кажется на обратной стороне нет ничего.
Как это нет. На этих фото плата с разных сторон
Но чо за контроллер так и не нашел. И кстати, а где блочок гиро+аксель?
Расстраивает отсутствие регулировки центровки.
Контроллер неметский, разводка Мартинеса (да в общем то какая разница, какой версии там печатная плата)
Зачем центровка, если подвес рассчитан под определенную модель камеры?
Какой же проц они впихнули?
Processor: Dual 32-bit high-speed ARM core processor
Мой коптер с Х4 контроллером при полном весе 4500 грамм летает 37-40 мин но я не пишу об этом на каждом углу и не делаю сто тысяч мильенов видео. Потому что любой кто здраво думает и анализирует соберет тоже самое.
Так напишите! Я так понимаю вы ратуете за открытость? Так флаг в руки, распишите свои достижения, все в подробностях, что бы каждый кто не хочет/не_может долго разбираться в теме смог повторить. Что вы привязались тут к его контроллеру, топик хоть и называется так но в основном был о другом совсем.
народ, а что это за новая плата с названием NEW?
Она получается дешевле чем V3 от немцев
Это плата AOI brushlessgimbal.de/brugi-v1/brugi-aoi/ Это скорее наоборот, старая. Схема немного упрощена, светодиодов нет, вместо предохранителя используется низкоомный резистор. А цена… всем этим платам цена 30 баксов 😃
Да, и этот лот предлагают без IMU, вот и дешевле.
но стоило ему подняться выше башни он гад начал вести активную беседу с внешней точкой на крыше и забил управление, но не полностью. он зажал канал влево и квадрик боком попер
А разве такое может быть? То есть там же просто частотная модуляция (или как это назвать). Все каналы управления передаются на 1 частоте и даже какое то шифрование присутствует.
Так компилируется долго или заливается? Мощность компа на заливку не влияет, важна скорость порта, когда заливал на ALL IN ONE PRO Flight Controller v1.0 через штатный USB разъем прошивка была долгой, не 10 минут конечно, но полторы-две минуты. После того как usb разъем успешно отломался, стал заливать через ftdi адаптер (кажется шел в комплекте с minimOSD), время уменьшилось до 40 секунд.
ВКЛЮЧИТЬ КВАДР - ВКЛЮЧИТЬ ПУЛЬТ!
Ну вот зачем такие советы? Во первых для калибровки это не нужно, ошибка dissident в том что не перевел в expert. Во вторых, это должно быть на уровне инстинктов, ВСЕГДА включаем сначала пульт, потом ЛА, выключаем сначала ЛА потом пульт.
я тоже думал подвесить всё на резинки(демпферы), но потом задумался - какой вес выдерживают эти демпферы ???
Если их сделать на сжатие то любой

Конкретнее можно, где об этом инфа? Ссылку. А то пока такой инфой не распологаю. Но система крайне заинтересовала.
www.rcgroups.com/forums/showpost.php?p=25275608&po…
Решается достаточно просто, припаиванием 9 резисторов от 1 до 3 кОм
Стоит отметить что этот проект на STM32 и мосфетах, что отличает его нет некоторых других.
Схема еще корректируется, вот недавно автор обнаружил в версии платы 1.2 ошибку, из за которой горят транзисторы.
Нашел на просторах интернета. Только фото. На крайний случай когда время свободное будет хочется попробовать сделать что получится.
Это фото из проекта DIY Multicopter brushless motor
HK демпингует hobbyking.com/…/__37328__ArduPilot_Mega_V2_5_Fligh… $71.71
По питанию похож на 2.5.2 из поста ранее

А ни у кого коптер не уплывает (с точки сбивается сильно) в режиме loiter, если быстро по yaw крутить?
Мне кажется это связано с центром тяжести рамы. При крайних движениях стика yaw противоположные двигатели останавливаются. Например когда у меня центр тяжести был смещен назад, то при повороте коптер резко просаживался назад и в сторону поворота
Вопрос в том принимает ли ардупилот управление по мавлинку (через модемы xbee или 3DR)?
Ну раз есть управление джойстиком в планере, как то управлять через мавлинк можно. Но мне кажется что полноценно управлять через 3dr как то менее надежно.
Так покупать то можно в разных местах )
www.ebay.com/sch/i.html?_nkw=433mhz antenna&_sacat…
А что мешает внести коррекцию в коде при наклоне аппарата? (геометрия сила )
В собственном софте? конечно же ничто не мешает, уверен что это достаточно просто. Я то думал что речь об использовании Ардукоптера от разработчиков, в котором сонар должен быть установлен вниз, а не под каким либо углом.