Activity
Владимир, принципы ремонта РЭА общие для всех видов техники - маниакальный осмотр на предмет повреждения SMD компонентов, дорожек печатной платы, шлейфов, “прозвон” всего что можно прозвонить - обмотки двигателей, проверка функционирования датчиков Холла в отдельности, проверка питающих напряжений ( полезно зарисовывать упрощенную схему, так как схем на подвесы нет в сети). Вообщем, проверка всего, что можно проверить с помощью подручных приборов. Если все это не дает результата, остается самый эффективный и быстрый - диагностика методом замены узлов на заведомо исправные.
Не знал, что китайцы наконец-то выпустили шлейф. Я ждал от них это еще года 2 назад. )
Владимир, прозвоните тестером шлейф, причем, если в статике будет звониться нормально, стоит также попытаться изгибать шлейф у основания контактов и смотреть не пропадает ли контакт.
Привет Денис! Огромное спасибо за такой качественный экскурс в кишки повеса. Zenmuse H3-2D стали появляться в продаже недорого на ибее и барахолках. В живую не игрался с фантомом, а по вашему описанию непонятно, как идёт управление подвесом. У меня отлично летающий X380, подвес модернизированный tarot zyz22 ,ужасная дрянь. Ничего не герметизировано, платы все открытые, особо противно приклеиваемая снизу плата акселерометра. Пытался заменить корявые провода на ленточные шлейфы, да место даже не предусмотрено. В конце концов сплёл косы из тонкого мгтф и более, менее наладил его работу.
Можно ли подвес Zenmuse H3-2D Приспособить к стороннему квадрику? По каким шинам он управляется? Настраивается ли отдельно? Для меня достаточно просто управление одним наклоном в полёте.
Виктор, благодарю за отзыв! Целиком зенмус можно поставить на самодельный коптер, используя электронику DJI, но для меня такой вариант был не очень интересен, я выкидывал все мозги DJI и устанавливал электронику от alexmos. Механическая часть родная, только моторы перематывал, подробнее можно прочесть в комментариях к части 1 - rcopen.com/blogs/125836/18640
Включение и выключение записи, а так же регулировка угла с широкого на средний была бы ограмадным подспорьем при художественной видеозаписи с воздуха…
Так какие все таки функции управления гоупро через задний разъем испльзуются в DJI Zenmuse?? Неужели только подзарядка?
Насколько помню, в двухосевой версии через задний разъем снимается видеосигнал и идет подзарядка АКБ камеры. Даже если бы DJI вывели конфигурацию камеры через контроллер подвеса, то непонятно как этим всем можно было бы управлять - ГУИ программы подвеса очень примитивное, а оригинальный пульт имеет минимум органов управления. Скорее всего DJI пошли по пути минимального оснащения функциями, то что крайне нужно при съемке.
Можно по подробнее про данный факт? Моторы перематываются, где можно почитать?
Алексей, посмотрите этот пост
Вообще, для БК подвесов можно использовать моторы капстан от старых видеокамер, видеомагнитофонов, блоки вращающихся головок, шпиндельные моторы CD-ROM, ZIP приводов и многое другое. Зависит только от задачи - какую массу стабилизировать и конструктивные решения по креплению того или иного мотора. У моторов капстан (двигатель протяжки магнитной ленты) зачастую стоят планарные бескорпусные катушки, здесь в зависимости от сопротивления нужно подбирать управление таким БК мотором. Для сопротивлений обмотки от 8 Ом и выше подойдет любой контроллер Alexmos или его аналог.
сломался штифт 1-ого мотора (вообще я в шоке конечно что он сломался ТАМ).
Михаил, насколько я понял на фото у вас ось тангажа, это не штифт сломался, а ось двигателя. Там ось 2 миллиметра ровно. Это теперь либо искать ротор мотора из доноров, либо выбивать этот кусок вала и вставлять новую ось и стачивать на ней плоскость под потенциометр. Да и проверьте потенциометр - они от таких ударов любят ломаться на резистивном слое. Вообще, конструкция у зенмусов несмотря на литые детали достаточно хрупкая.
Добрый день
Может быть сталкивались - непонятная проблема
Подключил подвес, включаю питание - подвес встает в горизонт, держит несколько секунд, потом отпускает камеру. Потом опять ставит гориизонт, опять отпускает. И так несколько раз. В итоге нормально так и не встает.
Помимо этого камера и плата за ней очень сильно греется.
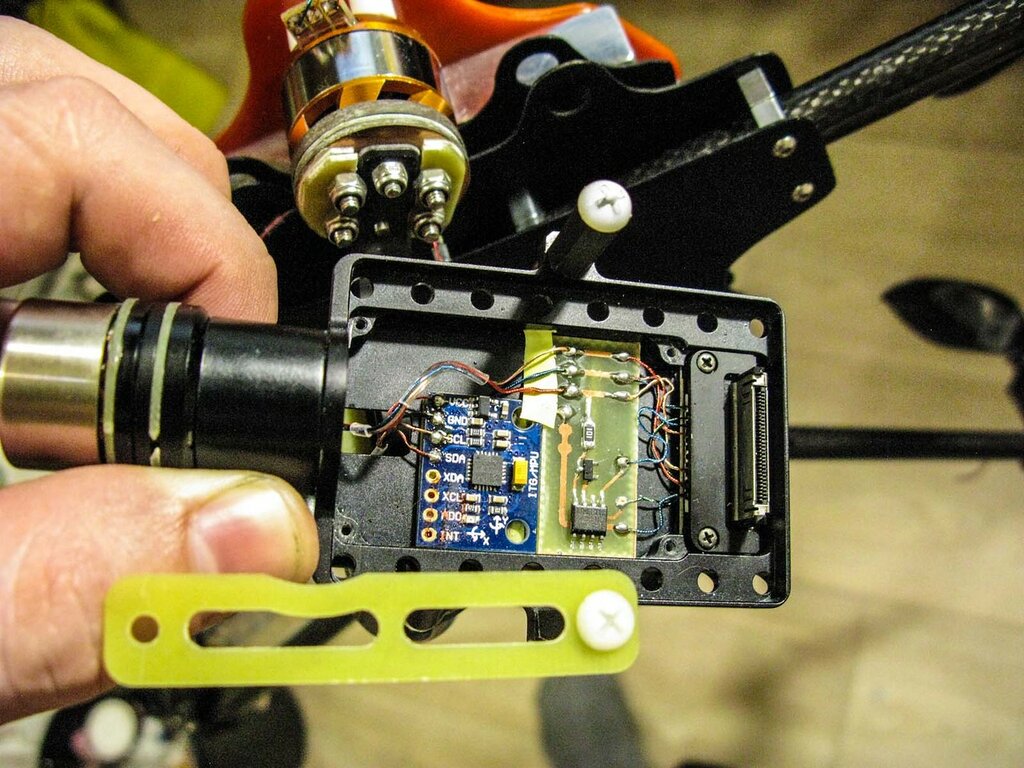
Здравствуйте Михаил. В случае такого и другого дефекта я бы начинал проверку с исправности функционирования датчиков Холла, целостности шлейфа ( желательно его прозванивать не в статичном режиме, а изгибая - бывают трещины в дорожках которые проявляют себя только в движении), осмотр на наличие посторонних предметов ( шариков припоя), механических повреждений элементов - их скол, отрыв от печатной платы, следы коррозии от попадания влаги, деформация печатной платы, сопротивление обмоток двигателей, легкость вращения валов двигателей, состояние переменных резисторов обратной связи на печатных платах обеих осей.
Вообще, что касается неисправностей, когда виновник не найден - единственный эффективный вариант, это диагностика методом замены узлов. К сожалению китайцы так и не делают запасные неоригинальные шлейфы на Зенмусы, хотя для них это копеечное дело. Фирма DJI также не предоставляет в виде ЗиП плат-драйверов подвеса, основного контроллера, что говорит о желании этой фирмы заставить клиентов в случае любой поломки покупать новый подвес ( это кстати основная причина по которой я стараюсь не пользоваться продукцией DJI). Поэтому в случае серьезных поломок остается искать донор-подвес без каких либо гарантий.
Добрый день Денис.
Не сталкивались вы с такой проблемой?
Включил питание гексы. Откалибровал компас. Подвес встал в горизонт. Все работает хорошо. Но забыл включить камеру и принудительно повернул ее вверх включил gopro и подвес обратно не стабилизировался. Изображение передает камера заряжается. а моторы молчат. В асистенте подвес то определяется то нет. И наверху гже светнуть закрыть программу чуть левее появился значек замочек. При включении коптера Led моргает постоянно красный. Что делать не знаю.
Здравствуйте Константин. Богатым опытом по зенмусам похвастаться к сожалению не могу - вижу их крайне редко, а сам не эксплуатирую подобные изделия. Такого проявления дефекта еще не встречал. Переподключение питания совсем не помогает? Помнится я рукой специально срывал камеру на работающем зенмусе - проблем никаких не было.
Привет Денис. Здесь общаться как то предметней чем в ЖЖ 😃
У меня вопрос истекает из нарастающего недовольства невозможностью дистанционного управления Гоупро, так как все штатные стредства Гоупро работают на той же частоте что и общепринятые приемопередающие устройства. Так вот, имея в распоряжении задний разъем Гоупро и возможности смартпорта от FrSky небыло желания замутить дистанционку для гоупро. снимать когда хочешь, режимы переключать какие хочешь…
Привет Аркадий. Идея вообщем интересная, но я для себя позиционирую гоупро как весьма специфичную вещь - только для видеосъемки и то с поправкой на большую дисторсию. Для видеосъемки настроек менять никаких не требуется - заранее выставил на земле и полетел. Другое дело фото - я некоторое время снимал фотографии на 3/3+ Black, качество вполне неплохое, особенно если освещение нормальное, но отсутствие видеовыхода в режиме интервальной съемки серьезно ограничивает использование, а наличие большой дисторсии из-за сверхширокого угла вообще заставляет снимать особым образом, стараясь не опускать камеру по тангажу. Можно конечно заменить оптику с более узким углом, но цены кусаются. Видеовыход можно заставить работать - насколько я помню снимая в режиме одновременно видео и фото по кнопке спуска, только там не работает режим протюн, кроме того для меня режим интервальной съемки удобнее, ибо снимаю один, а кадрировать и спускать затвор удобнее с оператором. Что касается реализации управления Gopro через протокол FrSky, здесь по идее нужен программист, я таковым не являюсь. 😒
Чем красили текстолит? Грунтовался перед покраской или сразу по обезжиру пылили?
Акриловая краска Bosny. Без грунта. Просто тщательно зашкуривал поверхность 160 наждачкой, после мыл с мылом, обезжиривал.
Денис, добрый день! Не нашел нигде информации про магнитометр - пришлось ли его переносить? Строю коптер и как раз на распутье - выносить ли магнетометр “на крышу” или оставить внутри рамы, относительно недалеко (4-5 см) от силовой проводки.
Здравствуйте Константин. Я выносил плату магнитометра и барометра наверх, внутрь корпуса GPS приемника, благо, что у Кролика она очень небольшая. Питание брал от GPS, а шину I2C вел двумя проводами + GND. Еще потребовалось убрать батарейку в модуле GPS, ибо она существенно сдвигала магнитный угол, кроме того, стальной экран на модуле GPS я заменил на самодельный из тонкой меди - тоже снизилось паразитное влияние на магнитометр. Расположение платки магнитометра выбирал опытным путем - закреплял коптер, давал газ и смотрел на изменение магнитного угла в зависимости от положения платки. В идеале, компас нужно выносить сантиметров на 15-20 выше GPS, но это не вписывается в мой дизайн, поэтому небольшое смещение угла на 60% газа имеется.
Я думаю, что в любом случае магнитометр нужно выносить подальше, особенно учитывая, что далеко не во всех контроллерах есть коррекция показаний компаса в зависимости от уровня газа двигателей( как например в APM), да и на такую коррекцию я лично не сильно надеюсь, ибо все же от работы магнитометра зависит - вернется ли аппарат домой в критический момент, поэтому стараюсь сделать все, чтобы снизить наводки на компас.
Приветствую, Денис.
Скажите пожалуйста, а в Ваши руки H3-3D не попадал? Его отличие только в наличии третьего моторчика?С уважением,
Михаил
Здравствуйте Михаил. Трехосевую версию не держал в руках, но теоретически, отличия должны быть как минимум в следующем: дополнительный драйвер третьей оси, отличия в программном коде, также должен отличаться гибкий соединительный шлейф питания и CAN шины.
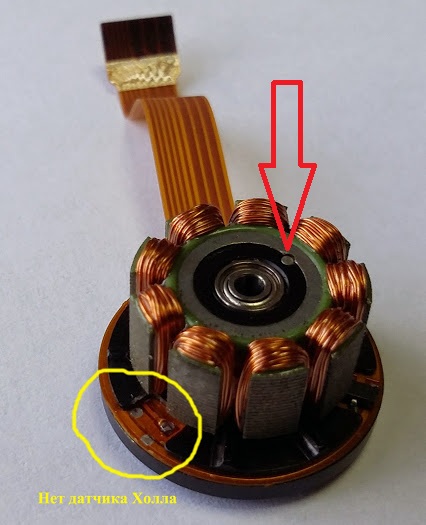
Денис, на плате двигателя расположены три датчика Холла, соединённые между собой тремя круговыми дорожками. Пробовал “прозвонить” дорожки, соединяющие датчики Холла, на предмет обрыва: внешняя и средняя дорожки звонятся, а внутренняя не звонится. Это правильно или внутренняя должна быть тоже соединена? Схемы соединения, к сожалению, у меня нет.
Питание датчиков Холла, естественно общее для всех трех элементов (+ и -), а вот три аналоговых выхода имеют отдельные выходы, иначе не имело бы смысла ставить три датчика. Посмотрите даташит на датчик Холла - Питание должно звонится у всех датчиков между собой, а выход каждого из трех датчиков должны приходить на контактную группу шлейфа.
Здравствуйте Сергей.
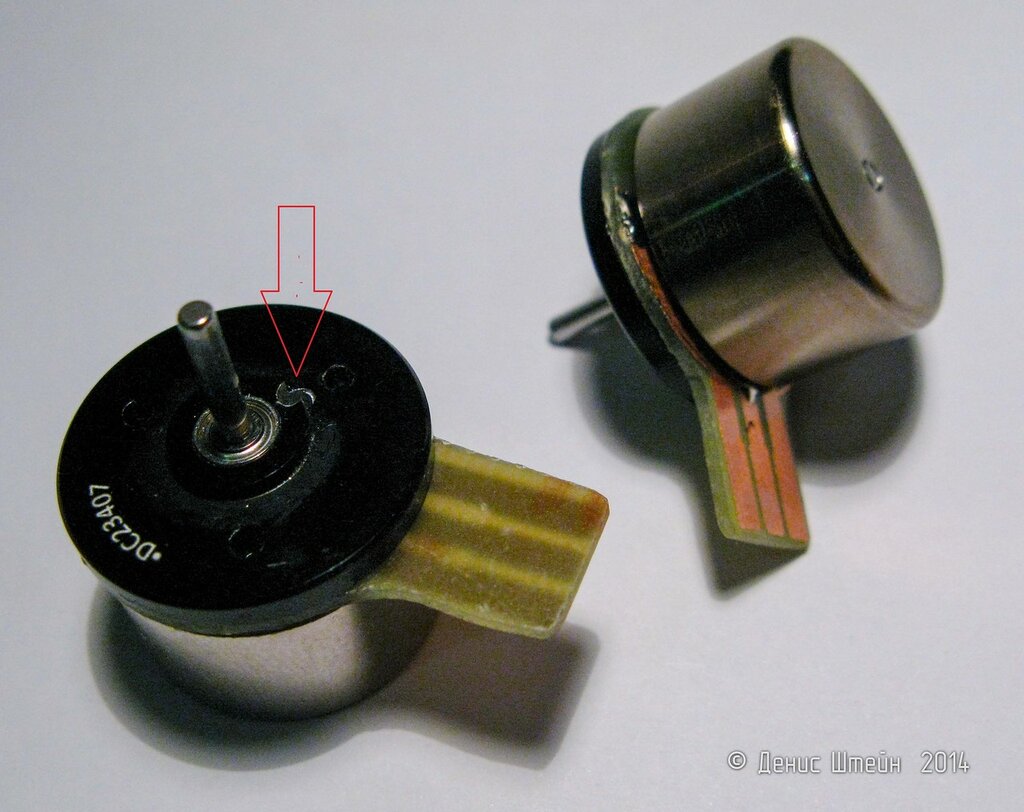
Я впаивал бы датчик Холла без разборки мотора. Разумеется, нужно тонкое жало у паяльника. Если такой паяльной станции нет ,можно взять медный провод 1-1,5мм намотать его на толстое жало и сделать отвод в виде тонкого жала и им припаять.
Если есть желание, двигатель можно полностью разобрать и собрать назад. То ,что у вас указано на последней фотографии желтой стрелкой - подшипник. Его трогать не нужно. Сверлить нужно как раз напротив вала, который удерживает статорное железо от прокручивания. На фотографиях выше место засверливания хорошо видно, продублирую здесь. Сверлить нужно насквозь, через черную алюминиевую деталь с надписью. Когда просверлите насквозь, увидите обратную сторону вала вставленного между статорным железом и алюминиевым основанием. В случае если виден вал, выбиваем его как я писал выше.
- Мотать двигатель нужно по схеме 8 полюсов и 9 зубов AaABbBCcC - здесь картинка www.bavaria-direct.co.za/scheme/calculator/ Но прежде чем мотать, будет нелишним проверить число полюсов на ваших моторах. Зубья на статоре считаем визуально, а вот число полюсов на магните ротора, учитывая, что там монолитный кольцевой манит, лучше всего считать с помощью маленького магнитика. просто подносите и считаете полюса, только начало маркером отметить.
- Если подвес убит не сильно и удастся восстановить, то это будет много проще, чем переделывать под сторонний контроллер БК подвесов. С другой стороны, с контроллером типа алексмос функционал подвеса возрастает просто неимоверно - тем более, что DJI вообще не предусматривает каких-либо настроек для своего детища с оригинальной электроникой.
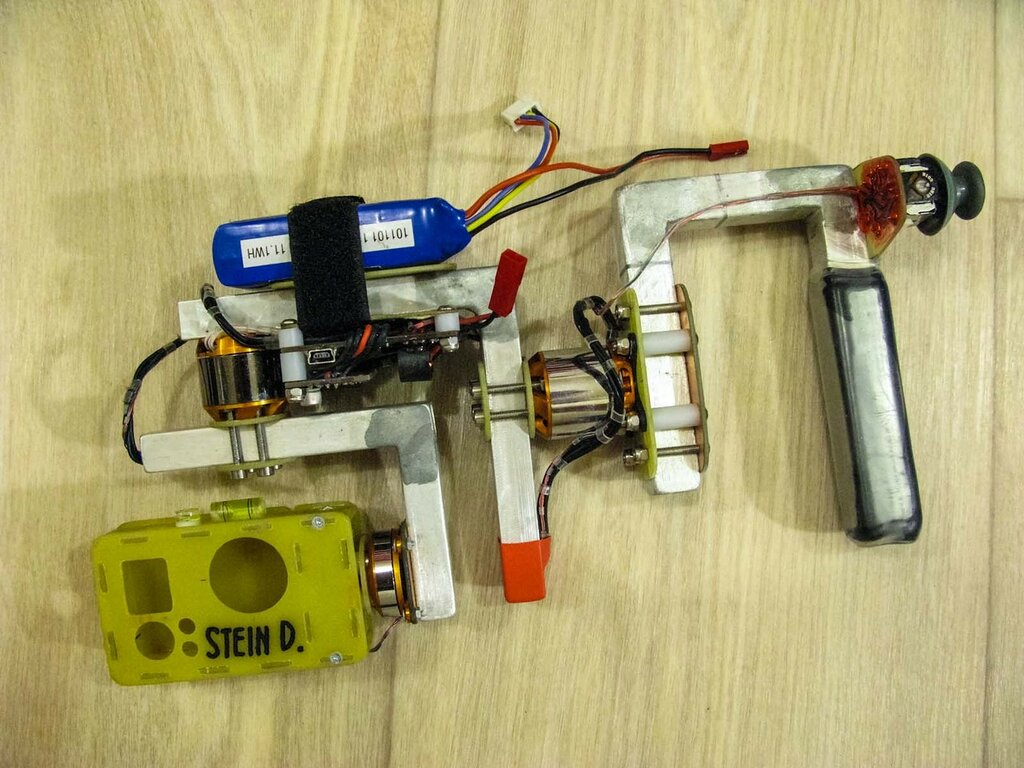
- Фото прикладываю ниже. Подвес установлен на проект типа Stein X4-01.
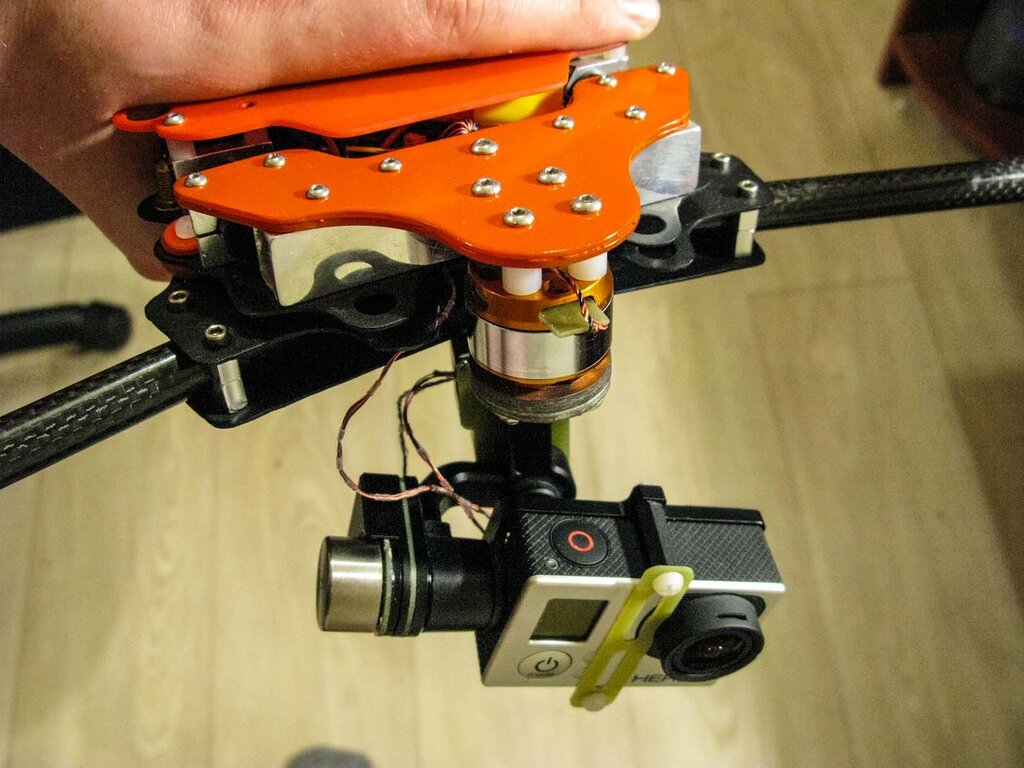
- У RCtimer есть двигатели для мультикоптеров (силовые) типа BC2836. Я купил их очень давно, как только начал заниматься этой темой. Но выяснилось, что эти моторы ( как и многие другие) имеют массу недостатков, в т.ч. очень опасных. Но для БК подвесов это оказался очень удачный вариант в плане монтажа. В итоге, у меня скопилось приличное количество этих двигателей, я их перематываю для БК подвесов. BC2836 имеет самую большую длину ротора (колокола) Но у RCtimer есть другие модели моторов, которые отличаются только длиной ротора-колокола. Поэтому, там где BC2836 был слишком избыточен, я просто брал младшую модель, которая короче по длине и легче и использовал в нужной оси подвеса. Ниже, на фото трехосевого БК стедикама на оси рысканья виден BC2836, на оси крена младшая модель (названия не помню - отличается только массой и длиной), на оси тангажа стоит самый маленький 2204-14 ( около 15гр.) мотор.
Вместо главной платы контроллера Зенмуса ( под гоупро) я установил датчик MPU6050 и плату для обмана гоупро - EEPROM, которая заставляет думать гоупро, что подключен LCD Backpack. В итоге, гоупро транслирует видеокартинку через задний разъем на FPV передатчик. Боковой разъем типа USB, я вообще не использую - закрываю его заглушкой. Зарядка камеры во время полета и получение живой картинки идет через универсальный задний разъем.

Простите, это 0.07 мм провод имеется в виду?
Да, конечно 0.07мм. Провод сначала брал с катушек реле, потом нашел небольшую катушку. Сопротивление одной фазы выходило в среднем чуть более 10 Ом.
Денис, со шлейфами и разъемами я понял, но чтобы до них добраться нужно снять черную крышку, которая находиться под движком. Вот как ее снять? Остальное я вижу как разбирается.
Под рукой Зенмуса нет, показать не могу, но разбирается весь подвес буквально за пару минут. Там нужно освободить валы двигателей путем откручивания винтов в валах, затем открутить небольшие винты стягивающие черные металлические детали и платы драйверов двигателей. Конструкция там простая, а винтов немного.
По всей видимости в задней части, но чтобы до них добраться, нужно снять чёрную крышку, которую не удаётся снять.
Здесь на фото, желтой стрелкой указано положение шлейфа, замок находится сзади разъема. Вообще, существуют разъемы с замком спереди и без замка. Это сразу видно по разъему - отсутствие подвижных частей указывает на то, что шлейф вставляется просто нажатием. 
Денис, а вот эти шлейфы
fotki.yandex.ru/users/steindenis/view/923947/
как из гнезда вытаскиваются? Просто вытягиваются?
Сергей, по фотографиям плат выше, видны белые разъемы, куда и вставляются все шлейфы, на этих разъемах видны черные узкие пластины - это фиксаторы шлейфов, замки. Чтобы вытащить шлейф нужно черный пластмассовый замок поднять вверх. Этим действием мы ослабим прижим ножевых контактов внутри разъема и шлейф вытаскивается свободно. Можно вставить и вытащить шлейф и с закрытым замком, но есть риск повредить шлейф.
Здравствуйте, Денис!
После падения коптера приступаю к ремонту подвеса DJI Zenmuse H3-2D. Я просмотрел записи форума и хотел бы уточнить некоторые детали.
- После осмотра подвеса увидел, что один датчик Холла отсутствует. Чтобы его припаять мне нужно разобрать мотор с помощью высверливания отверстия и выбивания стопорного вала, но пока не понимаю как это сделать. Подскажите, пожалуйста, подробнее порядок действий.
- Где можно приобрести датчики Холла A1326?
- Где можно приобрести CAN-шину для подвеса, т.к. она также была повреждена при падении коптера?
С уважением, Сергей, г. Воронеж.
Здравствуйте Сергей.
Чтобы разобрать мотор подвеса, я высверливал отверстие с обратной стороны мотора - со стороны вала двигателя и маркировки. Высверливал сверлом чуть большим диаметром, чем сам стопорный вал в статоре. Сверлил дремелем. После того как отверстие просверлено, я брал сломанное сверло диаметром примерно равным стопорному валу ( не больше) и выбивал этим сверлом стопор с помощью молоточка. Сверло перед этим в острой сломанной части стачивал надфилем под плоскость. После того, как вал выбит ,обматывал статор несколькими слоями бумаги и с помощью больших пассатижей ( у которых имеется углубление в виде окружности) захватывал статор и вращая тянул на себя. Для того ,чтобы легче снималось, капал несколько капель flux-off ( или ацетон) в зазор статора и основания мотора, избегая попадания жидкости в подшипники.
Датчики Холла можно купить на Элитане. www.elitan.ru Вверху в поиске забиваете деталь - A1326. В результатах поиска ищете датчик Холла в корпусе SOT23 - к примеру A1326LLHLT-T@ALLEGRO
Если нужна микросхема CAN шины - там можно найти например эту позицию SN65HVD232D@TI
Если требуется замена гибкого шлейфа, то запчастей на продукцию DJI вообще нет нигде, тут уже восстанавливать самим, или искать донора.
упс. Я почему-то думал что то ключ(( спасибо что подсказали. Они есть в продаже?
Там стоит аналоговый датчик Холла A1326. Стоит копейки. Можно поставить любой аналогичный по даташиту - www.allegromicro.com/…/A1324-5-6-Datasheet.ashx
Здравствуйте Денис!
Может Вы подскажете в чем проблема с подвесом Zenmuse H3-3D. После падения ведет себя не адекватно, дергает горизонт в разные стороны и очень нагреваются движки! Я его полностью разобрал (видимых повреждений нет и собрал обратно). После этого не дергает, но имеет к этому порыв) сбились настройки горизонта (асист не хватает для нормализации настроек) и происходит завал камеры, так же греется!!! Вообщем опять дергается и движки греются очень сильно, буквально через минуту после включения. У меня Фантом 2. Как отремонтировать самому? Для Вас я понимаю это решаемый вопрос. Подскажите пожалуйста…
Ответил в личку.
Денис, как думаешь может просто плату Alexmos переделать на полевики? перемотать для меня уж оч гимор)
Тут нужно экспериментировать. Насколько помню алексмос есть в версии под большие токи. Собственно, я имел дело только в версии на базе драйверов L6234 и для меня разобрать-перемотать двигатель особой сложности не представляет.
Уважение и почет!
Если не секрет, как планируете строить станок с ЧПУ, есть ссылки на описание?
Пока серьезно не задумывался над конструкцией, так как времени пока нет, да и куплены далеко не все комплектующие. Пока только в наличии валы ШВП 2005, моторы-шаговики, контроллер smoothstepper, драйверы. В будущем вижу проблему с металлом и его обработкой. У нас в Калининграде с этим большая проблема - Д16 вообще не нашел, есть небольшой выбор АМГ и АМЦ, а вот на чем его обрабатывать ( серьезный ЧПУ) пока не представляю. Возможно придется брать мягкий металл и вручную его сверлить и пилить. Как например я делал здесь - stein-den.livejournal.com/5484.html
А каким лобзиком? я удивляюсь и восхищаюсь тонкостью работы…
Благодарю! Лобзик обычный за 80 руб. с местного магазина стройматериалов.

Для более мелких деталей вариант подороже.

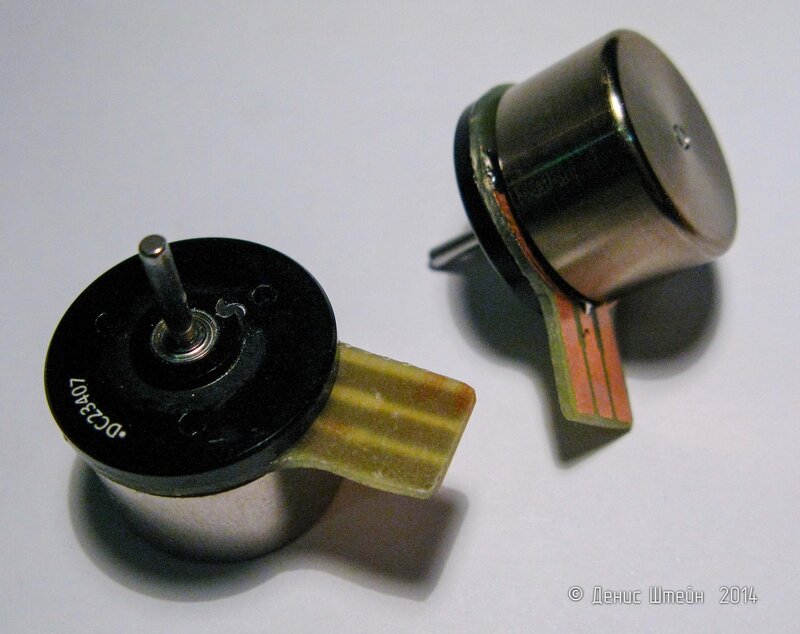
Вот перемотанные моторы. Так как подвес двух осевой - мотора 2. На третью ось я поставил тоже перемотанный мотор Rctimer типа Bc2836, только короче раза в 2. Разбираются моторы Зенмусов с помощью высверливания отверстия и выбивания стопорного вала - отверстие видно на фото.

ну у меня h3-3d так что 3 ось есть, датчики Холла по идее если не подключать то можно и не выкидывать, а двигатели зачем перематывать? и на какие параметры их перемотать?
У Зенмусов стоят полевые транзисторы в качестве ключей и обмотки двигателей низкоомные. Для алексмоса нужно хотя бы 8 Ом на фазу. Я перематывал двигатели от H3-2D проводом 0,07 Ом, получалось около 60 Витков на зуб. В среднем вышло по 12 Ом на фазу - межфазное не менее 20 Ом. В этом случае и двигатели еле теплые и драйвер холодный.
эх … у меня нет коробочки и фантома нет) тока битый подвес… вот и ищу инфу скока там вольт. хочу подать напряжение проверить будет ли он работать без фантика сам по себе или без назы
Можно начиная с 5В проверять. А самое правильное решение - выкинуть всю DJI электронику с подвеса, включая датчики Холла. Двигатели перемотать, добавить мотор третьей оси, плату поставить алексмос. Вот тогда подвес будет работать отлично с возможностью настроек.
Денис, а можешь подсказать каким напряжением питается подвес?? интересует имеено то которое идет с Фантома или с GCU… 8 пиновый кабель которым соединяется подвес и фантик. в нем распиновка
1 can l
2 can h
3 +
4 +
5 -
6 -
7 video
8 video
Уже давно разбирал подвес, значения напряжений, осциллограммы где-то на листочке. На память, в районе 7 Вольт, но нужно замерять, ибо не уверен точно в этом значении. Можно разобрать коробку GCU и измерить прямо на керамических конденсаторах ближе к выходу.
Я использовал два таймера на ne555 для навигации.тоже нормально работает.время немножко разное только на пользу.
Я планировал изначально использовать 555 таймер, но в итоге решил, что проще использовать один МК в подобном корпусе - attiny13, с внутренним тактированием, т.е. практически без обвязки из пассивных элементов, но самое главное - применение 555 таймера не позволило бы организовать стабильный ток через кристаллы светодиодов с высокой эффективностью. За стабильный ток отвечают микросхемы PT4115, что в свою очередь повысило отказоустойчивость. А так, источником сигнала для PT4115 может и выступать 555 таймер, тут разница только в количестве элементов.
Мда… Такого перфекционизма еще не встречал. Внушает… Сильно!
Летает хорошо?
Сергей, спасибо! Небольшое видео можно глянуть вот тут rcopen.com/blogs/125836/18865
В целом, для видеосъемки летает очень хорошо, но посещают мысли об изготовлении версии 2.0 на базе Вуконга. Но это еще более серьезные затраты, к которым пока не готов. Надеюсь погода и время позволят доснять более продолжительный ролик на этот, уже имеющийся аппарат.
Очень круто! Нет слов! Аккуратно и просто красиво!
Игорь, благодарю!
Здравствуйте Борис. Учитывая, что мотору досталось, однозначно нужно проверить все датчики Холла. Они c аналоговым выходом, в связи с этим сложностей с проверкой нет. В первой части я приводил маркировку элементов, можно скачать даташит, для того чтобы определить назначение выводов. Сами датчики можно не выпаивать, просто отсоединить узел двигателя от платы, снять ротор и подать 5Вольт на датчики Холла ( на Зенмусах питание на 3 датчика подается одновременно) Далее проверять реакцию каждого датчика на магнитное поле- постоянный магнит. С помощью осциллографа, мультиметра. Вообще, нужно смотреть осциллографом что там с CAN шиной. Платы у Зенмусов многослойные, встречал мех. повреждения плат с повреждением дорожек внутри, обычно видна деформация печатной платы. В таком случае, нужно еще смотреть SMD пятачки на предмет отлетевших деталей - это видно сразу.
Новых запчастей-узлов, плат на Зенмусы нет и судя по всему не будет, потому с заменой узлов будут большие сложности. На разборку таких вещей как правило не бывает - либо в очень редких случаях.
Такое неадекватное поведение подвеса с хаотичным вращением может говорить как он наличии неполадок с CAN шиной, так и с неисправностью процессорной платы (мех. повреждения), либо плат контроллеров-драйверов осей тангажа и крена. В любом случае ,как минимум нужен очень внимательный визуальный осмотр на предмет повреждений деталей, шлейфов и проч.
Да, скрутка - традиционный технологический прием 😃 Я свою проводку скрутил, пропаял и в винтовой клеммник зажал. Ибо пожары из-за искрения и нагрева случаются часто.
Летающих табуреток я сделал много. Уже за десяток точно. Фото первых из них прикрепил. Прогресс, по сравнению с Х4-01, как говорится на лицо.


Про сборку подвеса я написал несколько частей, начиная с этой - rcopen.com/blogs/125836/18474
Вкратце - разработал 3Д модель, выпилил лобзиком, покрасил, собрал и настроил. Исполнительный механизм - не сервоприводы, а модные в последнее время бесколлекторные моторы. Плату собирал сам, здесь схема - code.google.com/p/brushless-gimbal/…/detail?name=B… Опять же, платы есть готовые, но дешевле и надежнее собрать самим.
Честно говоря, даже не смотрел в сторону готовых проектов. Как и многие другие вещи, решил сделать самостоятельно. Мыслей об экономии не было, время и трудозатраты - выделял столько, сколько необходимо.
В моем случае, общая высота блока контроллера БК подвеса и полетного контроллера составляет 18 мм. Если же устанавливать платы с штатными гребенками 2,54мм, то минимальная высота этого блока будет уже 30мм. Кроме того, аппарат придется делать шире из-за угловых контактов на полетном контроллере. Именно поэтому, я все разъемы выпаял + это обеспечит большую надежность изделия, так как количество эл. контактов будет минимально.
О Боже! Вы мой новый кумир!😃! Такое собрать!!! Если не секрет, какая себестоимость всего этого вышла?
Павел, спасибо за столь высокую оценку моего детища! По себестоимости материалов, компонентов вышло не более 50 тыс. руб. Точные расчеты не производил - в районе этой суммы. Естественно, дороже всего вышла работа - начиная с моделирования и заканчивая изготовлением узлов, сборкой.
машина классная и дизайн и видно что сделано с душой.
раз уж зашла речь - вспоминая архимеда - дай мне рычаг и я переверну землю. очень уместно.
Алексей, спасибо за развернутый комментарий. Так сложилось, что большую часть времени занял сам процесс проектирования в солидворксе. Я с точностью до грамма взвешивал реальные детали, чтобы как можно точнее рассчитать ЦТ аппарата, это же в полной мере касается и БК подвеса. Расположение демпферов, их количество, а также затяжные элементы - болты М3 с оранжевыми шайбами решают проблему с вибрациями, исключают появление паразитных резонансов, тряской. Я согласен с тем, что демпфированный груз способен совершать свободные колебания, причем амплитуда может возрастать с резонансом - груз, то есть подвес с одной стороны и АКБ с другой, этому лишь помогают. То расположение демпферов, которое я выбрал, а также их затяжка винтами, не позволяет возникнуть подобным колебаниям. Центральная платформа, на которой находится фактически большая часть коптера - полетный контроллер, контроллер БК подвеса, подвес, аккумулятор не болтается в пространстве - разнесенные в стороны демпферы, стянутые должным образом, просто не позволят резонировать, трястись и болтаться такой массе.
Кстати, делая первый вылет на балконе, я совсем не балансировал пропеллеры и не стягивал демпферы - в итоге на камере GoPro наблюдалось небольшое желе, и то только в яркий солнечный день. После балансировки пропеллеров желе исчезло совсем. В конце концов, я установил затяжные винты в демпферы и прижал всю платформу, чтобы гарантированно исключить свободные колебания, которые способны кроме всего прочего вызвать тряску при видеозаписи.
Над водой только старайтесь не летать.
Сергей, наверное удивитесь, но аппарат создавался для полетов над водой. Калининградская область это один большой водоем - Балтийское море, Куршский залив и сама мизерная область изобилующая сотнями речушек, озер. Плоское днище не просто так - туда будет крепиться элемент положительной плавучести - из плотного пенопласта, который позволит приземляться на воду + сюда же моя фанатичная гидроизоляция всей электроники с помощью многочисленных слоев лака. Конечно, в случае аварии, “бутерброд скорее всего приземлится на масло” - но не утонет точно - это главное.
Лепота ! Эстетика и аккуратность на высоте ! Честно признаюсь, называю квадрики “табуретками”, но на этот язык не повернется ! 😒
Александр, благодарю! Конечно радует сей факт, что куча времени потрачена не напрасно, наработан новый опыт.
+1 за коптер. Приятно посмотреть. Но у меня другой вопрос, - на что снимался этот ролик и какая оптика? Цвета больно понравились.
Михаил, спасибо. С земли снимал на 5D MkII, оптика была 85 мм 1.8 и 17-40 4L, диафрагму правда прикрывал выше 10. Одновременно снимать и рулить весьма непросто. На борту была GoPro 3+.