Activity
9 месяцев работ над проектом подошли к завершению. О начале проекта можно прочитать здесь.



В целом, я остался доволен работой аппарата. Требуется лишь подстроить ПИД регулировки полетного контроллера, БК подвеса. Кроме того, добавить некоторые элементы оформления корпуса. Первую табличку из латуни я вытравил в персульфате аммония и хлорном железе. На данный момент, полный взлетный вес аппарата - 1520 грамм. Полетное время около 9 минут на батарее 3700 мА 3S - более чем достаточно для моих задач.

Проект близок к завершению. Здесь, предыдущая Часть 12 - Подвес камеры. После полной сборки аппарата, я решил переделать\добавить некоторые функциональные элементы.
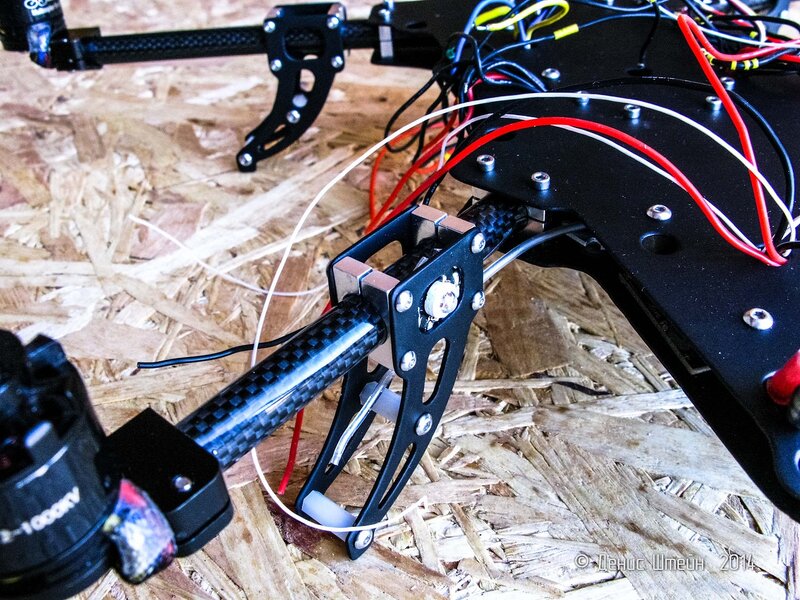
Чтобы предотвратить повреждение корпуса при взлетах\посадках, я добавил посадочные шасси. Тем более, что запас по тяге и полетному времени позволяли увеличить взлетную массу ЛА. На концах посадочных шасси я предусмотрел сменные элементы - самодельные накладки из пластика поликапролактона. При посадке на асфальт, бетон - оголенные элементы посадочных шасси будут приходить в негодность - расплющиваться, стираться, расслаиваться. Накладки из поликапролактона решат эту проблему как минимум на 2 года. После чего, с помощью фена за 15 минут можно установить новые.
Кроме того, я решил создать систему навигационных огней на мощных 3Вт светодиодах работающих в импульсном режиме, вместо светодиодной ленты.
Первым делом, я полностью разобрал аппарат, разместил два мощных 3Вт светодиодов красного и синего цветов свечения на нижней палубе ЛА. Перекрасил все детали рамы матовой черной краской ( первоначально была глянцевая краска).












Разработал плату управления навигационными огнями. Четырехканальный драйвер Quattro FX1 обеспечивает стабильным током 700мА на каждый канал. Драйверы PT4115 управляются от AVR контроллера, находящегося на той же плате. На борту ЛА будет всего 4 светодиода 3Вт и один 0,5Вт, установленный на плате с звуковым излучателем. Я сделал выбор в пользу независимого управления каждым светодиодом, так как это существенно повышает надежность, в отличии от например последовательного соединения светодиодов. Характер работы навигационных огней - импульсный. Это позволит избежать использования массивных радиаторов для кристаллов светодиодов и значительно снизить потребляемый ток.


Введение, первая Часть 1 здесь.
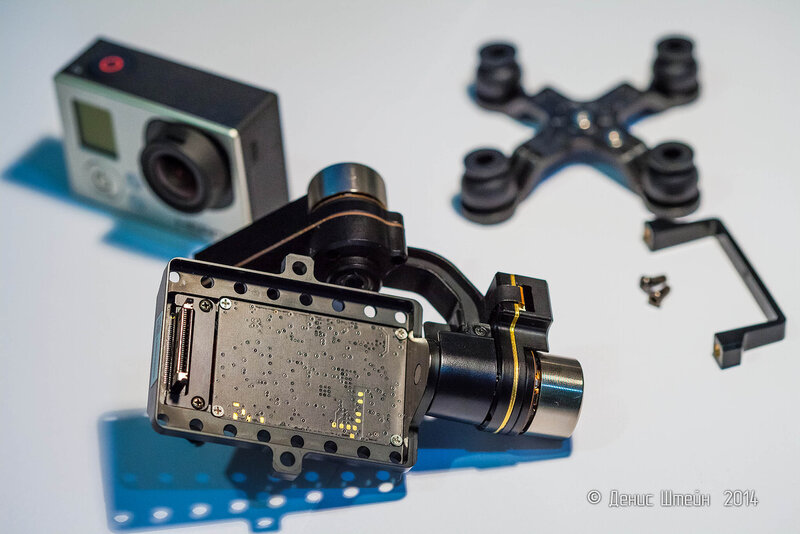
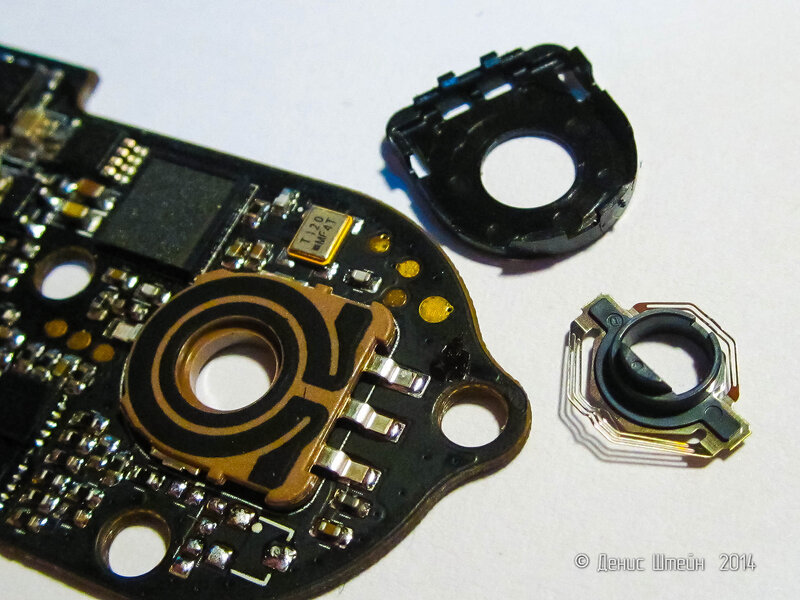
По итогам разборки и ремонтов подвесов H3-2D, я мысленно определил для себя выводы относительно конструкции подвеса в целом. Покупать такой подвес я себе бы не стал - гораздо лучше, самостоятельно изготовить свой, будет надежнее, во много раз дешевле. Слабые стороны подвеса H3-2D - незащищенные датчики Холла на каждом двигателе - от механических повреждений и от попаданий влаги. Сомнительные шлейфы на осях тангажа и крена. Несмотря на то, что на оси тангажа имеется петля с запасом, есть высокая вероятность повреждения шлейфов в будущем. Печатные платы имеют частичную герметизацию для защиты от коррозии, тем не менее, учитывая, что конструкция корпусов далеко негерметичная, возможны проблемы с попаданием влаги, пыли на электронику и переменные резисторы обратной связи. Положительный момент - чтобы почистить переменные резисторы - их необязательно выпаивать. Также, установка GoPro, своим разъемом на площадку подвеса имеет свои плюсы и минусы. С одной стороны изящный внешний вид, без висящих проводов, но с другой - полная незащищенность камеры от внешний воздействий.
Далее, финальная серия снимков.
Ось тангажа.

fotki.yandex.ru/users/steindenis/view/923952/

fotki.yandex.ru/users/steindenis/view/923953/

fotki.yandex.ru/users/steindenis/view/923954/
fotki.yandex.ru/users/steindenis/view/923955/

fotki.yandex.ru/users/steindenis/view/923956/

fotki.yandex.ru/users/steindenis/view/923957/

fotki.yandex.ru/users/steindenis/view/923958/

fotki.yandex.ru/users/steindenis/view/923961/

fotki.yandex.ru/users/steindenis/view/923962/

fotki.yandex.ru/users/steindenis/view/923963/

fotki.yandex.ru/users/steindenis/view/923964/

fotki.yandex.ru/users/steindenis/view/923965/
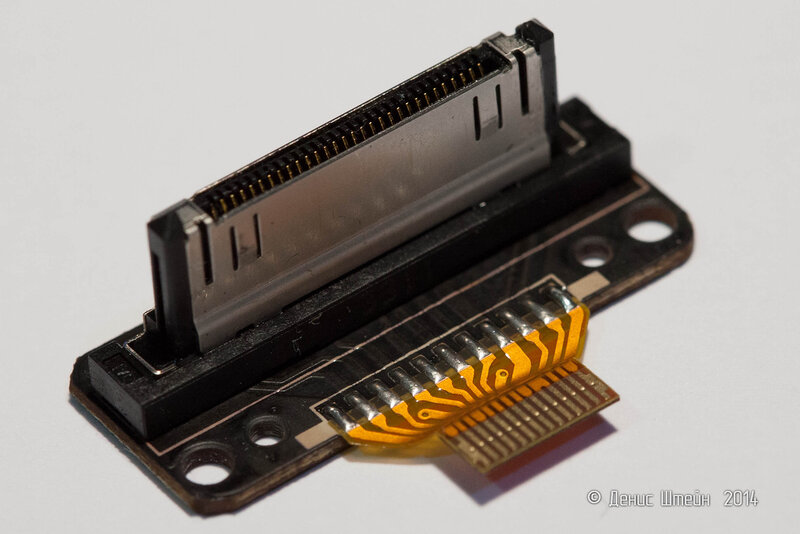
Источник питания с CAN шиной.
fotki.yandex.ru/users/steindenis/view/923966/

fotki.yandex.ru/users/steindenis/view/923967/

fotki.yandex.ru/users/steindenis/view/923935/

fotki.yandex.ru/users/steindenis/view/923936/
Уже имея некоторый опыт ремонта подвесов DJI Zenmuse H3-2D, я решил поделиться технической информацией и фотографиями данного изделия в разобранном состоянии.
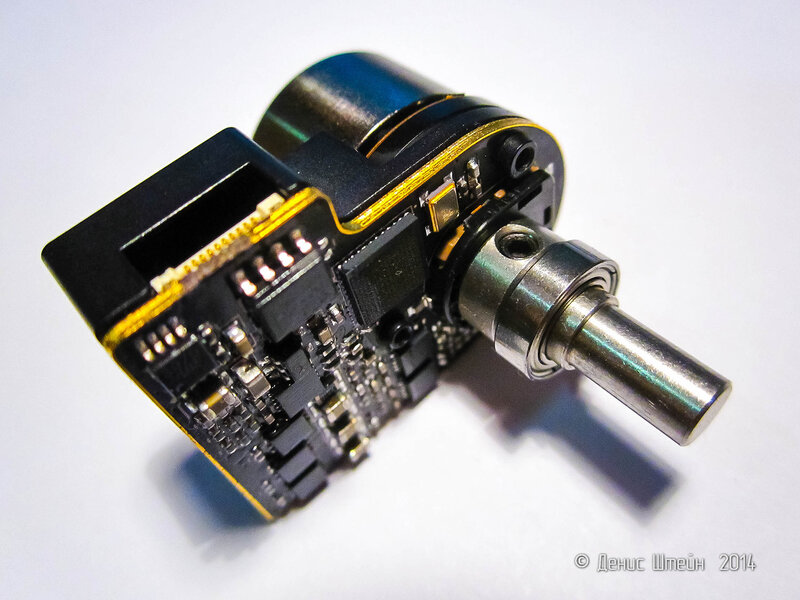
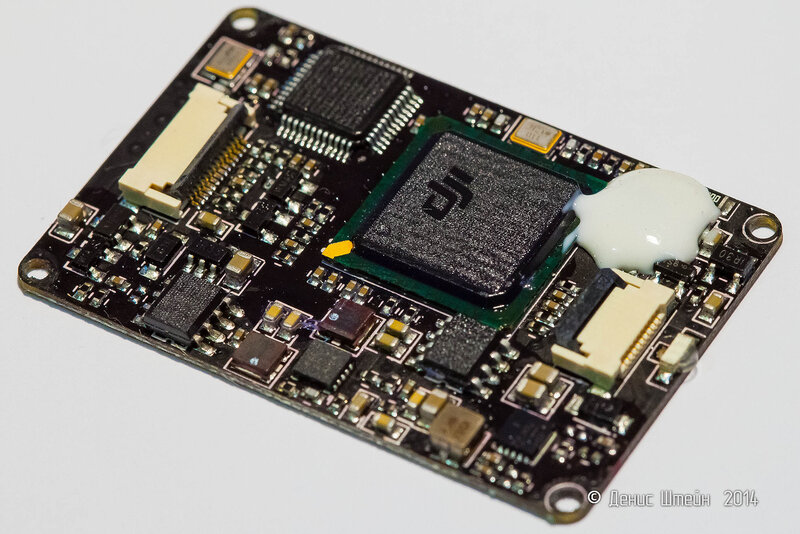
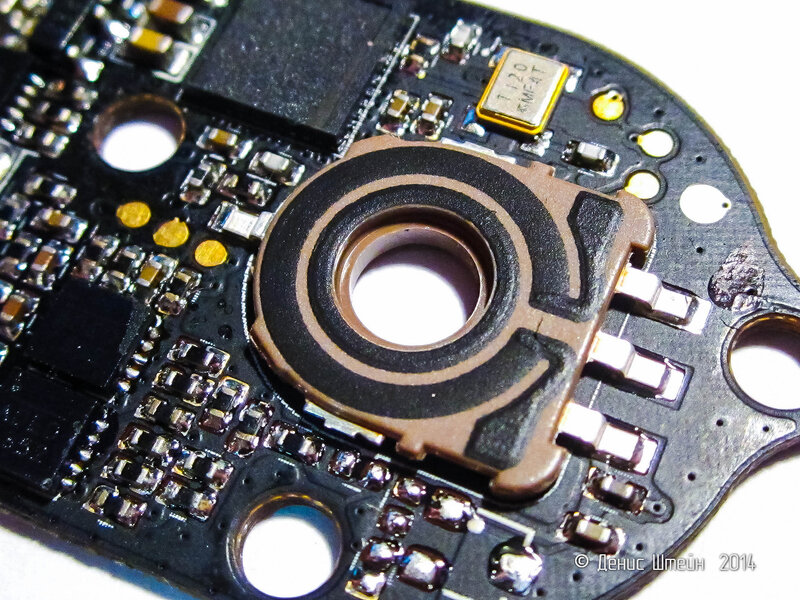
Подвес имеет литые металлические узлы с опорными подшипниками на каждой оси. На оси тангажа и крена находятся отдельные драйвера бесколлекторных двигателей, которые “общаются” с главным процессором по шине CAN. Главная плата находится на площадке камеры. Маркировка основных микросхем скрыта - фрезерована. Каждая ось подвеса имеет систему обратной связи построенную на базе датчиков Холла и переменного резистора.
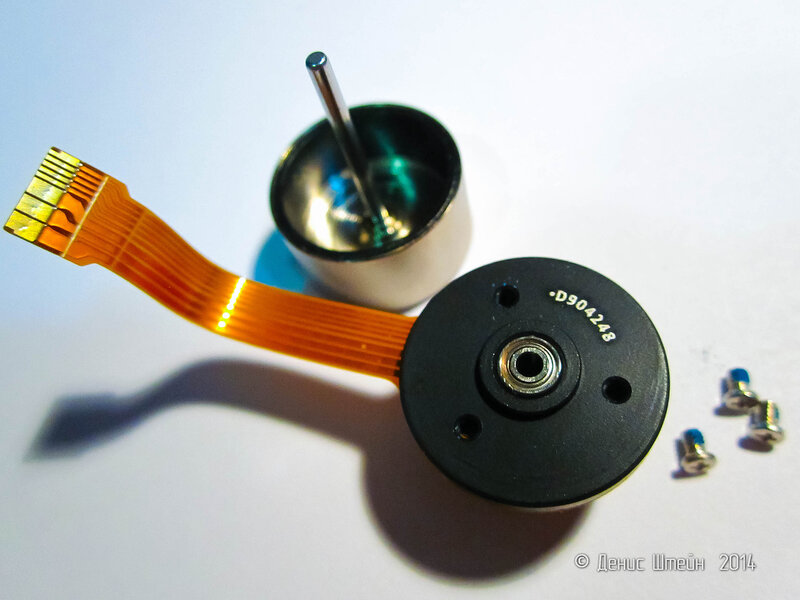
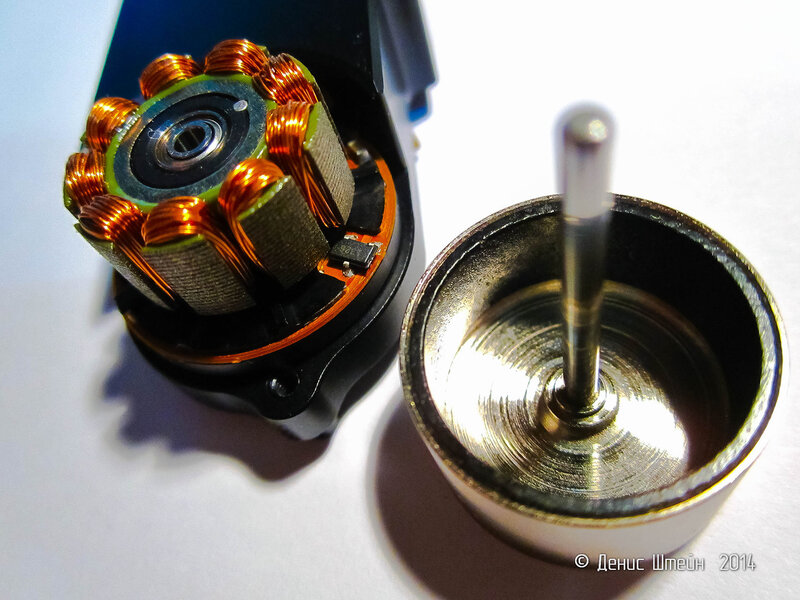
Бесколлекторные двигатели трехфазные, магнит монолитный - имеет 8 полюсов. Статорное железо состоит из 9 зубов. Вал двигателей - 2мм. Внешний диаметр ротора двигателя - 20мм, высота -11мм. Длина вала двигателя - 26,5мм.
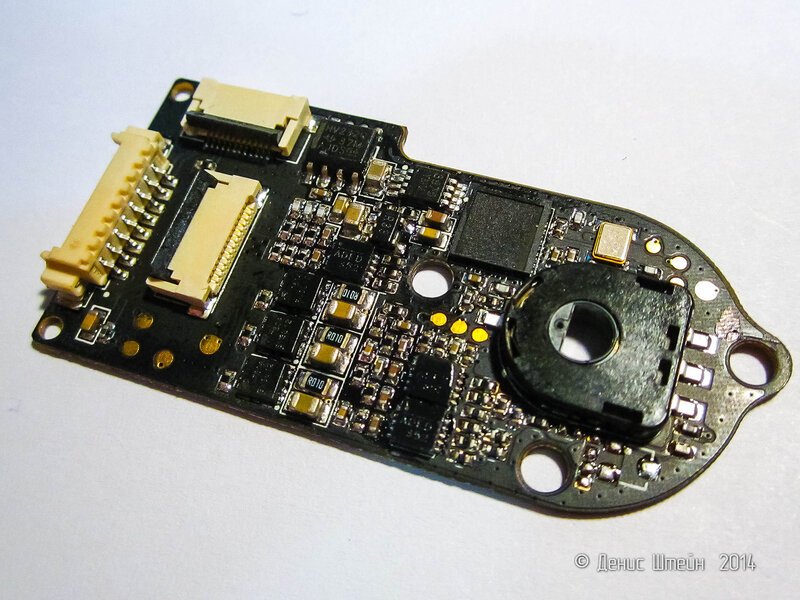
Система управления двигателями - драйверы содержат приемопередатчики CAN шины SN65HVD232Q, микроконтроллеры, драйверы MOSFET, и выходной узел управления двигателями - мощные полевые транзисторы, сборки из 2шт. N канальных MOSFET - AON7804. Эти транзисторы фирмы Alpha & Omega имеют номинальный ток стока 22А при сопротивлении перехода 26мОм. На каждую ось установлено по три транзисторной сборки - итого 6шт. N-канальных полевых транзистора.
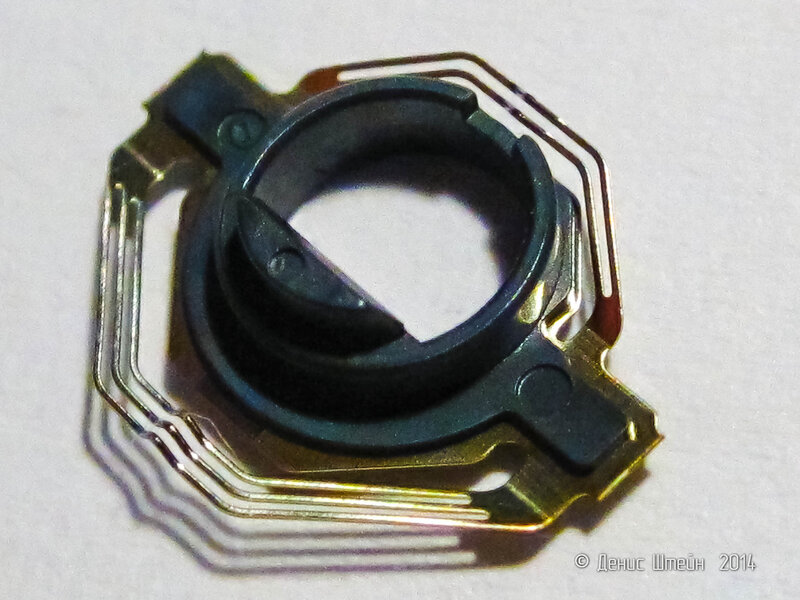
Система обратной связи содержит по три аналоговых датчика Холла A1326 на ось. Кроме того, на платах драйверов установлены SMD переменные резисторы с номинальным сопротивлением 3,5К. Платы драйверов устанавливаются таким образом, чтобы вращение вала бесколлекторного двигателя приводило в движение центральный контакт переменного резистора по графитовому слою.
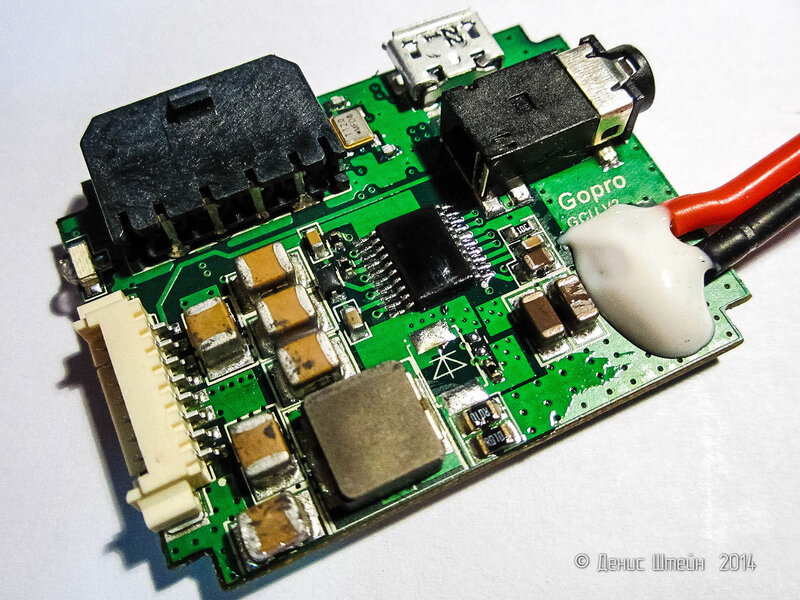
В моем случае, ремонт подвеса, заключался в устранении последствий от короткого замыкания, вызванного попаданием шарика припоя, оставленного на заводе, на выводы микросхемы приемопередатчика CAN шины. Микросхема SN65HVD232QDR имеет цену примерно 100 руб. за штуку.
Другой подвес имел механические повреждения датчика Холла на двигателе оси тангажа из-за неаккуратного пилотирования. В обоих случаях, после подачи питания на подвес, отсутствовала стабилизация подвеса по всем осям.
Ниже, фотографии конструкции подвеса.
Главная плата. С процессором DJI.
fotki.yandex.ru/users/steindenis/view/923937/
fotki.yandex.ru/users/steindenis/view/923938/
Опорный узел оси крена.

fotki.yandex.ru/users/steindenis/view/923939/

fotki.yandex.ru/users/steindenis/view/923940/
Плата драйвера оси крена.
fotki.yandex.ru/users/steindenis/view/923941/
fotki.yandex.ru/users/steindenis/view/923942/
fotki.yandex.ru/users/steindenis/view/923943/
fotki.yandex.ru/users/steindenis/view/923944/

fotki.yandex.ru/users/steindenis/view/923945/

fotki.yandex.ru/users/steindenis/view/923946/
fotki.yandex.ru/users/steindenis/view/923947/

fotki.yandex.ru/users/steindenis/view/923949/
fotki.yandex.ru/users/steindenis/view/923950/

fotki.yandex.ru/users/steindenis/view/923951/
************************
Сборка подвеса близка к завершению. Предыдущая запись - Часть 11
Распаял и собрал плечи оси крена - двигатель привода тангажа и опору. Использовал шелковый эмалированный провод большего сечения, чем для датчика IMU. Все резьбовые соединения промазаны ThreeBond 1401C.
Для вывода AV сигнала с домика гоупро, сделал временное решение - поликапролактон. Вставил голый разъем в домик вместе с проводом, смазал поверхность домика силиконовым маслом. Горячим поликапролактоном создал форму, плотно прилегающую к домику. В будущем буду переделывать. Хочется сделать компактнее и встроить резиновый сальник, который даст необходимую герметичность.

fotki.yandex.ru/users/steindenis/view/919049/

fotki.yandex.ru/users/steindenis/view/919050/

fotki.yandex.ru/users/steindenis/view/919051/

fotki.yandex.ru/users/steindenis/view/919052/

fotki.yandex.ru/users/steindenis/view/919053/

fotki.yandex.ru/users/steindenis/view/919054/

fotki.yandex.ru/users/steindenis/view/919055/

fotki.yandex.ru/users/steindenis/view/919056/

fotki.yandex.ru/users/steindenis/view/919057/

fotki.yandex.ru/users/steindenis/view/919058/
***************************
Продолжение следует…
Продолжаю сборку подвеса. Здесь предыдущая часть.

fotki.yandex.ru/users/steindenis/view/919034/
Датчик IMU приклеен специальной двухсторонней лентой Sony T4000. Толщина клеящего слоя - 0,11мм. Для большей жесткости и надежности, датчик зафиксирован нерж. крепежом М2.

fotki.yandex.ru/users/steindenis/view/919035/
Установил черные нейлоновые стойки.

fotki.yandex.ru/users/steindenis/view/919036/
Распаял провода IMU. Использовал шелковые провода в эмалевой изоляции. Это единственный вариант, оптимально подходящий для подвижных узлов. В отличии от всех остальных проводов, включая отечественный МГТФ и в силиконовой изоляции - шелковый провод имеет рекордно низкую толщину, сверхвысокую гибкость.

fotki.yandex.ru/users/steindenis/view/919037/
Жилы проводов собрал с помощью 1мм прозрачной термоусадочной трубки. Для обеспечения гибкости жгута проводников, я использовал кусочки трубки, примерно по 1,5 мм длиной.

fotki.yandex.ru/users/steindenis/view/919038/
Для защиты от механического повреждения, а также защиты от попадания влаги на контакты платы IMU, я покрыл открытый участок платы и проводники средством Three Bond 1401С.

fotki.yandex.ru/users/steindenis/view/919039/
Препарировал домик Гоупро 3+, в соответствии со своими чертежами. Прежде чем сверлить отверстия, я временно собрал ось тангажа и прикрепляя домик на липой ленте, точно отметил линию центра тяжести. По этой линии и просверлил отверстия в домике.

fotki.yandex.ru/users/steindenis/view/919041/
Кроме того, выпилил место под разъем AV.

fotki.yandex.ru/users/steindenis/view/919042/
Установил домик на место.

fotki.yandex.ru/users/steindenis/view/919040/
Место крепежа М3 болтов, я проклеил с помощью того же эластичного Three Bond 1401С. Это обеспечит герметичность снизу.

fotki.yandex.ru/users/steindenis/view/919043/
Датчик IMU спрятан за основанием подвеса. Такая конструкция надежно защищает хрупкий пъезокристалл от разрушения при механическом воздействии.

fotki.yandex.ru/users/steindenis/view/919044/
Установил роторы двигателей.

fotki.yandex.ru/users/steindenis/view/919045/
Прорези позволяют точно выставить баланс камеры.

fotki.yandex.ru/users/steindenis/view/919046/

fotki.yandex.ru/users/steindenis/view/919047/

fotki.yandex.ru/users/steindenis/view/919048/
***************************
Так как цены на готовые двигатели под средние и тяжелые камеры находятся на сравнительно высоком уровне, я провел испытания связанные с использованием двигателей от лазерных принтеров и копиров. Учитывая, что неисправные двигатели сервисные центры просто выбрасывают, то есть существенная экономическая выгода от использования таких моторов - в большинстве случаев их можно заполучить бесплатно. Под оси тангажа, крена и рысканья, можно подобрать соответствующие размеры моторов от разных моделей оргтехники. Большинство двигателей имеют вал 6мм и два подшипника. К достоинствам таких моторов можно также отнести полное отсутствие залипаний между статором и ротором.
В тестовом видео, я использовал в качестве нагрузки камеру Canon EOS 5D MarkII и объектив EF 17-40 F4L USM. Для тестового управления двигателем я исключил датчик IMU - контроль осуществляется с помощью переменного резистора. Балансировка камеры выставлена примерно.
Используемые двигатели от лазерных принтеров и копиров я разбирал, удаляя лишние части. Из основания оставлял только литое крепление статорного железа. Как правило, моторы разбираются несложно, в большинстве моделей ротор зафиксирован стопорным кольцом.
Перематывал проводом 0,2 - 0,26 мм. Помещается примерно по 250 витков на зуб. Способ монтажа, я выбирал исходя из конструкции двигателя. Основная идея - сквозное крепление болтами М3 через балку к основанию статорного железа. На роторе прикручивается\приклепывается накладка из стеклотекстолита. Такое крепление обеспечивает высокую жесткость и облегчает процесс выставления ЦТ по каждой оси.

fotki.yandex.ru/users/steindenis/view/916474/

fotki.yandex.ru/users/steindenis/view/916473/

fotki.yandex.ru/users/steindenis/view/916467/

fotki.yandex.ru/users/steindenis/view/916469/

fotki.yandex.ru/users/steindenis/view/916470/

fotki.yandex.ru/users/steindenis/view/916471/

fotki.yandex.ru/users/steindenis/view/916475/

fotki.yandex.ru/users/steindenis/view/916472/

fotki.yandex.ru/users/steindenis/view/916476/

fotki.yandex.ru/users/steindenis/view/916477/

fotki.yandex.ru/users/steindenis/view/916478/

fotki.yandex.ru/users/steindenis/view/916464/

fotki.yandex.ru/users/steindenis/view/916465/

fotki.yandex.ru/users/steindenis/view/916466/
Продолжаю строить подвес. Здесь предыдущая Часть 9
Собрал покрашенные детали, пока без крепежа.

fotki.yandex.ru/users/steindenis/view/911415/

fotki.yandex.ru/users/steindenis/view/911416/

fotki.yandex.ru/users/steindenis/view/911417/

fotki.yandex.ru/users/steindenis/view/911418/
В качестве крепежа буду использовать винты и гайки М2 из нержавеющей стали.

fotki.yandex.ru/users/steindenis/view/911422/

fotki.yandex.ru/users/steindenis/view/911419/

fotki.yandex.ru/users/steindenis/view/911420/

fotki.yandex.ru/users/steindenis/view/911421/

fotki.yandex.ru/users/steindenis/view/911423/

fotki.yandex.ru/users/steindenis/view/911424/

fotki.yandex.ru/users/steindenis/view/911425/

fotki.yandex.ru/users/steindenis/view/911426/

fotki.yandex.ru/users/steindenis/view/911427/

fotki.yandex.ru/users/steindenis/view/911428/

fotki.yandex.ru/users/steindenis/view/911429/
Установил датчик БК подвеса. Плату датчика покрыл лаком.

fotki.yandex.ru/users/steindenis/view/911430/
**********************************
Покрасил детали БК подвеса.
fotki.yandex.ru/users/steindenis/view/910024/
Приготовил двигатели.

fotki.yandex.ru/users/steindenis/view/910025/

fotki.yandex.ru/users/steindenis/view/910026/

fotki.yandex.ru/users/steindenis/view/910027/

fotki.yandex.ru/users/steindenis/view/910029/

fotki.yandex.ru/users/steindenis/view/910030/

fotki.yandex.ru/users/steindenis/view/910031/

fotki.yandex.ru/users/steindenis/view/910032/

fotki.yandex.ru/users/steindenis/view/910033/

fotki.yandex.ru/users/steindenis/view/910034/

fotki.yandex.ru/users/steindenis/view/910035/

fotki.yandex.ru/users/steindenis/view/910036/

fotki.yandex.ru/users/steindenis/view/910037/

fotki.yandex.ru/users/steindenis/view/910038/
Балка - плечо оси крена.

fotki.yandex.ru/users/steindenis/view/910028/
**********************************
Предыдущая Часть 7 - финальная сборка носителя подвеса
Параллельно, в приготовлениях к летным испытаниям X4-01, я занялся подвесом.
Основными требованиями к подвесу были следующие:
- Надежная, жесткая и прочная конструкция
- Обязательная установка защитного домика для GoPro 3\3+ Black
- Наличие двух точек опоры для оси тангажа
- Минимальные габариты
- Приличный внешний вид
- Возможность изготовления всех деталей и узлов только руками, без использования станков и других сложных приспособлений.
К этому моменту, я уже имел приличный опыт постройки “колхозных” БК подвесов по консольной схеме для таких легких камер как GoPro. Вдоволь наигравшись с такими подвесами, я решил перейти на другой уровень - усложнить, добавить точку опоры, которая только улучшит качество видеозаписи, и что немаловажно, существенно повысит надежность подвеса. Я долгое время не решался использовать герметичный домик GoPro для коптерной съемки. Из минусов - значительно вырастут габариты, масса, сильно усложнится крепление такого домика к подвесу, для использования AV-выхода сквозь домик и обеспечения относительной герметичности камеры, придется принимать соответствующие меры.
Но, использование крепкого домика GoPro на коптере, имеет существенные положительные стороны - защита от царапин на линзе, защита от механических повреждений корпуса, при полетах над водой, есть шанс извлечь камеру сухой до того, как в бокс просочится вода, бокс также защитит от брызг, дождя. Естественно, в защитном корпусе шансы выживаемости камеры гораздо выше, нежели у открытой GoPro. Еще одна из причин, почему я предпочел использовать защитный бокс - приличная стоимость GoPro Black - например поцарапав линзу, будет непросто отдать как минимум половину стоимости камеры за новую оптику.
В итоге, я создал такой трехмерный прототип. В качестве привода оси тангажа, я использовал переделанные моторы 2204-14. Для оси крена - BC2836, BC2208, которые из-за своих нелепых цанг, только и годятся для БК подвесов. Везде используется тип креплений шип-паз, под нержавеющий крепеж М2, “потай” - с конусной головкой.

fotki.yandex.ru/users/steindenis/view/908646/

fotki.yandex.ru/users/steindenis/view/908644/
Учитывая опыт эксплуатации предыдущих подвесов, я создал прототип таким образом, чтобы избежать многих ошибок, полученных ранее. Например, датчик гироскопа\акселерометра надежно защищен от удара. В прошлом, я уже имел случаи выхода из строя датчиков от внешнего воздействия. Из-за своей пьезоструктуры, MEMS датчики очень чувствительны к ударам. Механическое воздействие способно разрушить хрупкий микроэлемент внутри микросхемы. В моем случае, датчик MPU6050 крепится под боксом камеры. Далее, в самом низу, установлена внешняя защитная пластина, которая и выполняет функцию защиты датчика. Одновременно, эта пластина повышает жесткость конструкции подвеса.

fotki.yandex.ru/users/steindenis/view/908643/

fotki.yandex.ru/users/steindenis/view/908645/
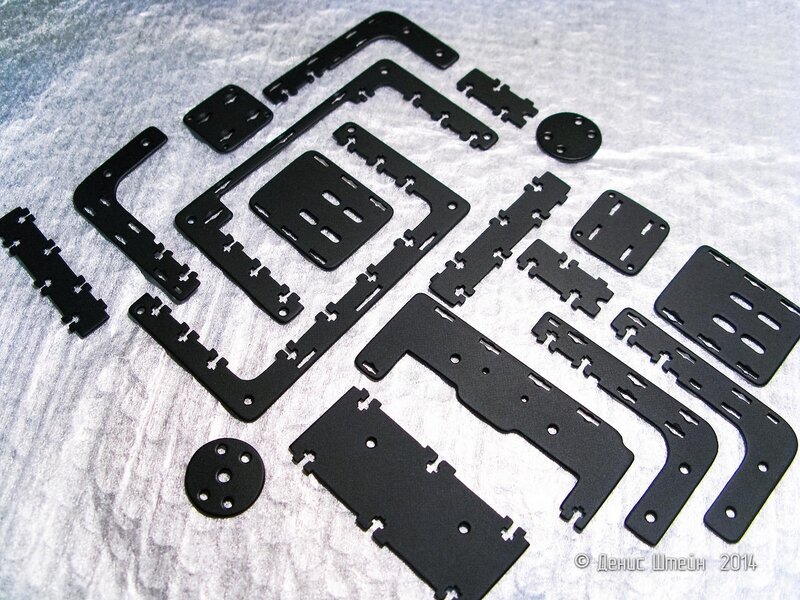
При проектировании, для придания необходимой прочности и надежности подвесу, я решил использовать 1,5 мм листовой материал. Опять же, из практических соображений был выбран фольгированный стеклотекстолит FR4. Фольгу я стравил. C помощью ламинатора, перевел чертеж деталей на поверхность листа FR4.

fotki.yandex.ru/users/steindenis/view/908648/

fotki.yandex.ru/users/steindenis/view/908649/

fotki.yandex.ru/users/steindenis/view/908650/

fotki.yandex.ru/users/steindenis/view/908651/
Детали выпиливал лобзиком.

fotki.yandex.ru/users/steindenis/view/908656/

fotki.yandex.ru/users/steindenis/view/908652/
После того, как выпилил все детали, я произвел пробную сборку деталей подвеса. Весь процесс, начиная с выпиливания деталей, до точной подгонки фрагментов, так чтобы они вставлялись с трудом друг в дружку, заняло почти неделю. Пробная сборка была необходима для точной подгонки, зенковки углублений под винты, шлифовка наждачной бумагой, так, чтобы поверхность была гладкая - без торчащих фрагментов деталей.

fotki.yandex.ru/users/steindenis/view/908653/

fotki.yandex.ru/users/steindenis/view/908657/

fotki.yandex.ru/users/steindenis/view/908654/
После точной подгонки деталей, я разобрал подвес, зачистил поверхность и приготовил к покраске.

fotki.yandex.ru/users/steindenis/view/908658/

fotki.yandex.ru/users/steindenis/view/908659/

fotki.yandex.ru/users/steindenis/view/908655/
**************************
Вышел на финишную прямую.

fotki.yandex.ru/users/steindenis/view/907928/

fotki.yandex.ru/users/steindenis/view/907929/

fotki.yandex.ru/users/steindenis/view/907930/

fotki.yandex.ru/users/steindenis/view/907932/
Вот так, антенна складывается в походное положение.

fotki.yandex.ru/users/steindenis/view/907933/

fotki.yandex.ru/users/steindenis/view/907934/

fotki.yandex.ru/users/steindenis/view/907935/

fotki.yandex.ru/users/steindenis/view/907936/

fotki.yandex.ru/users/steindenis/view/907937/

fotki.yandex.ru/users/steindenis/view/907938/
Теперь, когда общий вид квадрика понятен, я покажу, как делал страховочные болты для верхней палубы.
Материал шайб - стеклотекстолит FR4, толщиной 1мм. Заготовки делал стандартным способом - печать из САПР, на термотрансферную бумагу Ломонд, потом перевод рисунка на стеклотекстолит с помощью ламинатора.

fotki.yandex.ru/users/steindenis/view/908085/
Выпиливал, как и все детали - лобзиком.

fotki.yandex.ru/users/steindenis/view/908086/
Затем, чтобы подогнать шайбы как можно более точно к рисунку, обрабатывал на точильном станке. Красил акриловой краской в баллончике.

fotki.yandex.ru/users/steindenis/view/908087/
Крепеж собирал на базе нержавеющих винтов имбус М3, сердцевину болта формировал из двух слоев прозрачной термоусадки, так, чтобы она соответствовала внутреннему диаметру силиконового демпфера - 6мм. Впоследствии, на этот крепеж навинчивались на нужную длину гайки М3 с нейлоновыми вставками.

fotki.yandex.ru/users/steindenis/view/908088/
***********************
Продолжение следует…
Здесь предыдущая - Часть 5
На подходе верхняя палуба - основной узел, содержащий полетный контроллер, силовую АКБ, дополнительную электронику, крепление БК подвеса.
Начну с полетного контроллера - готовить буду кроличьи мозги.
За время долгих полетов, себя неплохо зарекомендовал Rabbit 1, но в последнее время, его стало сложно купить. Уже давно существует версия 2 кролика. Кролик 2, позиционируется как замена первой модели, для него существует недорогая плата OSD, общий функционал был расширен. Но вместе с тем, кролик 2 имеет один недостаток - не знаю какую траву курили разработчики этого девайса, но они сделали опрометчивый шаг - изготовили внешнюю платку IMU, на которой разместили вообще все датчики, включая магнитометр. Предыдущая версия имела отдельную гироскоп и акселерометр на плате процессора, а магнитометр и барометр - на внешней плате. Естественно, для первой версии у меня была уже опробованная схема -я выносил плату магнитометра рядом с GPS приемником, и забывал насовсем о наводках от проводов, крепежа и других элементов коптера. Поднимать высоко плату IMU кролика 2 нельзя - гироакселерометр будет находится много выше ЦТ аппарата.
Для X4-01 я хотел купить именно первую версию кролика - купил, но продавец написал, что их уже нет и он может за эти же деньги выслать вторую версию.
Я скрипя душой согласился, прикинув, что в случае, если у меня будут сильные наводки постоянного и переменного полей, я просто выпаяю магнитометр, сделаю микроплату, прицеплю ее на шину i2c, и подниму на самую верхнюю плоскость.
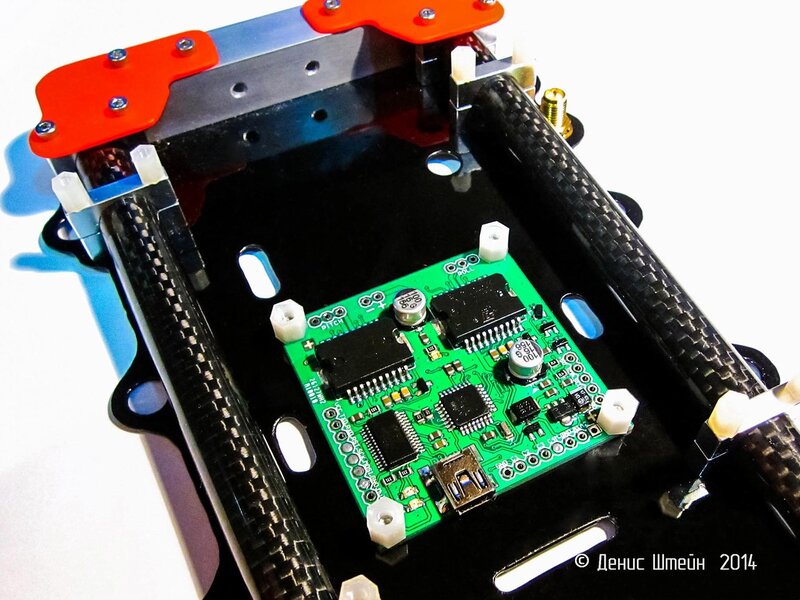
Получив кроличьи мозги, сопоставив их с чертежом, я понял, что их придется прилично переделать. Из-за небольшого пространства внутри квадрика, штатные мозги там не поместятся - придется выпаивать трехрядные гребенки, все провода к контроллеру буду припаивать - оно даже и лучше, возрастет надежность.

fotki.yandex.ru/users/steindenis/view/907768/
fotki.yandex.ru/users/steindenis/view/907769/

fotki.yandex.ru/users/steindenis/view/907770/
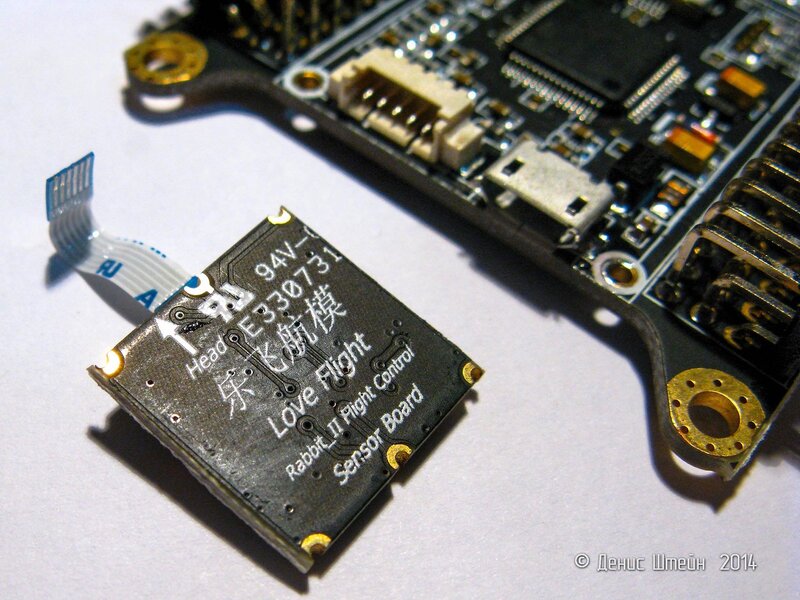
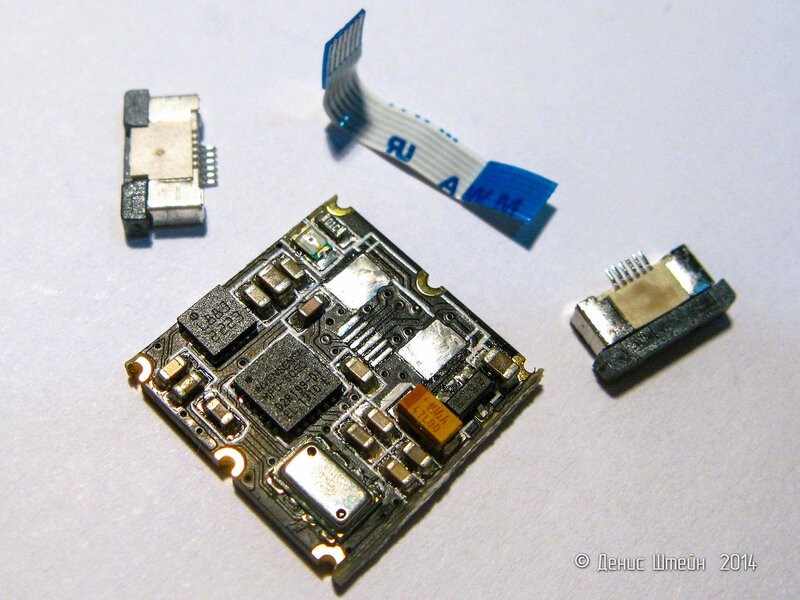
Нелепый шлейф, идущий от процессора к IMU ( напоминающий один из тех, что используются в самых дешевых мыльницах), я решил убрать. Шлейф, да и еще такого качества, соединяющий IMU с процессором - большое зло, малейшее нарушение контакта приведет к аварии.
fotki.yandex.ru/users/steindenis/view/907771/

fotki.yandex.ru/users/steindenis/view/907772/
Китайцам удалось несколько реабилитироваться в моих глазах. Оказывается, по периметру платы они вывели все необходимые сигналы. На процессорной (материнской) плате имеются соответствующие отверстия. Убрав шлейф, все что потребуется сделать - впаять вертикально провода, соединив материнскую и плату IMU.

fotki.yandex.ru/users/steindenis/view/907773/
Для того, чтобы уместить кроличьи мозги внутри X4-01, я выпаял трехрядную гребенку.

fotki.yandex.ru/users/steindenis/view/907774/

fotki.yandex.ru/users/steindenis/view/907775/
Традиционно, надежно защищаю плату от воздействия влаги. Перед нанесением лака, я пропаял STM процессор с помощью флюса FluxPlus.

fotki.yandex.ru/users/steindenis/view/907776/
Кроличьи мозги приготовлены для употребления. Плату IMU, я пока не стал покрывать лаком - оставил на потом. Впоследствии, после того как будут проведены испытания, станет ясно, стоит ли выпаивать чип магнитометра. Соответственно, лаком покрыть можно в самый последний момент.

fotki.yandex.ru/users/steindenis/view/907777/
Модуль OSD покрыл лаком. Его буду ставить в последнюю очередь, когда X4-01 пройдет полетные испытания.

fotki.yandex.ru/users/steindenis/view/907789/
Начал собирать верхнюю палубу. Установил хомуты-зажимы. Все болты сажаю сразу на локтайт.

fotki.yandex.ru/users/steindenis/view/907790/
Тут я сделал большой рывок вперед. Установил трубы, плату контроллера подвеса. Выпилил алюминиевую балку крепления подвеса, рассверлил ее, закрепил уголками-пластинами.
fotki.yandex.ru/users/steindenis/view/907791/
Снял балку назад, понял, что было бы неплохо, хотя бы чуть-чуть отполировать. Сама балка будет крепиться тремя болтами М2.5 снизу к пластине, и сверху уголками из 1,5мм стеклотекстолита по 2 болта на сторону. Уголки-пластины, в свою очередь крепятся на хомуты, также по 2 болта М2.5.

fotki.yandex.ru/users/steindenis/view/907788/
Продолжил сборку. Теперь выглядит вот так, для масштаба с гоупро 3.

fotki.yandex.ru/users/steindenis/view/907925/
Установлено все, кроме передатчика 5,8 ГГц и модуля OSD. Их буду ставить по завершении сборки всего коптера.

fotki.yandex.ru/users/steindenis/view/907926/
*****************************
Следующая Часть 7
Учитывая, что в руки попала эта игрушка - решили записать небольшой обзор. Чуть позже, сделаю технический обзор связанный с ремонтом подвеса H3-2D - там шарик припоя, оставленный заводом натворил бед.
Продолжаю монтаж бортовой электроники между двумя пластинами рамы. Предыдущая Часть 4 здесь.
Покрыл лаком плату приемника FrSky -кроме ВЧ разъемов и тактовой кнопки.

fotki.yandex.ru/users/steindenis/view/907485/

fotki.yandex.ru/users/steindenis/view/907483/
Тоже самое проделал с монитором LiPo - пищалкой, только предварительно выпаял кнопку, иначе есть риск испортить ее лаком. В этом модуле, я выпаял стандартную гребенку, и установил силиконовые провода, провода будут припаяны к балансировочному разъему, закрепленному на раме.

fotki.yandex.ru/users/steindenis/view/907484/
Для подключения приемника к Rabbit II, контроллеру БК подвеса, я приготовил тонкие силиконовые провода 26 AWG. На концах проводов обжаты и пропаяны стандартные разъемы. Разъемы будут вставляться в приемник, а со стороны контроллера подвеса и Rabbit II они будут припаиваться.

fotki.yandex.ru/users/steindenis/view/907486/

fotki.yandex.ru/users/steindenis/view/907488/

fotki.yandex.ru/users/steindenis/view/907487/

fotki.yandex.ru/users/steindenis/view/907489/

fotki.yandex.ru/users/steindenis/view/907490/
Установил верхнюю пластину. Для того, чтобы не запутаться в проводах, я сделал своеобразную кодировку - надел полоски 1,5 мм термоусадочной трубки. Количество желтых полосок означает номер канала, красный цвет проводов +5 В, черный без маркировки - GND. Номера каналов ESC также распределены по цветам.

fotki.yandex.ru/users/steindenis/view/907491/

fotki.yandex.ru/users/steindenis/view/907492/
Решил собрать плату контроллера БК подвеса. В качестве основы - немецкий Martinez, немного подправленный. Изготовление печатных плат заказывал в Китае.

fotki.yandex.ru/users/steindenis/view/907579/

fotki.yandex.ru/users/steindenis/view/907580/

fotki.yandex.ru/users/steindenis/view/907581/

fotki.yandex.ru/users/steindenis/view/907582/

fotki.yandex.ru/users/steindenis/view/907583/
Плата собрана и проверена. Теперь ее, как и все остальные электронные узлы, покрываю защитным лаком - все тот же Plastik 71.

fotki.yandex.ru/users/steindenis/view/907584/
*********************
Для защиты силиконовой изоляции проводов от повреждения и возможного короткого замыкания на раму, я использовал защитный чулок.

fotki.yandex.ru/users/steindenis/view/907450/

fotki.yandex.ru/users/steindenis/view/907452/

В итоге, были подготовлены все 4 балки с двигателями, к электрической разводке и установке на пластину.



Следующий этап - подготовка к пайке проводов от двигателей к ESC Quattro. Плата Quattro была покрыта лаком Пластик 71 в 9 слоев с сушкой по 30 минут в духовке.

fotki.yandex.ru/users/steindenis/view/907464/
fotki.yandex.ru/users/steindenis/view/907463/
Силовые провода распаяны. Места пайки тоже покрываю лаком.

fotki.yandex.ru/users/steindenis/view/907469/
Провода, ведущие к АКБ я выбрал 12 AWG. Параллельно им 18 AWG пойдут к бортовой электронике - на резистивный делитель датчика телеметрии, питание передатчика 5,8 ГГц.

fotki.yandex.ru/users/steindenis/view/907470/
К 4 входам ESC PWM распаяны МГТФ провода, обтянутые тонкой термоусадкой. Они будут припаиваться напрямую к плате полетного контроллера.

fotki.yandex.ru/users/steindenis/view/907471/

fotki.yandex.ru/users/steindenis/view/907472/
****************************
Итак, продолжение - уже Часть 3. Здесь, предыдущая статья.
Примерил модуль GPS.

fotki.yandex.ru/users/steindenis/view/907360/
Перед тем, как произвести финальную сборку модуля GPS, я покрыл плату и антенну лаком, в несколько слоев.

fotki.yandex.ru/users/steindenis/view/907359/
Вот так, выглядит самая верхняя часть X4-01

fotki.yandex.ru/users/steindenis/view/907362/

fotki.yandex.ru/users/steindenis/view/907363/
Большая часть монтажа электроники X4-01 предполагает пайку, тем не менее, пришлось ставить разъем на модуль GPS, для упрощения сервисного обслуживания. Я припаял стандартную гребенку 2,54мм. Место пайки, вместе с кабелем облепил ПКЛ - поликапролактоном. В отличии от термоклея он много жестче - напоминает полиэтилен высокого давления.

fotki.yandex.ru/users/steindenis/view/907364/

fotki.yandex.ru/users/steindenis/view/907365/

fotki.yandex.ru/users/steindenis/view/907366/
Пластины подсохли ( всего, я нанес 2 слоя краски). Теперь, можно браться за самое приятное - сборка рамы. К этому моменту я готовился несколько месяцев. Ставить буду алюминиевые хомуты-зажимы под трубу 12 мм. Один такой хомут состоящий из 2-х половинок весит в районе 2 грамм. Для тех, кто будет искать нечто подобное, советую искать на Ebay.com с ключевыми словами “fixture carbon tube”. Там будет крепеж под разные трубы.

fotki.yandex.ru/users/steindenis/view/907443/
Отверстия в хомутах - 2,5 мм. У меня была нержавейка 2,5 мм имбус, цилиндр. Пока решил использовать его, но в будущем хочу поставить нержавейку с плоской (сферической) головкой, так эстетичнее и меньше будет цепляться за посторонние предметы.

Любопытство вынудило вставить трубки в посадочные места, чтобы наконец, хотя бы примерно ощутить реальные габариты будущего коптера.

После того, как любопытство удовлетворено, устанавливаю крепления двигателей на лучи. Здесь, и вообще во всех местах, где встречаются хомуты-зажимы, я вставлял между балкой и самим хомутом полоску наждачной бумаги с зерном 1500-2000. Это позволяет предотвратить проворачивание конструкции на полированной карбоновой трубке. Грани карбоновых труб я округлил с помощью наждачной бумаги, чтобы исключить острые края.


fotki.yandex.ru/users/steindenis/view/907447/
Теперь, пришло время установить двигатели на балки.


********************************
Продолжение. Часть 1 - здесь.
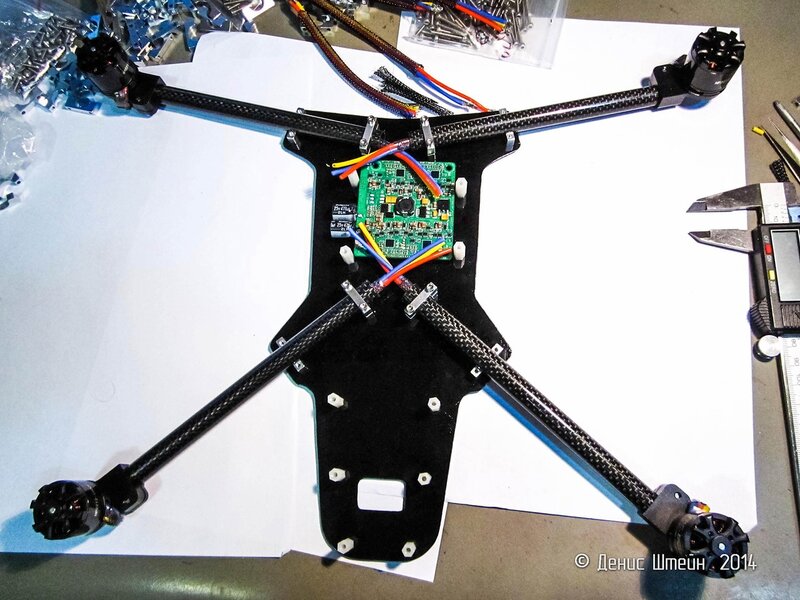
Вернусь к конструкции рамы квадрокоптера. Конструкция коптера такова, что ESC Quattro 25x4 располагается между двумя самыми нижними пластинами коптера. Также в этом пространстве располагается приемник с телеметрией FRSky D8R-II plus, стандартная “пищалка” монитор АКБ - окно семисегментного индикатора направлено вниз. Кроме того, рядом находится мощный светодиодный индикатор (проблесковый маячок) с пищалкой, подключаемый к полетному контроллеру - Rabbit II.
Плоская часть днища коптера позволяет закрепить элемент положительной плавучести (плотный пенопласт). Специальная опция - когда съемки большей частью времени проходят над водой и это позволит обойтись без вызова водолазов, в случае возникновения аварии.

fotki.yandex.ru/users/steindenis/view/906142/

fotki.yandex.ru/users/steindenis/view/906143/
Из изображений видно, что рама коптера состоит из трех пластин, самая верхняя - является задемпфированной частью. Демпферы работают на сжатие и расположены таким образом, чтобы исключить появления раскачки. Для повышения эффективности виброгашения, а также отсутствия резонансов, на верхней палубе расположены - силовая батарея, полетный контроллер - Rabbit II, под полетным контроллером установлена плата контроллера БК подвеса, рядом находится FrSky хаб сбора данных, передатчик 5,8 ГГц, модуль OSD. Учитывая, что весь листовой материал рамы квадрика будет 1мм, то для повышения жесткости, я установил карбоновые трубы диаметром 12мм во всю длину верхней пластины. На окончании верхней палубы, установлен квадратный алюминиевый профиль 15мм. Этот профиль будет выполнять функцию крепления БК подвеса. Сам БК подвес камеры GoPro 3+, о котором пойдет речь позже, является противовесом, так что точка центра тяжести будет приходиться на место расположения IMU. У Rabbit II, плата IMU находится отдельно от процессора STM32F103.

fotki.yandex.ru/users/steindenis/view/906144/

fotki.yandex.ru/users/steindenis/view/906145/

fotki.yandex.ru/users/steindenis/view/906146/
В 6 различных точках монтажа силиконовых демпферов, я предусмотрел страховочные болты МЗ с шайбами из стеклотекстолита. Назначение этих крепежных элементов - не дать отделиться верхней палубе от основной рамы коптера при нештатных ситуациях (авариях). Кроме того, затягиванием болтов, можно изменять степень прижима верхней палубы к раме X4-01. Всего, используется 12 штук силиконовых демпферов.
Теперь, я расскажу о том, как я изготавливал детали рамы квадрокоптера, здесь все было еще более сложно.
Изначально, я планировал использовать листовой карбон 1мм толщиной. Для этих целей, я купил на Ebay у продавца carbonmods-uk приличную пачку карбона - тем более, что кричащее название лота не оставляло сомнений - Real Carbon Fibre/Fiber Sheet in 1mm A4 (Hard, Rigid Panel Not Vinyl Wrap). В итоге, получил я нечто, чтобы дать качественную оценку изделию, цензурных слов у меня не находилось. Вкратце - сверху огромный толстый слой смолы, такой, что он трескался при малейшем изгибе листа, под толстым слоем смолы, находился очень тонкий слой углеволокна, и явно не 3К. Под этим волокном, находился толстый слой светлого вещества (кремового цвета) похожего на прессованную туалетную бумагу. В итоге - товар, аж в октябре был отправлен назад, деньги за него продавец не вернул, в январе я с помощью Сбербанка РФ открыл чарджбек, так, что возможно в ближайшие месяцы система VISA отберет мои деньги у этого мошенника. Вся эта история, длившаяся с сентября месяца и не получившая завершение по сей день, очень сильно затормозила процесс постройки квадрокоптера.
В декабре месяце, я заказывал пластину карбона 1,5мм с Китая. У китайцев, оказался товар высокого качества, в отличии от английского. Но он был 1,5мм. Я отложил этот кусок для посадочных шасси, если они вообще понадобятся.
Итак, материал, который я выбрал в конце, концов - был фольгированный стеклотекстолит 1мм FR4. Удалось купить большие листы 200 на 300 мм, одностороннего и двустороннего. Я вытравил медь, это дало некоторую экономию в весе. Вес медной фольги одной стороны листа 200x300 мм составлял - 13 грамм. Учитывая, что выпиливать все детали я буду вручную, то использование FR4 позволило смело делать термоперенос рисунка отпечатанного на лазерном принтере. С карбоновым листом, я подозреваю были бы проблемы, так как рисунок тонера был бы слабо виден на черной поверхности листа.
Детали из трехмерной модели, в виде чертежей, я отпечатал на термотрансферной бумаге Ломонд. С помощью переделанного ламинатора А3 формата, я перенес рисунок на FR4. Естественно, перед переносом рисунка я отшлифовал поверхность листов, обезжирил, так чтобы улучшилась адгезия тонера.

fotki.yandex.ru/users/steindenis/view/907033/
Среди всех листов стеклотекстолита FR4, попался один лист подозрительного цвета. Я сразу вспомнил советский гетинакс - естественно гетинакс тут вообще не подойдет. Я пробовал взвешивать, отламывать куски этого материала, фрезеровать - в итоге вес оказался точно как у обычного желто-белого FR4, прочность на излом примерно тоже такая же - я решил применить и этот кусок.

fotki.yandex.ru/users/steindenis/view/907035/
Выпиливал лобзиком, кое-где дорабатывал фрезой, финишная обработка делалась надфилями.

fotki.yandex.ru/users/steindenis/view/907036/
После того, как три пластины были готовы, я зачистил их наждачной бумагой еще раз, обезжирил и покрасил в черный цвет.

fotki.yandex.ru/users/steindenis/view/907037/

fotki.yandex.ru/users/steindenis/view/907038/

fotki.yandex.ru/users/steindenis/view/907039/

fotki.yandex.ru/users/steindenis/view/907040/
Пока краска на пластинах подсыхала, я занялся модулем GPS. Я выбрал отдельный модуль GPS, потому что он уже имеет в своем составе полосовой фильтр, улучшающий избирательность приемного узла. Кроме того, вместе с этим получаем удобный, круглый корпус из толстого пластика. Модуль оснащен светодиодом отображающий фикс спутников. Этот GPS имеет эластичный силиконовый 4-х проводной кабель - сигналы стандартные - +5V, RX, TX, GND. GPS модуль, который поставляется вместе с контроллером Rabbit - не имеет ничего из вышеперечисленного.

fotki.yandex.ru/users/steindenis/view/907358/

fotki.yandex.ru/users/steindenis/view/907368/
Этот модуль GPS имеет чип UBX-G6010-ST с EEPROM на плате.
Самое больное место этого модуля - просто ужасная пайка проводов. Такое ощущение, что паяли с закрытыми глазами. 2 модуля, и оба распаяны - один хуже другого.

fotki.yandex.ru/users/steindenis/view/907367/

fotki.yandex.ru/users/steindenis/view/907357/
Выпилил самую верхнюю пластину, которая является креплением для модуля GPS, а также некоторую мелочь. Так как стеклотекстолит был фольгированным, прежде чем травить всю медь, я решил нанести рисунок будущего экрана под GPS - хуже от этого не будет, вес практически не добавит, зато, учитывая сверхплотную компоновку электроники, можно ожидать появление положительного эффекта. Перед тем, как красить эти детали, у меня появилась идея отойти от первоначального общего цвета коптера - черного, и внести некоторое разнообразие.

fotki.yandex.ru/users/steindenis/view/907354/

fotki.yandex.ru/users/steindenis/view/907355/
Впоследствии, я закрасил экран черным цветом.

fotki.yandex.ru/users/steindenis/view/907356/
Для “заземления” экрана, я вывел отдельный короткий провод от контакта GND.

fotki.yandex.ru/users/steindenis/view/907361/
********************************
В этой записи, я буду вести описание процесса постройки съемочного квадрокоптера для камеры GoPro 3+ Black. Здесь - Часть 2
Сам процесс, начиная с базового концепта длится аж с сентября месяца 2013 года. Очень много времени уходит на покупку и ожидание комплектующих - некоторые вещи теряет почта, некоторые “присваивает” таможня, китайцы высылают не то, что нужно и так далее… Кое-что приходится менять в процессе. Порой, некоторые этапы пришлось начинать с нуля - вообщем нормальный процесс, когда почти все делается с нуля.
Задача - сделать съемочный квадрокоптер, с минимально возможными габаритами, нескладной, максимально надежный, по возможности - как можно более отказоустойчивый, позволяющий оперативно использовать для съемок. Кроме того, в идеале - отсутствие висячих проводов, разнообразных нейлоновых стяжек (которые имеют свойство, со временем самостоятельно лопаться, при длительном воздействии солнечного света, перепада температур ) и прочих, уже прочно вошедших в быт, атрибутов самодельных квадрокоптеров.
В коптере прежде всего хотелось бы видеть:
- Надежную, эффективную виброразвязку для подвеса камеры.
- FPV систему 5.8 ГГц с модулем OSD для передачи картинки на самодельный миниатюрный монитор находящийся на пульте управления.
- Надежный (с дублированием) контроль разряда АКБ. В итоге, я получил как минимум три различных системы оповещения о состоянии АКБ. Это сделано для снижения риска аварии из-за вовремя незамеченного разряда силовой батареи.
- Наконец - обычные в наше время функции удержания позиции по спутникам GPS, принудительный возврат коптера к месту старта, система failsafe и многое другое.
В конструкцию X4-01 я постарался внести весь полученный за последние годы опыт коптеростроения. Кроме того, это должна быть первая модель, которая будет оформлена в угоду эстетики. Раньше этому придавалось меньше значения - хотелось получить практический результат, невзирая на внешний вид модели.
Эта модель, при минимально возможных габаритах, должна обладать хорошим запасом тяги, с полезной нагрузкой в виде самодельного двухосевого БК подвеса для камеры GoPro 3+ Black, обязательно с штатным домиком. Конструкция рамы коптера должна 100% исключить возможность попадания концов пропеллеров и каких-либо других частей ЛА в кадр. Потребляемый коптером ток я оставил на второй план -естественно, с маленьким коптером, от которого требуется грузоподъемность, экономии не будет - все сделано в угоду габаритам коптера. На сегодняшний день, у меня есть все основания считать, что будущий проект, при взлетной массе в 1400 грамм, пропеллерах 8х4.5 и аккумуляторе 3700 мА.ч будет находиться в воздухе как минимум 11 минут. Несмотря на то, что, эффективность моей системы обещает быть в районе 7,5 -8 гр\Вт, я посчитал эту цифру очень неплохой с практической точки зрения - этого полетного времени будет с огромным запасом хватать для выполнения поставленных задач.
В результате, после долгих бессонных ночей, были получены 3D модели подвеса и коптера под уже имеющиеся некоторые комплектующие. Все детали рамы и подвеса планировалось выпиливать лобзиком, финишная обработка надфилями. Вот что вышло :

fotki.yandex.ru/users/steindenis/view/906141/

fotki.yandex.ru/users/steindenis/view/906139/

fotki.yandex.ru/users/steindenis/view/906140/
Итак, под планируемый взлетный вес в 1400 грамм, изначально мною была выбрана следующая основа - карбоновые пропеллеры 8 дюймов, шаг 4.5. Моторы это отдельная долгая история, если вкратце - я так и не нашел нормальных моторов для своей задачи, которые бы отвечали всем моим требованиям - Обязательное отсутствие цанговых креплений - только резьба под гайку nylock М6 или М5 с прямой установкой пропеллера, магнитопровод, конструкция двигателя должна допускать пиковую мощность как минимум 180 Вт, чтобы избежать возможного перегрева моторов и деградации магнитов. Обороты двигателя должны быть на уровне 16 000 оборотов на холостом ходу при питании 3S - примерно 1400KV. Так как в конструкции квадрика я планировал использовать карбоновые трубы 12мм, то были найдены соответствующие мотормаунты в виде литой конструкции с хомутом - посадочное место двигателя должно было соответствовать этим креплениям. Почти всем требованиям отвечал двигатель Rctimer HP2212. Только максимум, что существует - 1000 KV.
В итоге я решил перематывать эти моторы, заодно менять подшипники на более качественные.
Заказал моторы HP2212-1000 у обожаемого Rctimer - с целью начать эксперименты, замены обмоток, замеры статической тяги, токов, оборотов, температуры, уровня вибраций. Трек на посылку оказался очень странным, нигде не трекался. Я успел на 45 сутки открыть кейс на Пайпале, вместе с продавцом ждали еще недели 2, он мне последовательно давал еще 2 трека, один из которых явно был не мой. В итоге, Пайпал вернул деньги за покупку. Сейчас уже прошло 5 месяцев с этой первой покупки - моторы канули в неизвестность. Сразу после получения денег назад, я снова купил у еще более обожаемого Rctimer партию моторчиков. В этот раз с доставкой EMS. Дорого, зато получил через 2 недели. Приступил к препарированию моторов. Rctimer обещал японские подшипники, по факту оказались китайские, классом не выше ABEC3. Оно и понятно - чего ожидать за 18 долларов…

fotki.yandex.ru/users/steindenis/view/906314/
Штатная обмотка была выполнена в два провода. Само исполнение обмотки, а также качество провода внушили недоверие, так что я без зазрения совести стал срезать\сматывать старую обмотку на новом двигателе.

fotki.yandex.ru/users/steindenis/view/906318/
Вот подопытные образцы без статоров.

fotki.yandex.ru/users/steindenis/view/906315/

fotki.yandex.ru/users/steindenis/view/906316/

fotki.yandex.ru/users/steindenis/view/906317/
Статоры снимаются просто изумительно. Я придумал следующий способ - прикрутил к новым моторам штатные крестовины, роторы снял, стопорные кольца и пластиковые прокладки убрал в пакетик от утери, сам мотор уже без ротора с крестовиной притянул на 4 винта в кусок доски. Далее взял фен - температура 250, грел без фанатизма. теперь ключевой момент - в прорезь статорного железа добавлял пару капель Flux-off, после этого брал большие пассатижи и толстый кусок бумаги ( сложенный лист А4) обернул статорное железо и начинал вращать, а затем и тянуть, пытаясь снять статор. Растворитель flux-off здесь очень сильно облегчает задачу - с ним все гораздо легче.
Таким же способом я снимаю статорное железо с моторов для БК подвесов - опять же для БК подвеса я не нашел готовых моторов, которые бы подошли мне, поэтому я дорабатывал и перематывал силовые двигатели. Но об этом позже.
Несколько слов о подшипниках. В этих моторах применяются шарикоподшипники с размерами 3x8x4mm. Это тоже больной вопрос, так как штатные подшипники работают в среднем месяца полтора -два. Кроме того, качество родных подшипников варьируется так, что некоторые производят приличный акустический шум, а некоторые приятный равномерный шум без рокота. Я принял решение менять подшипники сразу на другие, более высокого класса - ABEC-5. Изначально, я естественно пытался найти EMQ класс, по более-менее вменяемой цене, ибо только EMQ способны нормально работать в подобных изделиях. Но найти такие подшипники оказалось не так просто - списавшись с заводом по производству подшипников в поднебесной империи, я выяснил, что они только планируют выпускать подшипники такого класса. Сейчас рынок завален обычными керамическими или стальными подшипниками. Как вариант, оставался - S693-2RS, цена за один подшипник 25 долларов, + доставка отдельно. Каждый выйдет в районе 1 000 руб за штуку, т.е. 8 тысяч на 4 двигателя - дороговато выходит. В данной ситуации, оптимальный вариант конечно - керамика S693ZZ, но каждый подшипник будет стоит 500 рублей, если покупать в США. Т.е. на 4 двигателя, только на подшипники нужно 4 тысячи рублей. В качестве эксперимента, я выбрал более дешевый вариант, тоже ABEC-5, только стальные - фирмы Fushi - 693ZZ ABEC-5. Здесь выходит цена - 250 рублей за 10 штук. Слишком дешево… Но с другой стороны, других вариантов нет - либо очень дорого, либо очень дешево + все же не noname, как большинство дешевых изделий. На этом я и остановился, пока китайские заводы наконец не выпустят EMQ класс.
Теперь о перемотке двигателей. Мотать буду в одну жилу, виток к витку. Я выбрал эмалированный провод 0,55 мм. Тем более, что скин-эффект здесь можно не брать в расчет - толщина скин слоя будет примерно равна диаметру обмоточного провода.
Итого у меня вышло по 9 витков на зуб. Учитывая, что мне нужно большее количество оборотов, чем у готового мотора 1000 KV, я намотал меньше витков чем было - 9 против 11. Так как моторы имеют 14 полюсов, я мотал по этой схеме - AabBCcaABbcC. Схема соединения - дельта. Начало каждой из трех фаз я обозначал узелком на проводе, в свою очередь первый зуб обозначил маркером edding, чтобы не стерлось в процессе намотки. Таким образом я никогда не запутаюсь где какой вывод, фаза.

fotki.yandex.ru/users/steindenis/view/906322/

fotki.yandex.ru/users/steindenis/view/906321/

fotki.yandex.ru/users/steindenis/view/906320/

fotki.yandex.ru/users/steindenis/view/906319/
Естественно, после того, как обмотки были готовы и проверены на надежность - утечку тока на статорное железо, межвитковое замыкание, вся обмотка была залита лаком Plastik 71 в 9 слоев с промежуточной сушкой в духовке по полчаса.

fotki.yandex.ru/users/steindenis/view/906546/

fotki.yandex.ru/users/steindenis/view/906547/
Еще до намотки остальных двигателей, я снял различные показания с первого подопытного. Уровень шума и вибраций приятно удивил, данные по акустическому шуму снимал аналоговым акселерометром, MEMS по своей структуре фактически является микрофоном. MEMS датчиком сложно оценить вибрации из-за акустического эффекта. Измеритель уровня вибраций - тоже самодельный датчик на базе оптического стабилизатора мыльницы (используется обратный эффект). Позже, из 4 двигателей, 2 потребовали нанесения небольших кусочков клейкой ленты. В целом, подшипники Fushi создают гораздо меньше шума, нежели штатные, установленные на заводе в HP2212. По идее, установка EMQ подшипников, очень значительно улучшила бы показатели. Но это на будущее.
Собрал на макетке, на скорую руку оптический тахометр с экраном 1602. Прибор показал 16 320 об. при 100% газа, на холостом ходу. Ток холостого хода двигателей - 0,9 А.
Итак, питание 3S, пропеллер карбоновый 8x4.5
- 50% газа, создаваемая тяга - 403 грамм, при токе в 5,8 А
- 100% газа, создаваемая тяга - 973 грамм, при токе в 20,1 А
Собственно стало ясно, что по идее, для завершения эксперимента, следовало бы добавить по 1 витку на зуб, и сравнить показания тяги на 50% газа. Но толщина имеющегося провода - 0,55 мм не позволяла вместить более 9 витков на зуб, без риска повредить эмалевую изоляцию. Учитывая, что нужно было заказывать чуть более тонкий провод или искать совсем тонкий, для намотки в виде литцендрата, я отложил эту затею на будущее.
Припаял гибкий силиконовый провод AWG18 к приготовленным выводам двигателей. Места пайки покрыл лаком в несколько слоев. После высыхания лака, надел термоусадочную трубку. После установки статоров с проводами, я произвел фиксацию проводов несколькими оборотами крепкой толстой нити.

fotki.yandex.ru/users/steindenis/view/906548/

fotki.yandex.ru/users/steindenis/view/906549/

fotki.yandex.ru/users/steindenis/view/906550/

fotki.yandex.ru/users/steindenis/view/906552/
*****************************
продолжение - Часть 2 - rcopen.com/blogs/125836/18422