Activity
Что-то не так с этой Почтой России…

Подарили мне самый, наверное, народный GPS треккер TK-102, или IB-GT102.

Дело в том, что TK-102 и IB-GT102 хоть и собраны в одном корпусе и на одной плате - на самом деле разные треккеры.
В общем, при получении мной этого треккера убил я пару дней на подключение его к сервису онлайн отслеживания GPS-Trace.
Возможно сервис не самый лучший и не самый удобный, я его взял как первый попавшийся и он меня, в общем-то, вполне устроил, потому и не стал даже пробовать другие.
Сервис позволяет подключить бесплатно либо один автомобильный треккер, либо до пяти персональных.
Я всё подключил, у меня всё заработало и забросил я треккер на долгое время.
Вчера захотел вновь поиграться с ним и с удивлением обнаружил, что не могу войти в сервис со свое учётной записью. Недолгое гугленье дало ответ, что если аккаунт не заходил в сервис больше трёх месяцев (!), то он автоматически полностью удаляется.
Чтож, регистрируюсь заново и вижу пустоту. Разумеется мой треккер не подключен.
Снова эти круги ада.
Треккер управляется через SMS команды. Кладём побольше денег и приступаем.
Официальный список команд можно посмотреть, например в этом мануале.
Однако далеко не все команды и не все функции заявленные в мануале будут работать. Этих треккеров - сотни клонов на клонских клонов.
Итак, отправляю команду “begin123456” (123456 - это пароль по умолчания и я его не менял) - в ответ приходит “password err”…
Что-то сбилось и в самом треккере. Пару дней я бился, вводя самые разнообразные секретные комбинации, но в ответ всегда была ошибка. Уже отчаявшись написал тут на форуме и мне предложили ещё три варианта команд.
“reset123456” я пробовать не стал, ибо пробовал её раньше и получал “reset fail”. Попробовал “restart123456” и “reboot123456”. В ответ треккер молчал. Отчаявшись, я таки послал снова и “reset123456” и получил в ответ заветное “reset ok”. Отлично! Ожил!
Сбрасываем настройки: “begin123456”. Ответ “begin ok”.
Подключаем GPRS: “gprs123456”. Ответ “GPRS ok”.
Выставляем точку доступа. У меня оператор Теле2. У ниж не требуется логин и парольдля точки доступа. Потому просто отправляю “apn123456 internet.tele2.ru” и получаю в ответ “apn ok”.
Если нужно установить логин и пароль - в мануале есть команды для этого.
Потом выставляем интервал отправки данных о местоположении: “t020s***n123456”. В ответ так-же “t020s***n ok”. Эта команда выставляет интервал отправки в 20 секунд. Меньше у меня установить не удалось - вместо “ok” возвращается “fail”. Ну да ладно, 20 секунд - вполне адекватный интервал.
А вот дальше начинается самое интересное.
Нужно направить эти сообщения о местоположении на определённый адрес и с определённым портом. У GPS-Trace адрес сервера 193.193.165.166. А вот порт у каждой модели треккера (ну точнее не у каждой) - свой. Как узнать порт? Есть вот такая страничка с перечнем поддерживаемых устройств и портами для них. Ещё есть вот такой сервис. Треккеров там намного больше, чем в списке поддерживаемых GPS-Trace, но, как я понял, суть не в модели, а именно в том, какой у треккера порт. И если найти другую поддерживаемую модель с этим-же портом - вполне вероятно, что всё заработает.
Как узнать свою модель треккера? С коробки, из мануала, из гугла… Я просто забивал в поисковик “GPS треккер” и искал похожие по картинкам. Вычленил в итоге две модели. gurtam.com/ru/gps-hardware/personal/xexun-tk-102 и IB-GT102.
Казалось-бы, один и тот-же девайс под разными названиями? Ан нет. Порты разные.
Пока ковырялся со сбросом решил разобрать и посмотреть, что-же там внутри.
А там вот что:

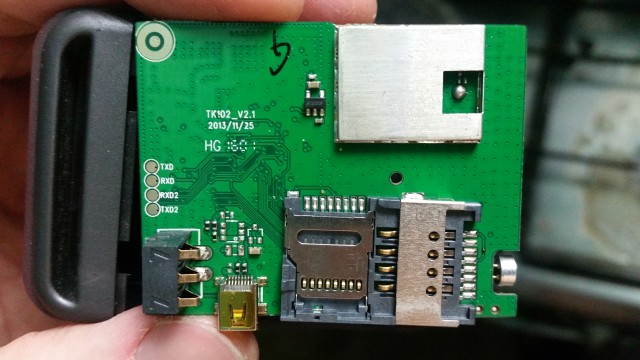
На плате написано TK102. Казалось-бы вопрос решён. Но нет. Китайцев так просто голыми руками не возьмёшь…
Есть сервис, который позволяет “пропинговать” наш треккер.
Надо направить данные с треккера на адрес 193.193.165.167.
Для этого пишем “adminip123456 193.193.165.167 20157”, где 20157 - это порт, который мы нашли на страничке с описанием треккера TK102. Получаем в ответ “adminip ok”.
Заходим на сервис и ждём. Среди прочих в списке должен появиться наш треккер. Проще всего опознавать его по столбику Unique ID - там будет написана какая-то часть IMEI нашего треккера. Если наклейки с IMEI нет, то в мануале есть команда для получения онного.
Появиться в списке наш треккер может в любом месте - совсем не обязательно в начале.
Ждём-ждём… И не дожидаемся. Пробуем другой порт - 20504 от IB-GT102. “adminip123456 193.193.165.167 20504”. Получаем “adminip ok”, возвращаемся на сервис и снова ждём. И через некоторое время обнаруживаем в списке наш IB-GT102, вопреки маркировке платы.
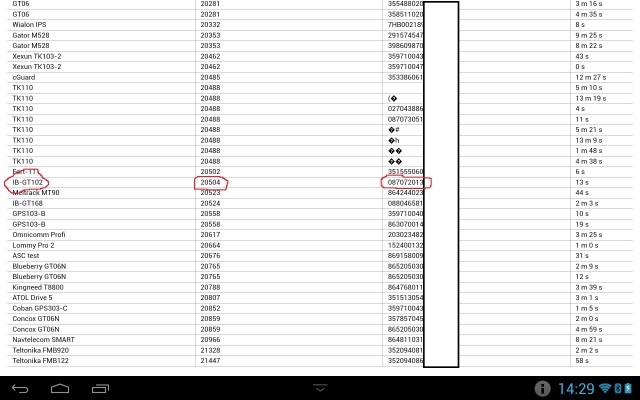
Значит верный порт 20504. В поле Unique ID последние 11 цифр IMEI и перед ними стоит двенадцатая цифра “0”. Запомним этот ID, он нам ещё пригодится.
Отправляем треккер обратно на сервер GPS-Trace. “adminip123456 193.193.165.166 20504”. Получаем “adminip ok”.
Теперь треккер настроен.
Заходим на сайт gps-trace.com/ru/index.html и нажимаем “Перейти к мониторингу”.
Нажимаем внизу справа пиктограму человечка с плюсиком.
Заполняем поля.
Выбираем модель треккера. Если нашей модели нет, можно попробовать любую другую с таким-же портом. Заработает или нет - я не знаю. Но попробовать можно.
Unit name - любое название латиницей, которое будет вам удобно.
Phone - телефонный номер треккера в формате +79ХХХХХХХХХ
Unique ID - тот самый кусок IMEI который нам высветился.
Password - пароль треккера. Если не меняли - 123456.
Можно выбрать иконку. Сохраняемся.
Через минуту-другую иконка будет зелёной, что означает что треккер вышел на связь и если есть сигнал GPS - местоположение треккера отобразится на карте.
Нажав на флажок можно посмотреть архив треков (вроде за неделю).
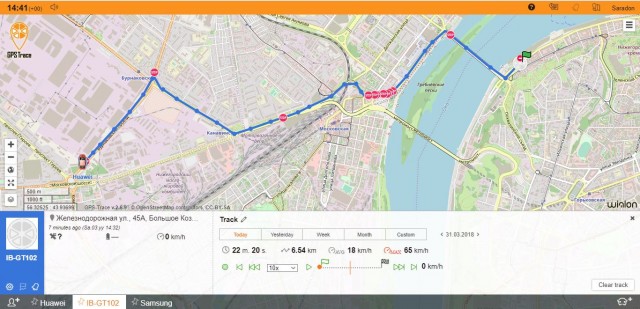
Колокольчиком можно настроить различные уведомления по событиям (превышение скорости, выезд за геозону) - не игрался ещё, но интересный функционал.
Так-же есть приложение мониторинга для Android.
Но и это ещё не всё. Есть ещё приложение GPS-Trace Tag, которое делает треккер из любого устройства на Android - достаточно ввести свои учётные данные и девайс автоматически появится в сервисе отслеживания.
Никак не дойдут руки посмотреть сколько треккер жрёт трафика за день.
Как проделаю тесты - дополню дневник.
Напишу пару строк в первую очередь для себя, а во вторую для тех, кто хочет попробовать прошивку Байчи для облегчения входа.
Оговорюсь сразу - это не мануал, как надо делать, это описание моего опыта.
Все опыты проводил на передатчике и приёмнике OrangeRX от Хоббикинга. Если у вас комплект от Flytrone - это тоже самое. Прошивки для передатчика 1 ватт и 100 милливатт одинаковые.
У Байчи есть прошивки и для других передатчиков и приёмников.
Что конкретно и для чего описано на странице ниже и в файле read.my
Тут расположен оригинальный мануал на передатчик.
Тут расположен оригинальный мануал на приёмник.
Итак, вот мой архивчик со всем необходимым для загрузки.
Подразумевается, что мы уже умеем подключать передатчик и приёмник и прошивать в него пусть тот-же OpenLRSng.
Если нет - то на Байчи ещё немного рановато.
Итак, у нас уже установлен Google Chrome и в него добавлен конфигуратор OpenLRSng.
На всякий случай в архиве есть папка с конфигуратором на русском языке.
Подключаем передатчик, запускаем конфигуратор.
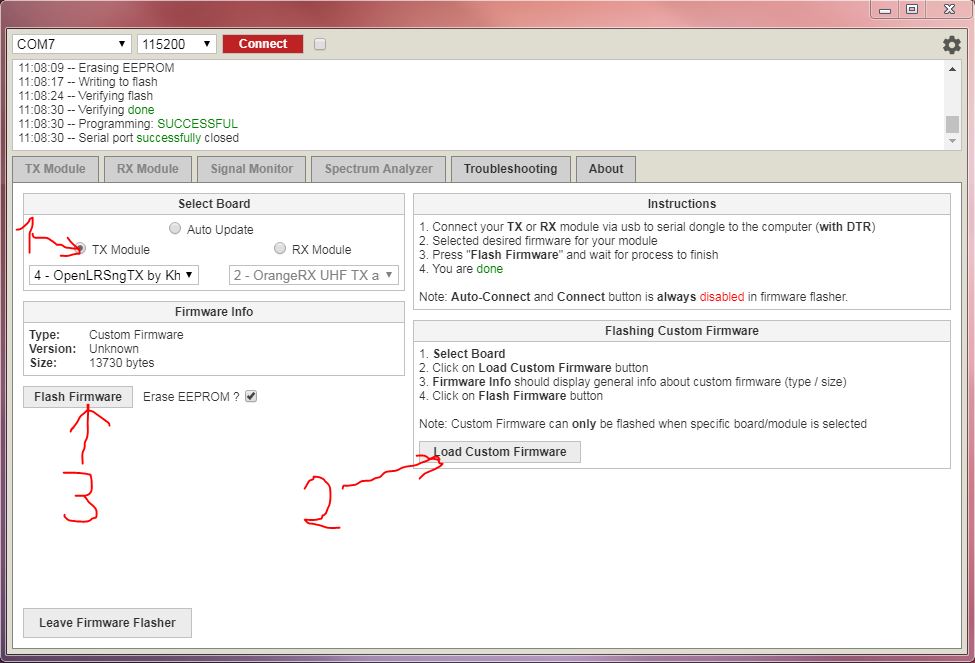
Нажимаем “Firmware Flasher”.
Там ставим точку в чекбоксе “TX Module”, но в выпадающем списке ничего не выбираем.
Нажимаем “Load Custom Firmware”, выбираем в архиве файл TX.hex (либо RX as TX.hex, если хотим прошить модуль приёмника в качестве передатчика) и затем “Flash Firmware”.
Сверху в окне лога должны быть такие строки.
11:01:06 -- Serial port successfully opened with ID: 1
11:01:06 -- Chip recognized as ATmega328P
11:01:06 -- Erasing EEPROM
11:01:15 -- Writing to flash
11:01:21 -- Verifying flash
11:01:27 -- Verifying done
11:01:27 -- Programming: SUCCESSFUL
11:01:27 -- Serial port successfully closed
Если всё так, значит передатчик у нас успешно прошит.
Сразу прошьём и приёмник.
Алгоритм действий точно такой-же, только ставим точку в чекбоксе “RX module”.
Прошивку, соответсвенно, выбираем RX.hex (аналогично, если хотим прошить передатчик в качестве приёмника - то TX as RX).
Теперь можно переходить к настройке.
Вновь подключаем передатчик.
В архиве есть терминальная программа “PUTTY”.
Открываем папку, запускаем PUTTY.exe
Можно вести ярлык в удобное место - программка нам часто пригодится в процессе настройки.
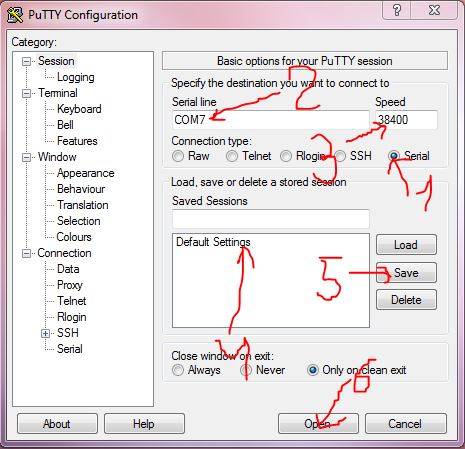
Видим перед собой стартовое окно терминала.
Выбираем “Serial”, пишем номер нашего COM порта (пишем циферку - никаких чекбоксов. Это терминал, детка).
Speed пишем 38400. Затем выделяем пункт Default setting и жмякаем “Save” - теперь не надо будет вводить всё это повторно.
В идеале увидим вот такое окно.
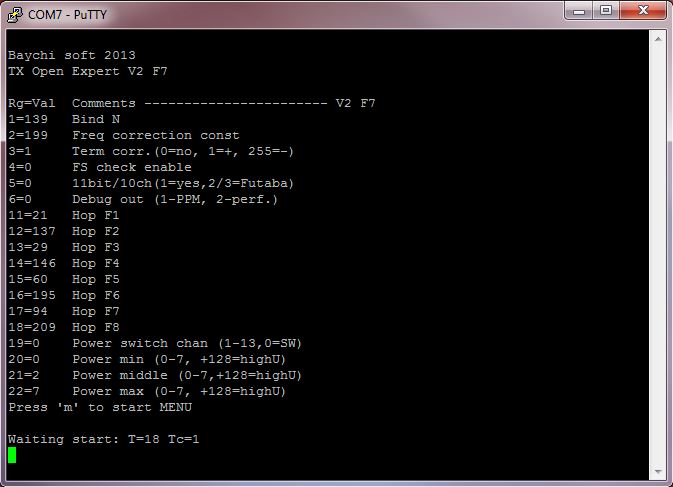
Тут нам стОит познакомится со словом, которым профессионалы пугают новичков - регистры.
На самом деле регистр - это просто номер строки. У каждой строки есть значение - цифра после номера регистра.
Например первая строчка “1=139” Значение первого регистра - 139. Дальше идёт описание, для чего этот регистр нужен.
Вся настройка заключается в смене этих самых значений регистров.
Чтобы изменить значение регистра в терминале нужно набрать сначала номер регистра - например 3, нажать ENTER, потом нужное нам значение - например 0 и снова ENTER.
Значение поменяется.
Иногда у меня бывает так, что все значения регистров - 255. Тогда придётся менять их все вручную.
Чтобы менять их нам нужно войти в меню.
Просто нажимаем “M” или “m” в английской раскладке и ENTER.
У меня терминал всегда запускается в русской раскладке.
Теперь мы можем менять регистры, но пока рано…
Набираем команду “rebind” и нажимаем ENTER.
Подтверждаем “y” и снова ENTER.
Будут строки:
Try to new bind...
Freq/noise: 12/41 140/42 45/38 147/43 75/46 198/44 113/42 215/43
Bind N=1
У вас N будет равно другому значению - это приёмник просканировал эфир и выбрал для работы наиболее чистый канал.
Регистры с 11 по 18 - это тоже выбранные приёмником каналы для “прыжков”. Сильно заморачиваться не будем, оставляем всё как есть.
Если будет сообщение “to noise!” - значит что шумовая радиообстановка слишком плоха - много помех. Можно пробовать ещё и ещё - вероятнее всего в какой-то момент передатчик найдёт себе более-менее чистый канал.
И так, по регистрам.
1 - разобрались. Номер канала привязки.
2 - коррекция частоты. Пока оставляем 199, потом мы к этому регистру вернёмся.
3 - Тепературная компенсация. Форумчане сказали, что никто не знает как оно работает и рекомендовали её отключить. Для отключения этому регистру нужно присвоить значение 0. (3 - ENTER, 0 - ENTER).
4 - отключает передачу при обнаружении FailSafe. Просто оставляем 0 и двигаемся дальше.
5 - Если мы хотим использовать PWM или PPM - оставляем 0, если SBUS - 2.
6 - Отвечает за выдачу отладочной информации. На функционал не влияет, можно будет поиграться потом, когда достаточно хорошо разберётесь с прошивкой.
11-8, как говорилось выше, каналы для “прыжков” Тут нам менять ничего не нужно.
19 - управление мощностью передатчика. Если вам зачем-то нужно понижать мощность передатчика, то это можно делать, например, с трёхпозиционного тумблера на пульте. Значения с 1 по 13 - это выбор канала, к которому в аппе привязан этот тумблер. Если поставить регистр 0 - будет работать физический переключатель на модуле. У Оранжа такого нет, но у Байчи есть рецепт, как можно приделать.
Если присвоить регисту значение 14 - то передатчик просто будет работать на максимальной мощности (точнее на мощности, прописаной в регистре 22).
20 - мощность передатчика при положении тумблера “минимально” - от 0 до 7. 0 - надо понимать, передача отключена, 1 - самая низкая мощность - 7 - самая высокая.
21 - всё тоже самое, что и для 20, но только для положения тумблера “средняя”.
22 - Значение для мощности “максимально”. Разумно, конечно, поставить тут максимум - 7. Кроме того, если в регистре 19 выставлено значение 14 (отключено управление мощностью). то мощность передатчика будет именно такая, как прописано в этом самом регистре 22.
Для, например, настроечных действий тут можно прописать минималку (у меня вот колонки у компа трещат при передаче, хотя понижение мощности не сильно помогает). Главное потом в боевых условиях не забыть вернуть параметр в максимальное значение.
Собственно, на этом настройка передатчика закончена.
Не плохо будет заскриншотить окно терминала с настройками - оно нам пригодится в будущем.
Можно ещё посмотреть шумовую обстановку.
Набираем “N” - у нас выскакивает три столбика цифр. (Четыре - первый столбик просто номер канала).
Цифры в столбиках должны быть как можно меньше. в последнем столбике, к примеру, хорошими значениями считается 30-40. Если 80 - плохо. Если выше 100 - то так летать нельзя. Помехи забьют всё управление. Борьба с шумами на модели - тема отдельной диссертации.
Отключаем передатчик от компьютера, вставляем в аппаратуру и включаем последнюю.
Если всё нормально и есть входящий протокол, то на модуле должен мигать диод.
Теперь можно подключать приёмник.
Подключив его к терминалу после прошивки сначала побегут непонятные строки:
$RL13 S=0 C=5 Rn=44
$RL14 S=0 C=6 Rn=47
$RL15 S=0 C=7 Rn=47
$RL16 S=0 C=8 Rn=42
$RL17 S=0 C=1 Rn=47
$RL18 S=0 C=2 Rn=43
Не обращаем внимания.
Меняем раскладку и так-же жмём “M” и ENTER.
Надо добавить, что на это действо у нас есть только 10 секунд. Не успели - переподключаем.
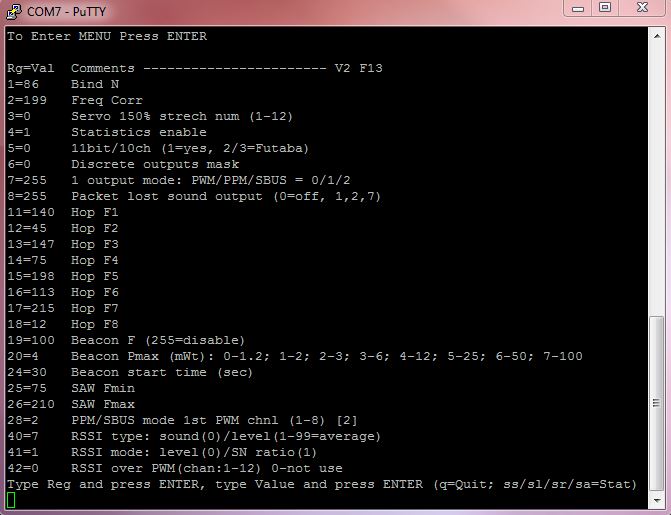
Нас встречает уже чуть более обширное меню.
Первое, что мы делаем - включаем стоящий в сторонке передатчик в “боевой” режим и набираем уже знакомую нам команду “rebind”.
Видим примерно такие строки:
Bind find start: Maxlevel[66]=57
Bind find start: Maxlevel[70]=60
Bind find start: Maxlevel[45]=190
45 75 215 12 198 147 113 140
Times: 1 4 5 2 0 3 6
Bind=1 Fcorr=197 Sequence: 45 147 75 198 113 215 12 140 End
$RL16 S=0 C=8 Rn=49
R=0 S=0 C=1 A=255 Rn=50
R=222 S=1 C=2 A=0 Rn=45
R=223 S=1 C=3 A=0 Rn=46
R=220 S=1 C=4 A=0 Rn=40
R=222 S=1 C=5 A=0 Rn=43
R=220 S=1 C=6 A=255 Rn=40
R=226 S=1 C=7 A=0 Rn=40
R=222 S=1 C=8 A=0 Rn=41
R=225 S=1 C=1 A=0 Rn=41
И так до бесконечности.
Перетыкаем передатчик, снова входим в меню и видим, что значения регистра 1 у нас теперь совпадает со значением этого-же регистра в приёмнике.
Если вдруг нет - то присваиваем это значение вручную (тоже самое, что и в передатчике).
Всё, система у нас условно забиндена. Почему условно? Потому что у нас не совпадают каналы для “прыжков”.
Открываем сохранённый скриншот и прописываем регистры с 11 по 18 вручную.
Теперь регистры 1 и с 11 по 18 у нас в приёмнике и в передатчике совпадают.
По идее регистр 2 - подстройка частоты, так-же должен совпадать с таким-же в передатчике (199), не должен. У меня после ребинда он стал 198 и я оставил это значение - позже скажу почему.
С первым и вторым регистром разобрались.
3 - расширение работы сервопривода - нам эти дебри не нужны. Оставляем 0.
4 - Сбор статистики работы приёмника. Полезная штука для отладки. Как оно работает лучше почитать в официальном мануале. Но есть одно НО. Оно пишет свой лог в EEPROM АТМеги, а количество циклов записи в неё ограничено. Причём не очень-то большим количеством этих самых циклов. В общем, при значении 1 - запись ведётся, при значении 0 - запись запрещена.
5 - Тоже самое, что и в передатчике. Ставим 0 - если хотим использовать PWM, или PPM и 2 если хотим использовать SBUS.
6 - просто оставляем 0 и двигаемся дальше.
7 - собственно, режим выхода. Если будем использовать PWM - 0, PPM - 1 и если хотим SBUS - 2.
8 - тоже просто оставим 0 и идём дальше.
11 - 18 регистры мы уже настроили на стадии бинда.
19 - Маяк. Значение 0 соответствует 433.075 МГц. Это первый канал LPD диапазона. Значение 255 отключает маяк.
20 - Мощность передачи маяка. Принцип тот-же, что и с мощностью передатчика. Значения от 0 до 7, где 7 - максимальная мощность.
24 - Время в секундах до старта вещания маяка после потери связи. От 0 до 255 секунд.
25 и 26 - границы SAW фильтра. Оставляем как есть.
28 - Сдвигает линейку PWM импульсов при активированном PPM или SBUS. Просто оставляем 2 - это удобно и адекватно.
40 - Переключение режима RSSI звук (0) либо аналог (1-99). По умолчанию коэффициент усреднения уровня 7 - его и ставляем.
41 - Режим аналогового сигнала RSSI. При 0 - выводится обычный аналоговый RSSI. При 1 - соотношение сигнал\шум. Оставим 1.
42 - Инжекция RSSI в канал управления. Значениями от 1 до 12 можно назначить канал, в котором вместо сигналов управления будут передаваться значения RSSI. При значении 0 эта функция отключена.
На этом настройка приёмника закончена.
Но есть ещё один момент, за счёт которого, как заявлено, мы и получаем заветные +30% дальности.
Подстройка частоты. Тот самый регистр 2 в передатчике и приёмнике.
Тут уместнее будет скопировать строки из официального мануала.
На приемнике можно подстраивать поправку частоты в рабочем режиме. Для этого после включения питания входят в меню, задают значение R2=0, выходят из меню (‘q’) при заранее включенном (для прогрева на 5-10 мин) передатчике. Наблюдая значение параметра A=, меняют поправку частоты клавишами ‘<’ и ‘>’, так чтобы она стала 0 или 255. Затем нажимают клавишу Enter и поправка запоминается.
У меня после ребинда значение регистра 2 в приёмнике стало 198, а значение A=0 в большинстве строк.
Ну и клавиши “<” и “>”, как судя по отзывам и у многих, у меня не заработали. Надеюсь в комментариях знающие отпишутся как сделать так, чтобы всё работало.
На этом первоначальная настройка окончена.
Немного о подключении.
На стороне передатчика, в соответствии с выбранным протоколом в передатчике такой-же, соответственно, нудно выбрать и в аппаратуре.
Если в передатчике PWM или PPM, то в аппе, соответственно, PPM. Если в передатчике SBUS - то SBUS и в аппаратуре.
Приёмник.
Сначала надо определиться, что называть первым каналом. Технически - первый канал этот тот, с которого практически всегда снимают аналоговый RSSI (пин Меги D3). Так что де-факто первым каналом часто называют технический второй (пин D5). Именно с него в прошивке Байчи и снимается PPM и SBUS в зависимости от выбранного режима. Дальше идут обычные PWM выходы (Как раз регистр 28=2 и назначает, что первый PWM канал будет на фактически втором (а технически на третьем) пине. После того, с которого снимается PPM.
Немного запутано, но большинству и не надо. Просто втыкаем PPM\SBUS в пин, следующий после RSSI радуемся жизни.

Ещё коротко о FailSafe.
В рабочем режиме просто на 5 секунд зажимаем кнопку на передатчике.
Текущее положение стиков, тумблеров и крутилок будет запомнено в приёмнике как положение FS. При потере всязи приёмник установит всё точно так-же. Ну а уж что с этим делать - вам решать.
Надеюсь, что в комментариях знающие люди выскажут свои поправки и дополнят то, что я упустил.
Соберу в кучку мысли и ссылки по интересному проекту приёмыша 433.
У приёмыша нет выходов PWM, зато есть PPM, SBUS и RSSI. И предельно маленькие размеры.
Совместим приёмыш с OpenLRSng и Baychi.
Разработан в двух версиях. С SMA разъёмом и без него.
Ссылка на Гитхаб.
Версия без SMA там лежит в формате EAGLE, с SMA в формате DipTrace.
Сами платы обоих версий можно заказать тут.
Для платы понадобятся:
Самая дорогая деталь - фильтр LFCN-490
- 1250 руб. за 5 штук.
Собственно, ATMega 328p - по 77 рублей.
SMD кварц на 16 мГц - 115 рублей за 5 штучек.
Транзистор MMBT2222 - за 60 рублей аж сто штук отсыпят.
СТабилизатор напряжения SPX3819M5 - 140 рублей за десяток.
В версии без SMA другой стабилизатор - MCP1703 - за десяток 200 рублей.
За 50 рублей 100 штук цветных светодиодов.
Десяток SMA разъёмов за 100 рублей.
Рассыпуху резисторов и конденсаторов проще брать китами.
Резисторы все одного формата - 0603
Конденсаторы есть два размера - 0603 и 0805
Ну и, конечно, сама RFMка. Всего за 311 рублей с доставкой.
Приёмыш выходит, конечно, очень дорогой, но довольно симпатичный, маленький и функциональный.
По запросу HC-06 и сортировке по возрастанию цены на ебеях в первых пунктах (а значит в самых дешёвых) выпадает вот такой модуль.
Заказал ради интереса. На тот момент стоили в два раза дешевле “оригинала”.
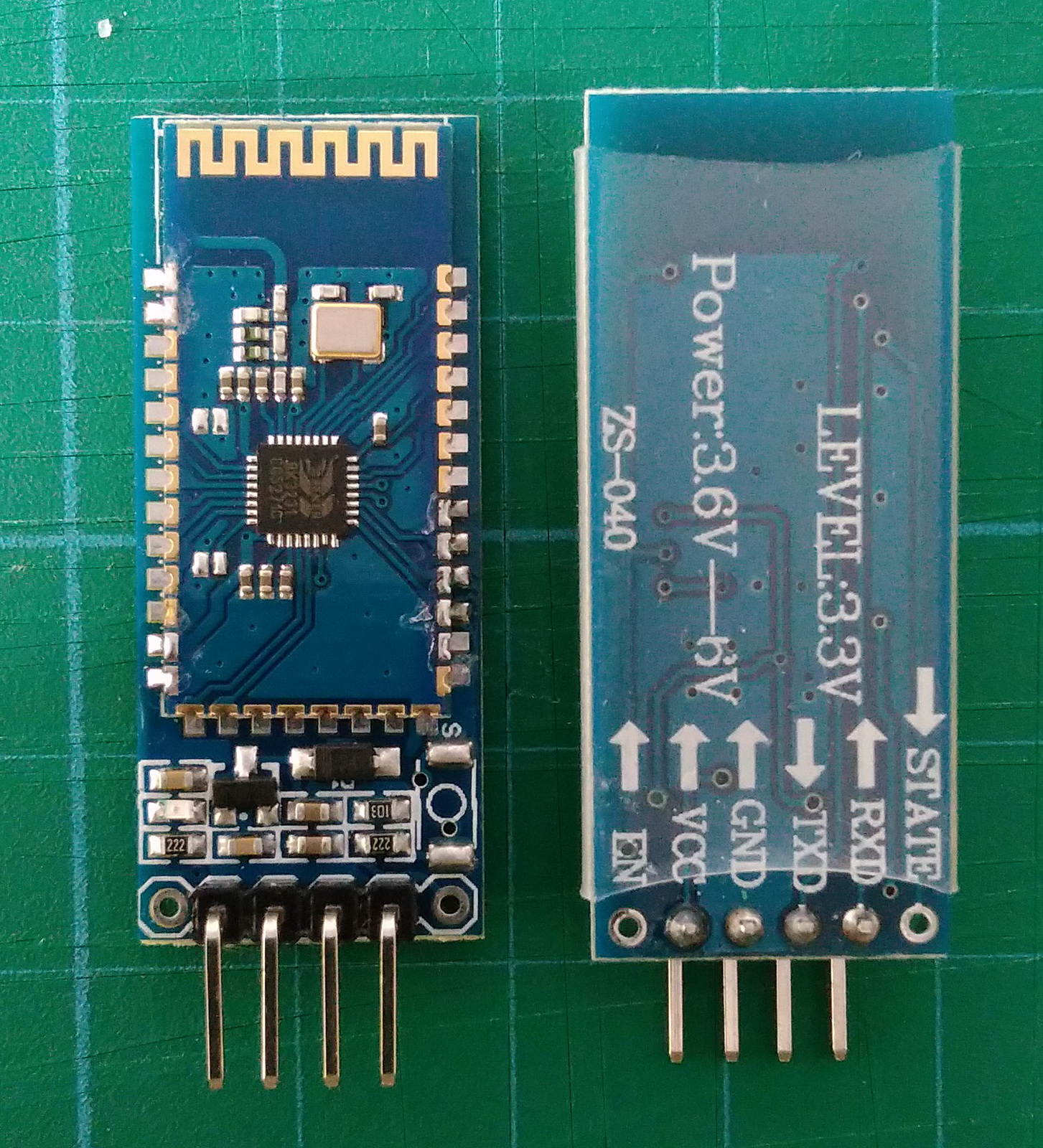
По радио модуль видится и подключается. Опознаётся как BT-04A, пин 1234.
Однако в одном терминале ни на одной скорости на AT он не отзывался.
Удалось достучаться до модуля только из монитора порта Arduino IDE, выбрав внизу “Оба NL & CR” по скорости 9600.
Вот такая прошивка на модуле.
+VERSION=+BOLUTEK Firmware V2.2, Bluetooth V2.1
А вот такой список AT команд.
Command Description
----------------------------------------------------------------
AT Check if the command terminal work normally
AT+RESET Software reboot
AT+VERSION Get firmware, bluetooth, HCI and LMP version
AT+HELP List all the commands
AT+NAME Get/Set local device name
AT+PIN Get/Set pin code for pairing
AT+BAUD Get/Set baud rate
AT+CLEAR Remove the remembered remote address
AT+LADDR Get local bluetooth address
AT+DEFAULT Restore factory default
AT+COD Get/Set local class of device
AT+IAC Get/Set inquiry access code
AT+ROLE Get/Set master or slave mode
AT+STATE Get current state
AT+UARTMODE Get/Set uart stop bits and parity
AT+ENABLEIND Enable/Disable Indication print
AT+LSP List Paired Device List
AT+RESETPDL Reset Paired Device List
AT+REMOVEPDL Remove one entry from Paired Device List
-----------------------------------------------------------------
Note: (M) = The command support master mode only, other commands
support both master and slave mode.
For more information, please visit
Copyright@2012 . All rights reserved.
Один интересный момент со сменой скоростей.
При запросе AT+BAUD в ответ приходит “BAUD4”.
Нехитрой логикой выяснилось, что это порядковый номер скорости в стандартном списке скоростей.
- 1200
- 2400
- 4800
- 9600
- 19200
- 38400
- 57600
- 115200
Соответственно, чтобы переключить скорость например на 115200 нужно отправить команду AT+BAUD8.
Очень мне нравилась прошивка для OSD именуемая MWOSD.
Сейчас контроллер NAZA и я потратил несколько дней, чтобы подружиться с minNAZAOSD.
Не вышло. Не подружился. Просто ничего не работало.
И тут как-то краем глаза заметил, что MWOSD оказывается таки поддерживает DJI NAZA.
Надо-ли говорить, что радости моей не было предела. Наконец-то можно будет настроить через адекватное GUI!!
Итак, прошился. Спутники, компас - заработало сразу.
Все дополнительные данные у меня кушала AIOP и по UART-у отдавала на саму OSDшку.
С NAZA такого кайфа не будет. Придётся паяться к ножкам АТМеги.
Туториала на какую ножку что должно идти - нет.
Стал отталкиваться от единого стандарта с KV_team.
На них нашлась вот такая картинка:

К счастью, на моей minimOSD под это дело были выведены пятачки, да уже и с делителями.

Пятачок №1 через сопротивление в 1К идёт на ножку PC3 Атмеги.
Пятачок №2 через делитель на 22К и 1К идёт на ножку PC2 Атмеги.
Пятачок №3 через сопротивление в 1К идёт на ножку PC1 Атмеги.
Пятачок №4 через делитель на 22К и 1К идёт на ножку PC0 Атмеги.
Итак, подпаялся к пятачкам.
Самое простое - вольтаж.
Бортовой и видео.
Так как делители у нас уже распаяны на самой OSDшке напряжения можно подавать напрямую на плату.
Подключаем аккумулятор, меряем напряжение, сверяемся с тем, что показывает OSD на экране.
Параметром Adjust подгоняем так, чтобы OSD показывала реальные значения.
Параметр для ходовой и видеобатареи можно выставить один и тот-же - делители на плате одинаковые.
Ставим всё это на борт и… видим на экране совершенно левые напряжения.
Не знаю почему, но при питании OSD от борта и от любого другого внешнего источника напряжения различаются кардинально.
Запитал OSD от борта, от компа подвёл TX-RX и минус. После такого извращенства удалось настроить реальные значения напряжений.
Дальше был RSSI.
У меня он берётся с Orange LRS с запаянным сглаживанием.
К слову, в GUI можно переключать тип сигнала RSSI - аналог, или PWM.
Видел, что пользователи сотен детищ ArduCAM-ма не мало страдали без этой функции.
Официальный мануал предписывает проделать простенькую процедуру.
Включить приёмник, нажать “SET” рядом с RSSI max, выключить приёмник, нажать “SET” рядом с RSSI min.
Не получилось. У меня всегда одна и та-же цифра в обоих пунктах. Или нули, или по 668.
Логику действий объяснить не могу, в разделе min ввёл ноль, в max при включенном пульте подобрал параметр, чтобы RSSI стало 100% - вышло 618. В итоге вроде-бы всё работает адекватно.
А вот дальше - фиаско. Датчик тока.
У меня стоит такой датчик.
Как я ни бился, добиться каких-либо показаний с него я не смог.
Напряжение на выходе с датчика меняется, но на экране это никак не отображается.
Возможно, я просто не разобрался с калибровкой.
Описание калибровки, мягко говоря, не самое подробное.
Starting at zero, increase “Zero adjust” to display correct Amps at motors off
Starting at max, decrease “Amps adjust” to display correct Amps at mid - high throttle setting
Так-же в коде прошивки найдены вот такие строчки:
pinMode(2, INPUT_PULLUP); // Pitch (Arduino D2 <-> Naza F2)
pinMode(3, INPUT_PULLUP); // Roll (Arduino D3 <-> Naza F1)
Без сомнения, сие предназначено для работы горизонта.
Подпаялся, подключился к NAZA - горизонт не работает.
К слову, в minNAZAOSD он у меня тоже не заработал.
Банальная серва, подключенная к F1 или F2 тоже не шевелится.
В настройках NAZA гимбал, разумеется, включен.
Ну и последнее - MWOSD умеет отображать режимы.
Есть код:
Note: PWM_OSD_SWITCH can be used in conjunction with NAZAMODECONTROL to display different layout in different modes
#define NAZAMODECONTROL // Enables NAZA mode control display using a PWM signal into OSD PWM pin.
#define NAZA_MODE_HIGH 3 // NAZA mode TX low: 0=FAIL, 1= MANU, 2=ATTI, 3=GPS ATTI
#define NAZA_MODE_MED 2 // NAZA mode TX low: 0=FAIL, 1= MANU, 2=ATTI, 3=GPS ATTI
#define NAZA_MODE_LOW 1 // NAZA mode TX low: 0=FAIL, 1= MANU, 2=ATTI, 3=GPS ATTI
По подключению в мануале есть такая строчка:
//#define NAZAMODECONTROL // Enables NAZA mode control display using a PWM signal into OSD RSSI pin.
Видимо режимы будут идти вместо RSSI.
Как их туда завести - не понятно, но, скорее всего, по аналогии с minNAZAOSD.
По мере достижения каких-либо результатов буду дополнять запись.
RC_PITCH -> EXT_ROLL
RC_ROLL -> EXT_PITCH
FC_ROLL -> RC_PITCH
FC_PITCH -> RC_ROLL
BTN -> BTN
Колин Фёрз (Colin Furze) — британский каскадёр, сантехник и изобретатель — построил в своём гараже действующий ховербайк — летающий мотоцикл, поднимаемый в воздух двумя туннельными вентиляторами и зависающий над землёй, сообщает сайт журнала Popular Mechanics.
Ховербайк — это летательный аппарат, похожий на мотоцикл. Его идея появилась в фантастических произведениях, однако там он представляет собой действительно настоящий летающий мотоцикл. На данный момент в мире ховербайки существуют только в виде прототипов. Активный интерес к разработке ховербайков проявляет армия США.
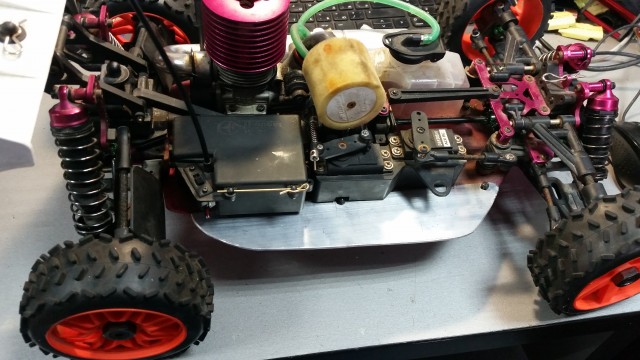
Досталась машинка с раздолбанными пластмассовыми брызговиками.
Что делать? Cтавить алюминиевые.
В Кастораме куплена полоска алюминия шириной 50 мм и толщиной 2 мм.
Из осколков старых брызговиков делаем выкройку.
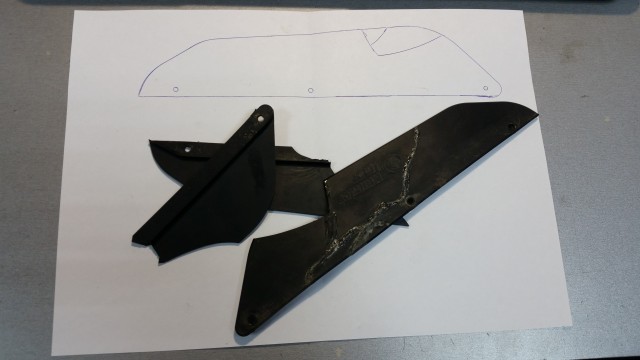
И долго и кропотливо выстригаем из алюминия бокорезами и ножовкой по металлу.
Дорабатываем напильником, сверлим дырки и вуаля!
Неубиваемые брызговики.


Достался мне Авионикс, а-ля Турнига 9Х и вместо батареек у него старенький аккумулятор.
И давно валяется заказанная на сдачу кучка разношёрстных внешних контроллеров.
И вот один из них решил попробовать внедрить в пульт.
Проверка на коленке показала отсечку вниз на 9.7, вверх не замерял, но надеюсь что всё хорошо.
Распаял в соответствии со схемой.

Схемотехника платы, видимо, рассчитана на 4S, но заказывал я именно 3S и судя по отсечке и пятку нераспаяных элементов прислали то, что нужно.
Утрамбовал в термоусадку.

И в пульт.

Теперь можно заряжать через родную дырку пульта.
Будем смотреть, пробовать…
Дневник, в первую очередь, для себя, чтобы не забыть.
Имею две платки AIOP и пришёл мне датчик напряжения и тока, коих в итернетах полно.

Модуль содержит в себе датчик тока, датчик напряжения и BEC на 5 вольт с нагрузкой до 2А
Распиновка модуля такая:

Значит так.
Для измерения напряжения соответствующий провод от датчика подключаем на пин A0.
Немного теории. Пин А0 (да и другие аналоговые входы) измеряет напряжение в диапазоне от 0 до 5 вольт.
У данного датчика максимально входное напряжение - 25 вольт. Соответственно, при подключении батареи с напряжением 25 вольт на проводе, подключающемся к А0 будет 5 вольт. Проще говоря, между батарейкой и А0 линейная зависимость. От 0 до 25 на батарейке соответствует напряжению от 0 до 5 на А0.
Для активации функции во вкладке config.h нужно раскомментировать строку #define VBAT.
Так-же я раскомментировал строчку #define OVERRIDE_V_BATPIN A0 // instead of A3 // Analog PIN 3.
Не знаю, нужно это было, или нет, надеюсь знающие люди подскажут.
Судя по комментариям к этой строчке, измерение напряжение производится на А3 и активировав эту строчку мы переносим его на А0. Секрет в том, что при любом состоянии строки напряжение измеряется и там, и там. Но на А3 у нас будет RSSI, и я решил что так хуже не будет. Собственно, хуже и не стало.
Ещё один момент. Чтобы напряжение работало корректно, AIOP нужно запитать от BEC датчика. Не просто накинуть минус, а полноценно запитать. Только в этом случае можно корректно настроить отображение напряжения.
Итак, всё подключено, исправленная прошивка прошита - подключаем к GUI.
Напряжение уже будет показывать, но, скорее всего, сильно завышенное.
Переходим в GUI на вкладку Setting и в разделе VBATSCALE выставляем параметр, при котором у нас будет отображаться реальное напряжение, предварительно замеренное на батарейке тестером. После каждой корректировки значения не забываем жамкать Write. Для профилактики этот параметр можно записать в саму прошивку. В #define VBATSCALE.
Но просто так этот параметр не изменить. При первой прошивке он пишется в EEPROM и далее, сколько-бы мы не меняли его в прошивке и не перепрошивали плату - в итоге ничего не изменится. Чтобы параметр зашился непосредственно из прошивки, нужно сначала прошить в плату EEPROM_clear. Тогда при прошивке уже самого Multiwii зашьётся и новый параметр.
У меня параметр #define VBATSCALE получился равен 31. После этого напряжение будет отображаться корректно.
В разделе “battery voltage monitoring” так-же можно поменять номинальные и критические напряжения, если у вас не трёхбаночный аккумулятор.
Следующий пункт - отображение потребляемого тока.
Провод от датчика подключается на пин A2.
Принцип тот-же. Пин измеряет напряжение от 0 до 5 вольт.
При нулевой нагрузке на датчике - напряжение тоже 0. С увеличением нагрузки увеличивается и напряжение.
Для активации измерения тока с помощью датчика нужно в прошивке раскомментировать строку #define POWERMETER_HARD
Если у вас на датчике тока нулевой нагрузке соответствует о вольт (как у меня, да и на всех подобных датчиках), то параметр #define PSENSORNULL надо сделать равным 0.
Далее самое интересное. Нужно правильно установить параметр #define PINT2mA
Официальное Вики предписывает это сделать так:
As example amploc 25A sensor has 37mV/A (from datasheet), promini arduino analog resolution is 4.9mV per unit; units from [0…1023], independant of cycle time, PLEVELDIV is set internally
#define PINT2mA 130 // used for telemtry display: one integer step on arduino analog translates to mA (example 4.9 / 37 * 1000. Larger value of PINT2mA will get you larger displayed value for power (mA and mAh)
Поясню. Первая цифра - 4,9. У нас она останется такая-же. Она описывает шаг измерения напряжения на пине А2 в милливольтах. Всего этих шагов - 1024. Получается, проходя 1024 шагов от 0 до 5 вольт один шаг будет 4,882 милливольта.
Следующую цифру разработчики предлагают нам взять из даташита на наш датчик тока. Это напряжение, на которое изменится напряжение на выходе датчика тока (А2) при изменении нагрузки на 1А. Т.е. например, при нагрузке 20А напряжение будет 2 вольта, если мы добавляем 1А, то напряжение становится например, 2,05 вольта и т.д.
Конечно-же, никакого даташита на наш датчик нам никто не предоставил.
Можно воспользоваться математикой.
Максимальный ток, на который рассчитан датчик - 90А. Теоретически, при этом он должен показывать 5 вольт.
Делим 5 на 90 и получаем шаг одного ампера - 0,05 вольт, или 50 милливольт - это и есть наша вторая цифра в расчётах.
Но цифра эта, сразу скажу, очень и очень примерная.
Можно попробовать измерить напряжение, но у меня проблема оказалась в том, что все три имеющиеся у меня амперметра показывают уж очень разные токи потребления одной и той-же, например, лампочки.
Математика такая-же. Берём лампочку, подключаем,Ю замеряем потребляемый ток. Например, у меня получился 1.75А.
При этом на проводе к пину A2 напряжение составило 0,058 вольт.
0,058\1,75 = 0,033, или 33 милливольта. Ввиду несовершенства имеющихся у меня приборов измерения цифра эта получается всегда довольно приблизительная… А в диапазоне 90 Ампер погрешность может быть довольно большая. На повермодуле стоит элемент, который наиболее вероятно и является непосредственно датчиком тока. Маркировка у него “0m50”. Гугленье ничего не даёт.
Подставляем наиболее близкое получившееся у нас число в уравнение и его результатом и будет значение #define PINT2mA.
4.9/33*1000 = 148.
Теперь ток у нас тоже будет отображаться. Хоть и достаточно примерно.
Следующий параметр - RSSI.
У меня приёмник OrangeRx Open LRS и на нём уже есть вывод RSSI.
Остаётся только активировать его в прошивке и настроить.
Чтобы заработал RSSI в прошивке нужно раскомментировать строки
#define RX_RSSI
#define RX_RSSI_PIN A3
После этого RSSI встаёт на пин А3 и, собственно, уже работает.
А вот дальше немного читерства.
Я не знаю, как калибровать RSSI через родное GUI.
На вкладке Setting есть пункт отображающий RSSI. Но калибровка там, как я понял, не доступна.
Я калибровал через OSD. Это очень легко сделать имея minimOSD с прошивкой MWOSD.
На пульте одновременно Яв и Пич на полную - OSD входит в режим настройки.
Описывать принципы навигации по меню не буду - интуитивно понятно.
Добираемся до вкладки RSSI и выбираем там SET RSSI.
Пока тикает таймер нам нужно просто выключить пульт.
После этого выбираем SAVE+EXIT.
RSSI теперь тоже откалиброван.
Бонусом - подключение и управление светодиодами.
Изначально подсветка приписана на D13.
Мы его хотим видеть на A1.
Казалось-бы, всё просто. В config.h есть строчка:
//#define OVERRIDE_LEDPIN_PINMODE pinMode (A1, OUTPUT); // use A1 instead of d13
Но не тут-то было. Скетч не компилируется. Ну и ладно.
Находим секцию и раскомментируем нужные нам пункты.
#define LED_FLASHER
#define LED_FLASHER_DDR DDRB
#define LED_FLASHER_PORT PORTB
#define LED_FLASHER_BIT PORTB4
//#define LED_FLASHER_INVERT
#define LED_FLASHER_SEQUENCE 0b00000000 // leds OFF
#define LED_FLASHER_SEQUENCE_ARMED 0b00000101 // create double flashes
#define LED_FLASHER_SEQUENCE_MAX 0b11111111 // full illumination
#define LED_FLASHER_SEQUENCE_LOW 0b00000000 // no illumination
LED_FLASHER активирует функцию. В GUI появляются пункты LEDMAX и LEDLOW, которые можно назначить на каналы и управлять ими с пульта.
Далее устанавливаются режимы. Каждая цифра после “0b” - это 0,125 секунды. Соответственно 0 - диод выключен, 1 - диод включен. Т.е. восем нулей - постоянно выключено, восемь единиц - постоянно включено. 11110000 - полсекунды горит, полсекунды нет. 00000101 - двойной проблеск и т.д.
LED_FLASHER_SEQUENCE - режим мигания/свечения при дизарменом состоянии.
LED_FLASHER_SEQUENCE_ARMED - режим мигания/свечения при арме.
LED_FLASHER_SEQUENCE_MAX и LED_FLASHER_SEQUENCE_LOW можно активировать с пульта. Можно сделать постоянно включено и постоянно выключено, или назначить свои режимы мигания.
Теперь самое интересное - мы так и не переназначили пин.
за это у нас отвечают строчки
#define LED_FLASHER_DDR DDRB
#define LED_FLASHER_PORT PORTB
#define LED_FLASHER_BIT PORTB4
Последний символ в первых двух строчках и последние два символа в третьей строчке и отвечают за адрес пина.
Чтобы узнать, какие нам нужно, надо пройти по ссылке и посмотреть название нашего пина (Analog 1).
Называется он PF1.
Буква “P” нам не нужна. Нам нужна буква F, которую мы и подставим последней в первых двух строчках.
В третьей строчке подставляем уже F1.
В итоге у нас получается следующее:
#define LED_FLASHER_DDR DDRF
#define LED_FLASHER_PORT PORTF
#define LED_FLASHER_BIT PORTF1
Пин переадресован и диод(ы) подключенные к нему уже будут мигать в соответствии с нашей программой.
Однако выходной ток у пина очень маленький и даже один диод, если он достаточно мощный, может не потянуть.
Решение простое. Организуем подсветку любым удобным нам способом, а подключаем к управляющему пину через транзистор.
Решение, аналогичное подключению управления подсветкой дисплея в Turigy 9X.
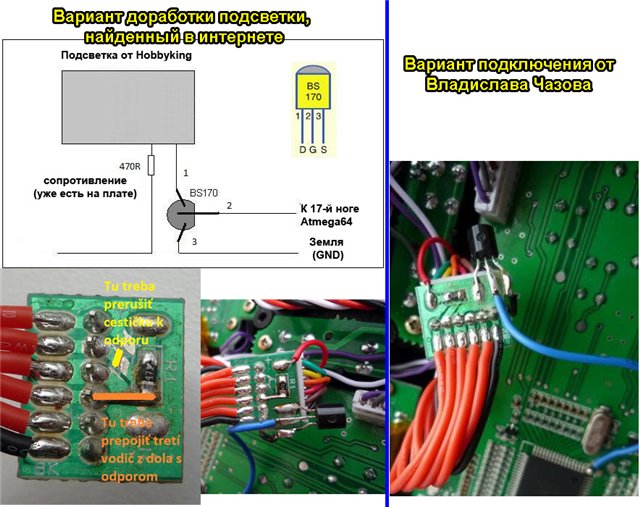
Разрываем минусовой провод питания подсветки и подпаиваем на крайние ножки транзистора.
К центральной подключаем провод от A1.
Теперь у нас транзистор будет выключателем, а щёлкать им будет программа.
Разумеется, транзистор нужно подобрать так, чтобы он мог пропустить соответсвующий ток, который требуют диоды.
Например, максимально допустимый ток для вышеозначенного транзистора BS170 - 0,5А.
Выше написал свой собственный опыт.
Если у более знающих людей есть замечания и предложения относительно вышесказанного - буду рад видеть это в комментариях.
Приобрёл пульт Avionix (один из клонов Turnigy 9X) и, разумеется, руки непомерно чесались прошить его на er9X. Только вот проблема - USBasp у меня не было и на радиорынке его, разумеется, не нашлось.
Зато у меня был Arduino Nano. И, как оказалось, им тоже можно прошить.
Процедура подпайки проводов описана для обоих ревизий неоднократно.


Далее, подключаем Arduino к компьютеру и прошиваем в него скетч ArduinoISP из образцов.

Перед тем, как подключать пульт к Arduino, в плате надо отключить программный ресет.
Делается это путём перемыкания вывода Reset и +5 через резистор в 120 Ом.

Подключаем пульт.
Соответственно, питание подключаем к питанию.
10: RESET
11: MOSI
12: MISO
13: SCK
У меня получился вот такой вот огород.

Для прошивки нам, разумеется, понадобится программка eepe.
При запуске программка проверит свои собственные обновления и обновления прошивки пульта, после чего нам надо её настроить.
Практически всё остаётся по умолчанию. В разделе “Version to download” можно выбрать какую-либо другую сборку прошивки (под телеметрийные придётся паять перемычки на процессоре).
Программатор выбираем AVRISP.
Порт - соответсвенно тот, на котором висит Arduino.
В доп. аргументы пишем следующую строчку:
-b 19200
Готово.

Делаем бекап родной прошивки и EEPROM и заливаем новую прошивку.
По окончанию пульт, как водится, говорит о ошибке EEPROM и просит нажать любую кнопку.
Пока к пульту подключена Arduino - кнопки не нажмутся! Сначала нужно отключить программатор.
Вот и всё. Имеем прошитый пульт!
Данная статья не будет интересна специалистам, или просто разбирающимся людям, но, возможно, она хоть чуть-чуть упростит решение вопроса таким-же как я новичкам, которым впервые в руки попала эта OSDшка и на которых свалилась куча иногда противоречивой информации с сайтов на разных языках.
Из всех полётных контроллеров серии “сделай сам” я решил остановиться на AIOP, как на самом, как мне кажется, продвинутом.
Ну и, разумеется, если уж на аппарате есть видео - хочется и OSD.
Самым простым и самым доступным на сегодня способом организации OSD является MinimOSD, или MavlinkOSD, что, по сути, одно и то-же. Ревизий и внешних видов этих плат - огромное количество, но форм-фактор и принципы одни. Сегодня существует ещё одна плата, построенная на том-же принципе - Micro MinimOSD. В ней уже доработано питание, выведены необходимые разъёмы на измерение напряжения бортовой сети, видеосистемы, разъём датчика тока и разъём для измерения RSSI.
Однако я-же стал “счастливым” обладателем именно Mavlink OSD. Основной проблемой этого девайса является частое сгорание микросхемы MAX7456, которая, собственно, и отвечает за наложение информации на видео.
В этой плате питание цифровой части, на которой расположен процессор ATmega, отвечающий за обработку данных с полётного контроллера и питание аналоговой части, от которой питается вышеозначенный MAX разделены.
Дело в том, что любой преобразователь питания даёт помехи на аналоговый видеосигнал. При использовании качественных преобразователей этот (д)эффект может стремится к нулю, но в некоторых случаях он может весьма заметно мешать жить. Для этого цифровая часть платы питается от самого полётного контроллера, который в свою очередь питается от BEC-а, а на аналоговую положено подавать 7-12 вольт от отдельной батареи, питающей камеру и видеопередатчик.
Однако, везде настоятельно рекомендуют объединять питание обеих частей. Теоретически, так реже сгорает MAX, а практически, у нас меньше проводов. Для объединения питания нужно запаять землю и плюс. Землю проще всего запаять зачистив два небольших пятачка на задней части платы и спать перемычку между ними.

Так-же сзади удобнее припаять проводок к +5 цифровой части и вывести его через отверстие на наружную сторону платы.
Второй конец положительного провода нужно припаять к одному из хвостов дросселя. В разных ревизиях плат этот хвост может быть с разной стороны. Проще всего отследить дорожку от “+” аналоговой части до дросселя и припаять провод к противоположному хвосту.

Чтобы случайно по забывчивости не подать на плату 12 вольт, и чтобы оставшиеся неудел иголки можно было использовать как перемычку, рекомендуется прорезать дорожку, ведущую от +12 в плату. Я просто выпаял первый попутный резистор.
Теперь можно прошивать плату.
Если у вас FTDI адаптер с шестью пинами, то помимо земли, +5 и RX-TX нужно ещё подключить проводок DTR. Тогда не нужно будет тыкать ресет каждый раз при прошивке.
Есть один ускользнувший от внимания момент, который может поставить в тупик новичка, как я.
Если полётный контроллер используется с прошивкой MegaPirateNG, то в OSD модуль нужно загружать прошивку через OSD_Config_Tool. Из единого интерфейса загружается и сама прошивка, и шрифты, и там-же производится вся настройка. Процес прошивки и настройки хорошо описан вот в этом видео.
Если-же полётным контроллером управляет MultiWii, как у меня, то для платы OSD подойдут прошивки KV_Team, или MW OSD.
Собственно, это практически одно и тоже, только MW OSD выглядит более развитой и предоставляющей больше возможностей для настройки.

Опишу пару не очевидных для меня моментов, с которыми я столкнулся.
Первым делом, несмотря на то, что в окне превьюшки у нас всё нормально, нужно загрузить шрифты.
Для этого в разделе FONT TOOLS нужно нажать сначала SELECT и выбрать один из вариантов шрифтов. После выбора шрифт сразу отобразится в превьюшке. Чтобы загрузить его в саму плату нужно там-же нажать UPLOAD. Побежит счётчик. По окончанию шрифты будут загружены.
Следующим обязательным пунктом будет тип видеосигнала. При NTSC у меня изображение не накладывалось вовсе. Выставив PAL всё стало отображаться нормально.
Так-же тут можно настроить местоположение элементов. У меня на мониторе не убралась верхняя строчка с координатами.
Для редактирования нужно нажать LAYOUT EDITOR. Под превьюшкой откроется панелька редактирования. В пункте Text выбираем нужный индикатор и навигационными кнопками двигаем элементы куда нужно.
Не забываем после каждого изменения чего-либо нажимать WRITE для загрузки изменений в саму плату OSD.
Так-же все настройки можно сохранить в файл и прочитать их оттуда кнопками SAVE\LOAD, однако настройка местоположения элементов в файле у меня не сохраняется.
Внизу есть бар SIMULATOR, в котором можно подвигать - покрутить параметры и увидеть, как они будут меняться.
Нажав Simulate on OSD мы отправляем данные в OSD, как-будто она считала их с полётного контроллера и, соответственно, все параметры отобразятся на мониторе.

Ещё одним замечательным отличием прошивок KV_Team и MW OSD является то, что полётный контроллер можно настраивать в поле непосредственно с пульта через OSD.
Я сейчас временно без аппаратуры, так что все эти настройки у меня ещё впереди. Датчик тока, напряжения и RSSI я буду подключать непосредственно к полётному контроллеру, таким образом эти параметры будут отображаться не только в OSD, но и в телеметрии.
Небольшое дополнение.
Т.к. иголки бывших 12 вольт питания аналоговой части у нас остались не у дел, я, как и планировал, использовал их как перемычку для подключения питания камеры.
А раз уж у нас так близко к OSD подходит питание от видео батареи, почему-бы нам не завести его в само OSD.
Итак, собрал делитель напряжения на двух резисторах.
Номиналы не помню, но разница около двух раз. Что-то около 100 и 50 килоом. На 100 и 50 ом сильно грелись.
В любом случае надо подобрать так, чтобы при подаче 13 вольт на сигнальном хвосте было не больше 5 вольт.
Даже если будет максимум 2 - нас это устроит.
Запаял сигнальный провод к ноге Меги и вуаля.
У нас напряжение видеосистемы.
Осталось чтолько через меню самой OSD в соответствующем разделе подобрать множитель так, чтобы отбражаемое напряжение соответствовало реальному.
Как и все, захотел сделать себе коптер.
Изначально для видеосъёмок, потому может и под зеркалку даже.
Всвязи с этим выбор пал на гексу.
Не сильно вдаваясь в тему были куплены 6 медленных моторов, дешёвые китайские регуляторы, AIOP, дешёвая шестиканальная аппа FlySky и два комплекта дешевейших китайских 12" пропеллеров.
Тут и первая ошибка.
Дешёвые пропеллеры оказались очень мягкие и выгибались при работе наверх.
Однако, я не расстроен. Дело в том, что все возможные калькуляторы говорили, что летать моя комплектация не будет, ввиду этого не стал раззоряться на карбон, чтобы можно было с наименьшими потерями переделать комплектацию.
Однако гекса полетела. И полетела хорошо и относительно долго.
Вторая ошибка - аппаратура FlySky FS-CT6B.
Однако ошибка эта весьма относительна. При небольшом бюджете я-бы и сейчас остановил свой выбор именно на этой аппаратуре.
Тут (для меня) уместен принцип - “всё, или ничего”. Если уж и брать “что-то получше”, то уже только полный фарш - с телеметрией, RSSI и FS, а так как бюджет подобных комплектов очень не скромный - для меня лично такое приобретение не очень целесообразно. Единственное, с появлением самолёта не хватает переключения настроек пульта. Только с компа, но с этим жить можно.
Основные-же мои “фейлы” касались рамы.
Рама была, разумеется, самодельная.
Нарисованная полностью от балды в Компасе, как оказалось впоследствии - точно 650-го размера.
В качестве лучей были взяты 10мм квадратные трубки из Оби. Кстати, ничего плохого при них не скажу.
А вот самая большая проблема была с “мотормаунтами”.
Точнее, проблема была в том, что их фактически не было. Моторы были прикручены к трубкам через комплектные крестики.

В результате даже не нужно было особых крашей, чтобы моторы перекосило…


Следующей проблемой этой рамы был вес.
Центральные пластины были вырезаны из 2мм алюминия. Да, страшно надёжно, но и достаточно тяжело.

Хоть тяги и хватало и с большим запасом, но ведь можно-же было легче…

Ну и последняя проблема - это шасси.
Как видно, над конструкцией я долго не думал 😃

Хлипкие ножки легко гнулись под довольно большим весом коптера даже при не очень жёсткой посадке.
Взлётный вес, кстати, был 2.5 кг. с 8000 батарейкой на 3S экшн-камерой.
Сейчас коптер полностью разобран.
Центральные пластины будут из текстолита, карбоновые пропы будут направлены вниз, трубки будут уже 14мм с такими мотормаунтами. Шасси будут из этих-же трубок, будет двухосевой подвес, 433 управление и 1.2 видео…