Activity
Разыскиваются владельцы vexilar sp200. Некоторые писали мне в лс, но таких пользователей уже нет. Хочу домодернизировать эхолот, но нужна помощь. Пишите на вайбер +380679008755. Спасибо, Иван
Разыскиваются владельцы vexilar sp200. Некоторые писали мне в лс, но таких пользователей уже нет. Хочу домодернизировать эхолот, но нужна помощь. Пишите на вайбер +380679008755. Спасибо, Иван.
Я всего лиш потребитель, а не разработчик. Вал мотора руками не провернеш. Ток потребления измерял после того как батарея вздулась. На батарее стикер 10С. Так как раньше небыло карты программирования к регу, настройки были “спортивные”. Жрал на старте 10 и падал до 3. После прогрева (15-20 сек) потребление 6.5А. Купил карту, отстроил и “обрезал” газ на апе 0-40%. Скорости хватает с головой. Старт 6А. после прогрева 3А. И обязательно охлаждение мотора и рега.
Фигню написали.
Что в вышеописанном фигня? То что амперметр показал? Или то что батарея 10С вздулась после второго заплыва на 10км, а батарея 25С отлично отработала все лето?
Есть на продажу такой комплект. Цена 80$. При макс нагрузке жрет 6,5А. Но при максималке кораблик весом 5кг. практически взлетал. А при 2,5-3А самое оно.
Батарею ему надо 25С
Фото
Кстати есть 2 сумки под такой кораблик. Если надо в ЛС
www.youtube.com/playlist?list=PLr0Qfve4sjkrvZ3zh3s…
Он же Wifi , покажите внутрености датчика )))
www.raymarine.com/view/?id=11201 хочу такой, также переделать
Я между платой и вайфаем радио модем втюхал. Сама плата вайфая на берегу, поэтому связь с планшетом всегда 100%.
Поделюсь достижением. Так как с автопилотом пока расслабился, решил запустить на 100% програмулину “Boating Navionics”. Это картплоттер. Ей нужен сигнал ЖПС и сонар. ЖПС взял с АПМ, но перевел на 9600 и через телеметрию 433мГц как радиомодем на берег. На базе с модема в блютуз и на планшет. Там обычная прога BluetoothGPS передает данные навиониксу. Сонар (эхолот) у меня Вексиларовский. Удлиннен также через телеметрию только на 115000 и на 915мГц. Навионикс работает с Вексиларом на прямую. Когда все подключено я на экране вижу свой кораблик на водоеме, а внизу экрана показания эхолота. В режиме записи трека прога создает и сохраняет карту глубины водоема. Проверял пилотный вариант на дальность – гдето 150-180 метров. Без экранов, на проводочках. Переделаю красиво сниму видео.
Как получилось с телеметрией?
Отлично. Тянуло метров 350. По сравнению с Толсоном никакой разницы в показаниях глубины. Мой проще и информативнее. Зачем платить больше 😃
Очень рекомендовано использовать отдельное питание на эхолот. Вопервых не садит тяговую батарею, во вторых помех тогда нету.
Розряжу обстановку. Ктото практиковал закрепить маленькую удочку на кораблике для ловли хищника? На ютубе полно китайских роликов. Довольно таки прикольно.
Но ведь прав человек! Для простого РЫБАКА гораздо полезней более приземленные сведения и советы.
Совет для простого рыбака: нефиг сидеть в нете. Берите удочки и на рыбалку. 😃
Что то очень похож на Харьковский пароход. Не он ли это???
Клон
Тот что на видео кораблик это реклама. Лично мне ненадо такого скутера. На робочий корабль (тот что не продается) я себе поставлю тихоходный безколекторник 700кв. Но людям нравиться как корабль летает. Они хотят чтобы раз и корабль на том берегу (метров за 300). Пофигу что забыл дужку откинуть и удочка уплыла, пофигу что при таких моторах акб расходуется раза втри быстрее. Главное чтобы быстрее чем у “Васи”. А “Вася” через месяц приходит и требует мотора быстрее чем у “Пети”. 😃
www.youtube.com/channel/UCCgI0khY9d1uDfI_2suj1ww
Более полный обзор. Это со старым эхолотом и простой апой.
Думаю такой поинтереснее будет,и характеристики получше.
navigator-shop.ru/…/besprovodnoj-eholot-vexilar-so…
то что у меня с автопилотом стоит,все в одном на планшете.
Дальность увеличивается за счет бустера на 2w.
Кстати тот же принцип соединения Lowrance Elite-4x
Так это и есть мой эхолот. Допилил я его наконец. Установил вместо WI-FI платы телеметрию 915МГц. Приемник в коробочке на берегу. С него данные идот на вынутый с платы эхолота WI-FI. А далее как обычно. Телефон коннектится с ви-фи. Ви-фи через модемы с процом. По цене одинаково что бустер 2.4, что телеметрия. Но есть одна особенность: когда пропадает связь по ви-фи, необходимо перегружать эхолот. Иначе непереконектится. А в моем варианте связь не пропадает так как телефон и ви-фи всегда рядом. Вчера проверял на воде. Корабль фарширован по полной: АПМ 2.6 с ЖПС и телеметрией 915, вышеописаный эхолот (тоже на 915) со своей батареей, водометная система с спортивным безколлекторником с водяным охлаждением мотора и регулятора. Ну и аппа Турнига 9хр. Эхолот отработал на ура. 250м связь отличная (дальше не заплывал - пруд маленький). Ничего никому не мешало, в плане частот. Самолеты сверху не падали (915 у нас неразрешено). Осталось доработать гребанный автопилот.
ПыСы Вчера видео не снимал. Есть более раннее:
Это он со старым движком. Сейчас он на 20% шустрее.
Задача:
Предлагаю объединиться. Разработать мозги катера на Arduino + wifi + gps + sonar, написать софт под android и всем этим делом рулить через wifi.
В результате получаем рабочий вариант со схемой и софтом, управление через android по wifi, автопилот + карта глубин которую в дальнейшем можно будет использовать при повторном посещении водоёма.
Очень хорошая идея. Но предлагаю использовать готовые варианты: АПМ 2.6+ЖПС. Управлять по телеметрии, а сонар там подключается штатный. Или вместо датчика высоты. Оно ДОЛЖНО работать. Необходимо немного доработать софт и катер будет ходить на нужную точку и домой. Я вижу это как новые режимы: АВТО1, АВТО2… В теории на вечер работы, но я совсем не прогер.
А что скажете за SonarPhone by Vexilar? T-box200 например.
Если серийник зашит в блютузе поплавка - мой вариант. Если в процессоре поплавка - ваш вариант.
Тут кто-то интересовался увеличением дальности приёма от Deeper, который работает на Bluetooth. Возникла такая идея - ставим возле шарика и телефона-планшета модули Bluetooth-USB, а к USB подключаем радио-модемы на 433-915 Мгц соответствующей мощности. По идее должно всё работать и без всякой переделки, как Deeper, так и телефона-планшета. Буду пробовать. Заказал модули Bluetooth-USB. Радио-модемы на 0,5W и 433Мгц есть, к ним, на всякий случай, есть модули USB, хотя и думаю, что можно будет подключить на прямую Tx-Rx и Rx-Tx. Эти выходы в модемах есть. Думаю, что тоже самое можно проделать и с WiFi для других типов эхолотов, но только модемы должны быть не на частоту 2,4G. Никаких принципиальных проблем я пока не вижу.
Радио-модемы мощностью 100mW дадут связь на 300 метров, а 0,5W до 3 км.
Вам все равно надо будет ковырять поплавок. Прога опрашивает сначала на предмет свой-чужой. Потом поплавок начинает передавать данные. Вам надо поставить модемы в разрыв поплавок - блютуз поплавка. Модемы перестроить в режим РАВ ДАТА. Скорость передачи надо измерить ком-ттл адаптером. Если будет выше 54700 дальше можете не париться. Телеметрия дико глючит на высших скоростях.
Глушит однозначно. Воюю с вексиларом уже пол года. Уже почти победил: внутри т-бокса стоит веб сервер собирающий данные с платы по уарту. Я на тх-рх поставил телеметрию 915 мгц в режиме рав-дата. Сам вай-фай вместе с приемником телеметрии в коробочке на берегу. Работает нестабильно. Постоянно отваливается связь по телеметрии. Может минут 15 работать, а может и сразу вырубится. Грешу на частоты и близость антен 915 и 2.4. Попробую на неделе телеметрию на 433.
ПыСы. Если имеется на форуме программер на джава, то можно переписать прогу без вай-фая. Чтобы получать данные напрямую с сом-порта (как в дроидпланнере).
Это надо только для предъидущей версии АПМ. Той что на 328 меге. АПМ 2,5 сам выставляет скорость обмена. Точки жпс выставляет правильно.
Вот именно. Мануалы для ровера сделаны с мануалов планера. Самолет поворачивает наклоняясь относительно горизонта (оборот вокруг фюзельжа), а наш горизонт всегда ровно. Поворачивать надо вокруг вертикальной оси, а это канал 4
У меня был карпбоат карбон 2.4 ггц. Там в пульте и в лодке вместо обычных кодера-энкодера стояли стм процы и трансиверы 2,4 ггц по спи шине. Подставить другое радио бессмысленно.
Мои вопросы адресованы людям установившим APM 2,5-2,6. В мануалах описано одно, на практике другое. Каждый раз разбирать кораблик, чтобы переключить фишку, довольно хлопотное занятие. Вот и прошу помощи у практиков. Нехотите за спасибо - озвучте цену.
В код я пока не лезу, а только изучаю его. А вот в настройках как раз и указано что CH1-ROLL, CH2-PITCH, CH3-THROTTLE, CH4-YAW.
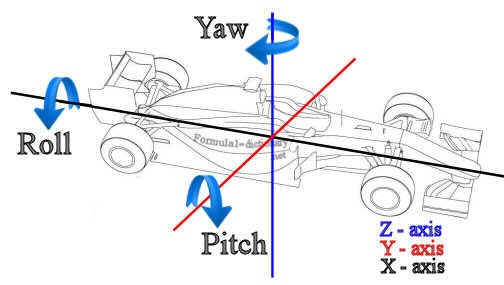
Нам нужно упрвление только вокруг оси Z, а если серва руля на первом канале то это ROLL.
Плохо откалиброванный компас это не причина ухода корабля с курса совсем. Он может плыть зигзагами или по большему радиусу но всеравно на нужную точку, а у меня корабль уходит черти куда. Хотя я по телеметрии вижу все точки и они правильные.
Кажись 2.79. Короче самую последнюю из стабильных.
Здравствуйте. Меня интересует работа АPM 2.6 + GPS. Я установил это на свой кораблик (мотор движения - канал 3, серва поворотов - канал 1). Компас откалиброван, спутники видит, точки прописывает. При попытке режима Авто или RTL, кораблик просто наматывает круги диаметром метров 4-5 и отходит от точки дом. Если я правильно прочитал коментарии в коде, то руль (YAV) надо ставить на канал 4. Проверить пока немогу. Подскажите кто вкурсе. Спасибо.
Присобачил телеметрию к эхолоту как радиоудлиннитель. Должно тянуть метров 500 как минимум. Частоту можно выбирать от250 до 920 мгц. Попробую пока на 915 или 433. У меня такие антены имеются. На выходных обкатаю.
Пысы. Друг сегодня купил Толсон 640. Тот что эхолот и картплоттер. Сравним чей точнее.
Вот непруха 😦
Глушит эхолот аппаратуру (Turnigy 9xr). Дальность метров 150, но это если управляю кораблем через телеметрию по 900 мГц каналу. А если апой то гдето на 80м. все вырубается.
Я брал напрямую у производителя (на штатовском сайте). Подключаться сразу это запустил прогу, и сразу в рабочем окне. Без заставки, без подтверждения правил и без выбора рабочий режим или демо.
Как эхолот в работе? Имею 200. Тоже модернизировал. Без усилка на антене +8дб тянет 170м. Усилок взял такойже как вы описали но неуспел поставить. Дал на вход 12в (перед этим убедился что на плате имеется стабилизатор 5в.) и он приказал долго жить. Китайский стабилизатор тупо выдал на выходе 7в. Дал задание знакомому прогеру переделать программу чтоб без всяких подтвержений сразу подключаться к эхолоту. Если заделает выложу здесь.
Пысы. По науке надо усиливать приемник. Усиление приемника в 2 раза равносильно усилению передатчика в 4 раза. Попробую втюхать в планшет выносную антену и потом отпишусь.
Очень интересует тема автопилота. Прочитав 105 страниц темы мои глаза покраснели как у кролика. Поиск по теме показал что дальше ничего нового ненаписали. Короче мои наработки: плата APM 2.6+GPS UBLOX6+Radiolinc 6ch (реально 5 каналов)+телеметрия на 915мГц. В пульт установил 6-ти кнопочную плату А.Козина (он на форуме гуру в леталках), плата нужна для выбора режимов. Все это установил на машинку. Прошивка ArduRover 2.47.
На улице ЖПС поимал спутники за 30сек… Как написано в мануале: “Режим МАНУАЛ + тумблер записи 1 раз – стирание запомненых ранее точек и установка ДОМ”. Далее режим ОБУЧЕНИЕ едем к точке 1 и тумблер записи 1 раз. Точка 1 записана. Расставил 3 точки. Выбираю режим ДОМОЙ. Машинка поехала на скорости 50% к точке ДОМ и в 3м от нее остановилась. Подкоректировал радиус путевых точек (было 10м поставил 0м). Точность стала 0,5м. В режиме АВТО машинка пронеслась по всем точкам от 1 до 3 и там замерла. Точность прохождения точек приемлемая. Используя телеметрию и Дроидпланер2 на смарте можно конкретно ехать на точку N. Хочется замутить все это без смарта, только с аппы. Мои мысли: подкорректировать код программы чтобы вместо ненужных нам режимов я этими кнопками выбирал конкретные точки маршрута. Нужные режимы: Manual, Learning, RTH (return to home). Остальные (кажись 5 штук) надо переделать под команду “DoJump N” где N-номер точки назначения. Я не программист, поиски оного пока не принесли успеха. Дальше написания рекламных баннеров и взлома игровых серверов местные Программисты не продвинулись. Может общими усилиями удастся доделать этот чертов автопилот.
Процитирую свой пост но с добавлением: это коммерческое предложение. Располагаю некоторой суммой, которой готов расплатиться за помощь. Подробности в личку или на мыло iwan_s@bigmir.net
В любом случае водомет не подходит к данным карабликам, он очень шумный и энергии тратится больше , чам для погружного винта.Водомет эфективен для скоростных.
Позволите поспорить. Пока Вы на винтах будете завозить снасть туда (пускай метров на 200) водометный катерок дважды метнется туда-обратно. На 12в 10а свинцовой батарее карпбоат карбон с двумя винтами проходит гдето 4-4.5 км, а одноводометный хакер на 14.4в 10а липо батарее не менее 12км. Время заряда свинца = 4 часа, липо = 1.5. На счет шума: оно конечно да, что шуметь ненадо. Но частенько ловить приходиться там где купаються, на скутерах гасают, да и звук издаваемый “бомбочкой” далек от тишины. Если рыба привыкла к “движению” то ей шум водомета пофигу.
Очень интересует тема автопилота. Прочитав 105 страниц темы мои глаза покраснели как у кролика. Поиск по теме показал что дальше ничего нового ненаписали. Короче мои наработки: плата APM 2.6+GPS UBLOX6+Radiolinc 6ch (реально 5 каналов)+телеметрия на 915мГц. В пульт установил 6-ти кнопочную плату А.Козина (он на форуме гуру в леталках), плата нужна для выбора режимов. Все это установил на машинку. Прошивка ArduRover 2.47.
На улице ЖПС поимал спутники за 30сек… Как написано в мануале: “Режим МАНУАЛ + тумблер записи 1 раз – стирание запомненых ранее точек и установка ДОМ”. Далее режим ОБУЧЕНИЕ едем к точке 1 и тумблер записи 1 раз. Точка 1 записана. Расставил 3 точки. Выбираю режим ДОМОЙ. Машинка поехала на скорости 50% к точке ДОМ и в 3м от нее остановилась. Подкоректировал радиус путевых точек (было 10м поставил 0м). Точность стала 0,5м. В режиме АВТО машинка пронеслась по всем точкам от 1 до 3 и там замерла. Точность прохождения точек приемлимая. Используя телеметрию и Дроидпланер2 на смарте можно конкретно ехать на точку N. Хочется замутить все это без смарта, только с аппы. Мои мысли: подкоректировать код программы чтобы вместо ненужных нам режимов я этими кнопками выбирал конкретные точки маршрута. Нужные режимы: Manual, Learning, RTH (return to home). Остальные (кажись 5 штук) надо переделать под команду “DoJump N” где N-номер точки назначения. Я не програмист, поиски оного пока не принесли успеха. Дальше написания рекламных баннеров и взлома игровых серверов месные Программисты не продвинулись. Может общими усилиями удасться доделать этот чертов автопилот.
Работает как и на Андроиде так и яблофоне. По сути это WI-FI точка доступа. Думаю что данные идут в незашифрованном виде. Просил продавца предоставить логин-пароль чтобы поковырять веб морду, отказали.
Есть на маркете прога, можете скачать и посмотреть в режиме демо.
С пересылкой получился 180$
Вопрос к програмистам скорее. Приобрел сие чудо буржуйской техники “…americommerce.com/…/27-SP200-T-BOX.aspx” не реклама. Работает на ура. Из плюсов: Sonar Frequency: 200/83KHz Duel Beam, Cone Angles: Dual Beam 20 or 40 Degree, работает на смартфоне или планшете, дальность 200м (после замены антены), неограниченное количество конечных пользователей. Из минусов: глушит дешевую аппаратуру, кушает батарею (очень желательно отдельную батарею), хреновое включение (подал питание + нажал кнопочку вкл. на 2сек., хотя решаемо), работает только со своим софтом. Вопрос следующий: как стащить данные которые он передает на телефон по http порту? Хочется наваять свою прогу “Все в одном” чтобы и корабликом управляла и ЖПС и эхолот. Порт по которому идут данные известен. Спасибо.
таблетка и датчик раскуроченный
А случаем корпуса нижнего от датчика эхолота не завалялось? А то я свой где то потерял, а есть желание вмонтировать его в днище корабля. В случае поломки датчика уже будет готовое стандартное посадочное место.
Кстати поделюсь опытом. Имел “CarpBoat Carbon”. После очередного наматывания шнура на винты (а они типа защищены), сгорела релюшка правого движка, полевики и сам движок. Движок перемотали в авиамодельном кружке за 100грн. + реле 17грн. + полевики 4шт. 32грн. (на плате было только по одному полевику на канал, а места было под два, вот и поставил 2х2). Ремонт недорогой если сам в этом смыслиш. Вмонтировал желтый датчик эхолота с вынесенной антенной (антенна на 2.4 от роутера)и повышенным питанием (4в). Уверенная зона работы эхолота 200 метров, думаю что при правильной антенне и разделенным питаловом (3.3+5) должен тянуть дальше. Проверял работу эхолота плавая по томуже маршруту своим корабликом и двумя товарищескими (Хакер с Carpboat FD500, CarpAcademy в полном заряде). Отличий по показанию глубин не обнаружил. Рыбу показали все, но разную (логично, не будет же она стоять и устраивать эхосессию). Вывод: зачем переплачивать?
Свой катерок продал. Мастерю новый. В соседней ветке описал проблему может кто что поможет. Спасибо.
Модуль такой, как описывается тут. Батарейка на плате присутствует. Но плата ведет себя как то неадекватно. Иногда может включиться за секунды, а другой раз - приходится ждать очень долго. Причём это происходит даже без отключения питания, просто при перезаливке скетча…
Выкинуть и заказать другой GPS?
Имею точно такой модуль, с точно такой проблемой. Оторвался экран антены при входе в сам приемник. Припаял приемник на плату и все отлично работает.
Меня также интересует вопрос плаванья кораблика из точки Дом точку 3 минуя точки 1 и 2. Я так понимаю необходимо указать плате автопилота (у меня АПМ 2.6 с ЖПС) что при получении сигнала на канал такойто (например 6) надо выполнить команду “Waypoint 3”. Используя плату шестикнопочного выбора режимов А.Козина, можно на канале (например 6) получать шесть фиксированных сигналов. Но где в коде эта функция не могу найти.