Activity
И это Matrice 600 с подвесом Ronin и HD-лайтбриджем
Про качество М600 тут уже вроде отписывались, подвес качественный, но это на мой взгляд не далеко “ноухау”. Вот что действительно уникальнаый продукт - это ЛБ2. Такой комбинации нет ни у кого, хоть и за эти же деньги. НО!!! Если его прекращают выпускать, какой тогда от него толк? Снова привет аналоговый линк?
Например можно глянуть официальный гитхаб бхели:
github.com/bitdump/BLHeli
Папка с блхели_с так и называется: BlHeli_S SiLabs
Папка с исходниками под атмел только для обычного BlHeli.
Для пущей уверенности можно спросить на рцгрупсах в теме про блхели_с, там зачастую отписывается сам разработчик BlHeli.
регуляторы собраны на процессоре атмега 8L
BlHeli_S не бывает на атмегах. Из известного на мегу возможно прошить обычный блхели или симонк.
Взял себе как-то на пробу Airbot Wraith32 Mini вроде таких. Заявляется 2-6S по питанию. Но при первом же включении на 6S - бабах, огонь и дым. Оказалось бахнул входной танталовый конденсатор. Вырвал остатки, припаял нормальный электролит - и все заработало. Вот вам и заявленые характеристики.
Ну а на видео этом все с виду вполне четко, без слишком плохих пидов, вибраций и длительных нагрузок. Однако ни с того ни с сего - чих и дымок. У меня такое бывало, когда давным давно начинал делать свою собственную прошивку для бесколлекторного регулятора. Вроде работать работает, но в один прекрасный момент что-то перекашивало в программе и ключи заклинивало включенными, естественно с дымом из мотора.
Как по мне, если винты не вкручивались в обмотку моторов, то сразу стоит попробовать другие регули. Возможно даже более старые, но обкатанные народом.
не знаю нифига - 60А - 6S
Так как раз все и логично - если не знаю, беру с запасом. И регулятор и батарею.
А вообще я сам лично заметил, что BlHeli32 не очень хорошо работает с высокими напряжениями и/или высокооборотными моторами. Для себя сделал вывод, что хуже, чем это было у BlHeli_S. Но прогресс он же неумолим, этож же обзовут лохом, если взять старые провереные регули, вместо малообкатаных, но новых и трендовых.
Вот кстати человек столкнулся с такой же проблемой на этих регулях и моторах, только у него 2700 кв
А в вашем случае произошло то же самое, что и на видео или просто дали на холостую максимум газа и через 10-20 секунд работы на максимуме пошел дымок?
Думается мне на видео дело в регулях, а не в моторах.
поэтому я и перешел на DJI
Наверное открою большую тайну, но таких как вы подавляющее большинство 😃
мавика трясет на ветру как бешенного а видео стабильное
Тогда это скорее вопрос на форум какой нибудь цифровой обработки изображений, а не в тему о виброразвязке. Видеоизображение на дронах DJI искуственно стабилизируется цифровой обработкой. Тряси перетряси, алгоритм все по максимуму отстабилизирует. У самоделкиных же такого чита в арсенале нет, приходится изголяться с вибро- и тряскоразвязками.
стоял на таких полетник от г-на Сапешко.
Это чтобы от DJI подозрения отвести? 😃 Интересно получается - если коптер, то только DJI, а если разбивается - значит виноват отечественный разработчик 😁 Ох уж эти маркетологи 😃
главное чтобы “блестело”
В конце концов любой продукт должен блестеть. Иначе здесь быстро найдутся “умники”, скажущие, что у китайцев блестит лучше.
6 слоев со слепыми переходными
6 слоев конечно хорошо с точки зрения компактности и качества разводки, но имеет смысл делать например для большого количества мелких регулей, где сама плата будет минимальных размеров и можно будет вместить много таких в один стандартный заказ. А для себя или для попробовать выйдет очень дорого и/или долго. Все же для тестов и разработки лучше обходиться минимумом слоев.
Даже не сайте тмотора самый мощный регулятор этой серии рассчитан на 80А:
store-en.tmotor.com/category.php?id=59
Где вы нашли на 180А не совсем понятно.
Появилась необходимость сделать кастомный мощный регулятор на знакомой прошивке. Выбор как всегда в последнее время пал на BlHeli_S. Вот что вышло:
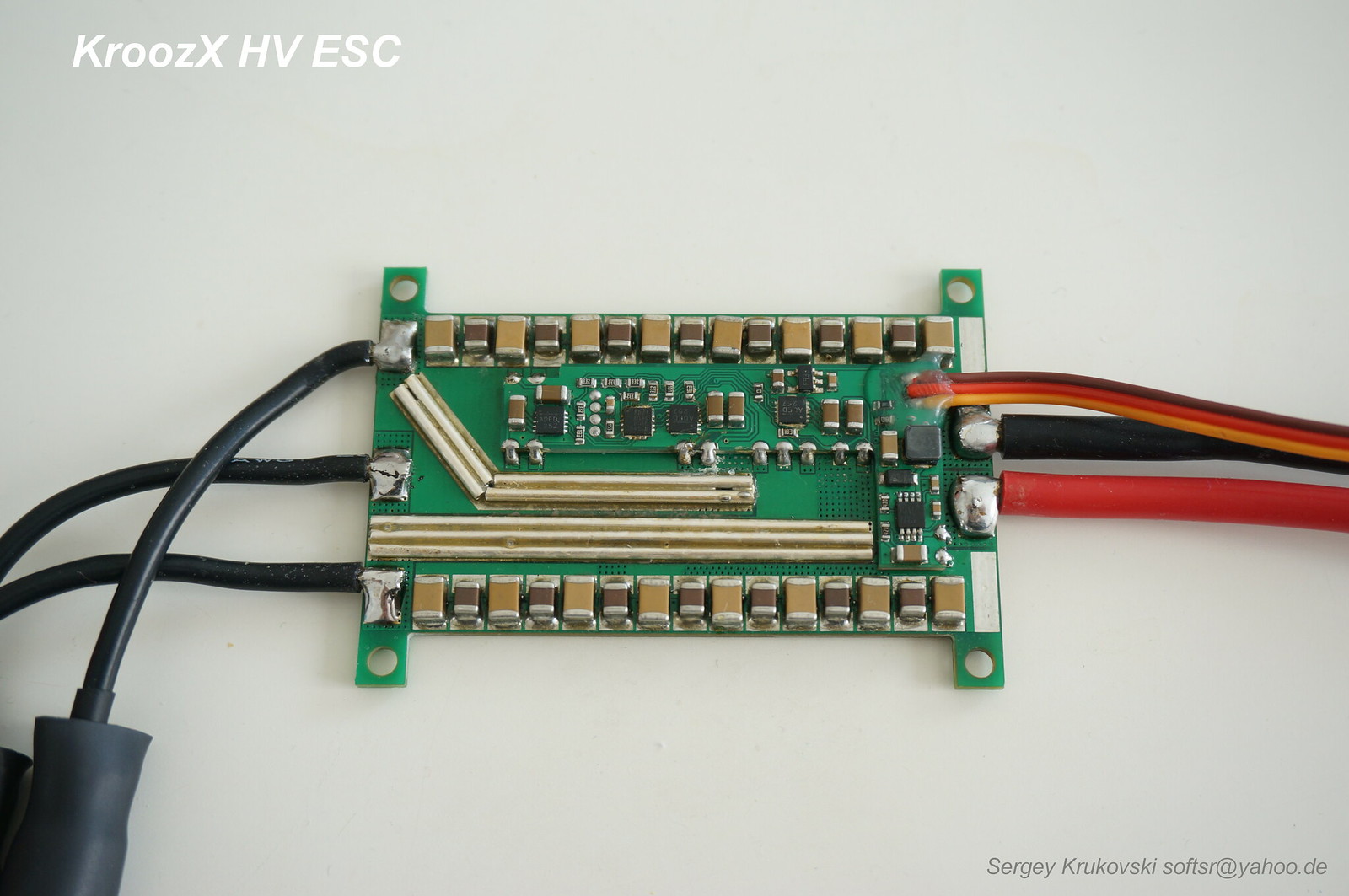
48МГц BB2 чип, MP1907 драйверы, 100V импульсный преобразователь питания, счетверенные TDSON мосфеты.
Ну и простенький тест:
Должен сказать, что с аутраннерами BlHeli_S работает получше, чем этим мощным инраннером. Нужно расширять диапазон настроек, что в общем то и позволяет кастомная прошивка.
Здается мне, мощных коптерных регулей не делают из соображений безопасности. Слишком уж у них большие перепады газа при работе, что может вызывать опасные токовые перегрузки. Хотя и это скорее дело реализации.
что-то не заметил тормозов в работе Go 4
Человек выше писал про игры и фпс, а не про Go 4. То, что DJI не могут (либо не хотят) сделать свою Go 4 под андроид без тормозов и глюков даже на мощных девайсах вообще не вина андроида.
к примеру 1 и та же игра на айфоне и каком нибудь сяоми(который в 2 раза мощнее по хар-кам) будет идти если не одинаково, то на сяоми хуже
Это только до тех пор, пока на айфоне не “состарится” батарея 😃 А происходит это с завидной для конкурентов периодичностью 😃
Я бы может и купил бы убийцу мавика от сяоми, но пока нет ничего, отметились MiДроном в нише квадриков и пошли дальше клепать носки
Это же бизнес. Фишка в том, что особо ловить в сегменте потребительских дронов уже нечего. Спроса на всех уже не хватит, особенно по приемлемым для производителя ценам. Оттого и такой выбор продуктов.
А как быть с абсолютной точностью позиционирования камеры? Без этого точность GPS совершенно бесполезна и все равно все закончится раскладкой и замером маркеров на земле.
рекорды все побиты
Прекращайте уже пустословить, если не знаете, о чем речь.
Насчет "тяжелых"затворов есть драйвера, они легко справляются с этим
Есть определенные физические законы, которые просто драйверами не обходятся. Бесконечно быстро зарядить емкость (затвора) можно только в теории. На практике все упирается в схемотехнику и разводку. С миниатюризацией и усложнением разводки (как в китайских регулях) возрастают задержки в управлении ключами даже с драйверами. Всему есть разумный предел, в том числе и миниатюризации. Тут все упирается в желание возможности - если есть желание и возможность использовать только дешевые китайские регули то да, разницы в эффективности можно и не увидеть.
Даже на литлби обнаружил драйвера ,сильно был удивлен,там полевики стоят меньше клопа,возможно за счет этого они еле греются при 15 А на 3 эс.
А у меня как раз совершенно противоположный опыт с LittleBee, как я уже писал у меня такой регуль с самой покупки сильно греется на обычных рабочих токах.
Если вы об этом, то на свои регули я естественно также ставлю драйвера.
5 часов полета на электричестве
С водородным баллоном на борту?
фиаско
Фиаско, это когда человек не построивший ни одного долголета с умным видом рекламирует в теме про долголеты китайские регули, причем определенного производителя.
В чем проблема то сделать долголет на киатйрегулях
Так вот и я об этом. Никто так и не повторил моего старого рекорда с той же самой комплектухой, кроме полетника и регулей. И это даже с современными легкими моторами. Отсюда лично я еще раз, кроме всех тестов, делаю вполне однозначный вывод - для долголета не все регули одинаково полезны.
А вот тут не совсем понятно как быть , чем меньше сопротивление открытого канал тем меньше нагрев, меньше расход , с учетом этого желательно использовать даже для легкого долголета мощные регули ( более высокотоковые имеют меньшее сопротивление при прочих равных) , благо сейчас полно 30 А в весе 10 гр,даже есть 45 А по 3.5 гр. Частота управления ключами в современных регулях десятки кГц , так что каждое обращение к более высокоомному ключу несет потери, наверно лучше все таки более низкоомные каналы…
А вы например представляете, почему вообще греются процессоры в компьютерах? И почему тактовая частота так сильно на это влияет? Тот же самый эффект имеется и для регуляторов. Кроме того омические потери на открытом канале при долголетных токах минимальны, но более низкоомные ключи имеют заметно больший заряд затвора, что влияет на время открытия и потери во время этого процесса. Так что более высокоомные ключи в случае долголетов в определенном диапазоне сопротивлений каналов имеют преимущество над низкоомными.
Вся миниатюризация в китайских регулях также не на пользу эффективности. В угоду компактности используются менее емкие и более мелкие (с большим еср) входные и буферные конденсаторы, также увеличивает потери при открытии и закрытии ключей.
Все это я учитывал при разработке своих регулей, отчего в том числе аппарат на их основе до сих пор остается с непобитым китайскими регулями рекордом, пусть и висения.
Ок, тоесть ни одного фото, а лучше видео, в доказательство того, что хоть кто-то сделал реальный долголет на тех китайских регулях пока так и не появилось. Что в общем-то и ожидалось. Обычный перевод темы. Особенно если учесть, что советует эти регули человек, не построивший ни одного реального долголета. Все эти биты, дшоты и прочее в случае долголета не имеют никакого значения.
разницы ну нет
Вы эмпиричеки (на глаз) к такому выводу пришли или делали реальные замеры? Как я уже упоминал, на стенде разницу бывает очень сложно заметить.
сопротивление открытого канала
При долголетных токах сопротивление канала полевиков не играет практически никакой роли в результирующей эффективности.
Вполне вероятно, что все современные китайские регули с минимальными отличиями в схематике, одинаковыми драйверами и одинаковой прошивкой практически идентичны по эффективности. Но я пока так и не увидел ни одного серьезного долголета, построенного на нынешних китайских регулях, приблизившегося к моему рекорду уже трехлетней давности. Даже с теми же самыми моторами, пропеллерами, аккумуляторами и легкими рамами. Прошу принять это просто как факт, если этому нет опровержения, ничего личного.
Понимаю, что одному деятелю здесь очень хочется перевести тему на его любимые китайские поделки, но кто-нить на самом деле вообще сделал хоть один реальный долголет на подобных регулях? Если да, то по возможности приложите фото аппарата с описанием параметров.
По старой схематике, которую использовал для рекорда на 2 часа, но с современной комплектухой, запилил новый 4 в 1 регулятор на старом добром SimonK:

Вес этих четырех регулей получился 9-10 грамм. За счет современных комплектующих немного подросла эффективность.
Регули разрабатывались с прицелом на максимальную эффективность и минимальные потери. А применять можно как и любые другие BLHeli_S регули.
Added BLHeli_S type “V”
Это кстати прошивка под KroozX регуляторы. Попросил ребят добавить для полноценности настройки.
А где написано что переменный ток должен обязательно менять полярность?
Тут дело не в этом, а в том, что местные горе специалисты не могут отличить переменный ток от постоянного. Но при этом с огромным опломбом пытаются кого-то учить.
В проводах бесколлекторников идет переменка. Интересно, что ток течет тот же самый как в цепи батареи, так и в цепи мотора. Поэтому в идеале для долголета все же длинные провода к регулятору, поскольку тогда экономится вес на одном лишнем длинном проводе к мотору. Ну а магнитные помехи длинной цепи подключения к батарее можно минимизировать например коаксиальным проводом. Ну и естественно желательно подпаять в этом случае большую емкость на вход регуля.
Есть рецепт маленького долголета
Рецепт принципиально ничем не отличается от любого другого долголета - сделать все как можно легче, взять батарейку побольше. При этом просто меняется размер рамы под конкретные пропеллеры.
1.7.2 от 1.6 для сп рф3 сильно отличается?
Это скорее знает автор. Хотя значения и “цена деления” пидов менялась, насколько я помню, возможно правда только для самолетного кода. В любом случае если аппарат исправен, то с дефолтными пидами должен хоть как-то, но лететь. А точная настройка делается уже в полете.
Вы когда установите батарею, все может стать иначе. Инерция аппарата изменится и пиды уже могуть стать впору.
Сложно сказать. Особенно если было падение, как вы говорите. Я бы еще проконтролировал балансировку моторов.
Возможно больше можно было бы сказать, если бы вы сняли небольшое видео того, как это выглядит, желательно со стационарной камерой (всмысле без тряски в руках).
Изменений после замены нет.
Есть некоторое подозрение, что могла уйти калибровка. Но все же, например в гоночной ветке, вопрос о неконтролируемой раскрутке моторов при запуске квадрика на столе уже успел стать мемом. Так что можно попробовать сделать калибровку, но сам факт завала в данном случае может и не указывать на проблему.
Есть ли ноги/ретракты у вашего квада? Или вы пробуете запускать его со всеми лучами, касающимися пола?
Само собой на долголет все должно быть как можно легче. Даже тех же 4в1 уже несметное множество у китайцев. Но подавляющее большинство из них созданы изначально для гонщиков, с каким-то минимальным набором периферийных устройств и возможностей. При сборке же всего в кучу, соединении проводами (особенно силовыми, соединении внешнего датчика тока) может набежать неплохо веса. И это даже не касаясь эффективности как таковой, обусловленной схематикой конкретного регуля.
Если нужно полетать/погонять - да, можно особо не выбирать, брать первые попавшиеся. Да и то не всегда они одинаково работают.
А вот если долголет - нужно уже смотреть и выбирать. Например есть у меня литтлбии - почему-то весьма сильно греются, даже на небольших нагрузках. Такое ощущение, что у них греется понижающий стабилизатор. В любом случае нагрев это лишняя потеря энергии, которая может быть незаметна на обычных аппаратах, но очень заметна на долголетах. Для своих долголетов я разрабатывал собственные регули, в которых точно без дела ничего не грелось.
Плюс хоть и сделал уже, но руки пока так и не добрались сделать сравнительный тест SimonK и BLHeli_S регулей с одинаковой схематикой. SimonK сегодня звучит весьма архаично, но сдается мне там тоже может быть разница в эффективности.
Нет смысла в сборке коптера без мультиметра.
Это было бы верно в случае, если бы в инструкции к этому полетнику не было бы написано 5V там то и там то. То, что эти 5В могут плавно превращаться, например, в +6В, которые приемник еще держит, а вот GPS уже нет - не вина сборщика. И это жесть, даже человек с опытом легко мог попасть на сгоревший GPS в данном случае.
как реализуется дублирование I2C на UART порту
Если речь не о softUART/I2C, то внутри F* микроконтроллеров есть возможность переключать ресурсы на пинах. То-есть программной настройкой подключать один и тот же пин контроллера либо к внутреннему UART, либо к I2C модулю.
На Ф4 программно уже нельзя? Видел платы где стоит внешний инвертор, написано, что им тоже можно управлять программно. Это как?
В самом Ф4 микроконтроллере на портах не стоят инверторы, поэтому ставят внешние. Которые управляются либо пайкой перемычки, либо с отдельного свободного пина контроллера. Во втором случае инвертором можно управлять программно, например из конфигуратора (в частности через cli соответсвующими коммандами, вроде ***_inversion = ON/OFF).
В таком случае стоит попробовать поменять два любых мотора вместе с регулятором местами. Если заваливаться будет на тот же мотор уже в другую сторону то нужно смотреть мотор и регулятор. Если же продолжит заваливаться на ту же сторону, тогда скорее всего нужно смотреть в сторону полетника.
можно по логу понять, контроллер так отрабатывает или мотор с регулем халтурят
Вы аппарат только на полу пытались тестировать? Не взлетали еще?
Буржуйский сайт по 3Д-печати
Так люди там увлекаются как раз именно печатью, а не коптерами для рекордов. Напечатали коптер - и довольны. А как и сколько он будет работать им уже мало интересно. Взять хотябы печатные клоны мавика, единственная польза от которых в том, что они похожи на мавик. У нас же здесь все-таки задача немного иная.
revo nano clon = 6
…
Как то вы все с очень большим запасом по весу берете, как мне кажется.
А что мешает сделать выкосы в режиме Х, но не от центра в разные стороны, а вперед передние, и задние назад.
Как я это вижу, у креста будет равномернее распределена нагрузка на моторы, чем у Х, потому как боковые лучи проходят через ЦТ. Плюс вдоль лучей выкосы делать технологически немного проще, чем при Х с направлением выкоса вперед.
у данных типов винтов большое боковое сопротивление
Сопротивление диска в любом случае больше.
Нагружена рама, к которой крепится батарея, в точках крепления луча - луч выступает рычагом.
Если никого не смущает, что моторы будут немного смещены по высоте, то можно взять два монолитных луча и наложить их друг на друга крестом через небольшую квадратную пластину для диагональной прочности. Думаю как раз в этом случае можно будет иметь 6 грамм вместо 60ти. Вроде тут уже кто-то так даже делал.
А кстати, тестировал ли кто-нить, что эффективнее в полете на скорости - рама Х или рама крест? Сдается мне, что если у креста сделать выкос переднего и заднего мотора вперед, чтобы они давали тягу, а боковые в рабочем режиме полета становились бы горизонтально, то лобовое сопротивление всей конструкции было бы ниже, чем у полностью наклоненных 4-х пропеллеров рамы Х. Плюс горизонтально расположенные боковые пропеллеры давали бы на скорости некоторую дополнительную “подъемную силу”, вроде крыльев.