Activity
Редко удается посещать моделку. Из последнего:

Думаю заказать 3д-печать внешнего корпуса, получится куда точнее, заодно сразу будет черная😁


Может вставить в мешок рамку из перегородок с отверстиями, чтобы уменьшить перетекания воды? По-моему система из насоса и поршня уж очень тормозная, насосу еще и поршень толкать/тянуть…
Еще бы посоветовал купите готовый корпус, их сейчас хватает, даже ваш Пермит есть.
Поддерживаю. Выклеивать корпус впервые - сложно, чего только болван стоит.
В принципе, можно подключить. На 4 пиновом разъеме кроме питания, есть вход датчика оборотов и выход шим, которой регулируются обороты двигателя кулера. Если сделать преобразователь шим-> модельный pdm, то можно управлять регулятором. На двигатель наверное придется поставить датчик оборотов от кулера, т.к. неизвестно, будет ли материнка управлять шимом без обратной связи, + неизвестно как она отреагирует на обороты модельного мотора. Питание 12 вольт от бп компа, но бп нужен мощный. Имхо, слишком много заморочек, если вы конечно не собираетесь ставить рекорды разгона😁
Как к полипропиленовому шприцу надежно присоединить штуцер? Хочу сделать возможность срочного погружения - установить в верхней части бц штуцер, а далее через клапан вывести вне wtc. Т.е. чтобы погружение происходило как к реальных лодках. После срочного погружения клапан будет программно блокироваться, и открыть его снова можно будет только после всплытия.
P.s.: материал штуцера не важен, лишь было герметичное и надежное соединение. Пока на ум приходит только сварка пластик-пластик
А у меня опять фиговые фотографии😌
Из-за того что кончик корпуса был сделан не очень, выточил такой вот дюралевый хвостик.

Конец корпуса сейчас обрезан не ровно, точно я его обрежу когда будут установлены мотор и дейдвуд с валом, тогда можно будет ровно выставиться и вклеить хвост по оси.
Поэтому начал делать внутреннюю раму - впереди еще горизонтальные платы для серв и вообще куча всякого.😃

Бц установлена сверху, так как заполненная, она все равно легче этого акка.


Осталось довернуть лопасти, очистить от лишнего припоя и отбалансировать 😃
Сегодня наконец попал в моделку. Начал делать винт, еще нужно сделать лепестки и пропилы в ступице для “отвертки”. Прошу прощения за качество фото:)

Частота нужна какая-нибудь из трех. За уоки-токи спасибо.
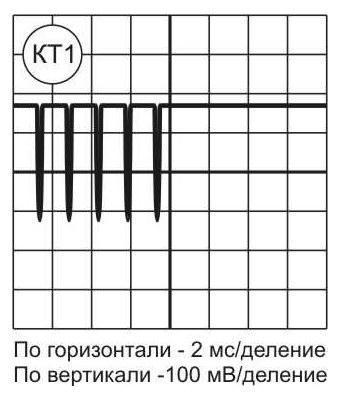
Так какие должны быть характеристики осциллографа, чтобы можно было настраивать такие схемы? Выше написали, что dso138 не подходит.
Хотя по моему наиболее “сложный” сигнал из статьи про приемник он должен показать:
Да, под водой, поэтому на такие частоты. А что можете посоветовать из более-менее доступных китайских, покупать нормальный, “большой” нет возможности, да и пользоваться им буду не часто. С рук у нас их продают по таким ценам, что можно купить новый.
Добрый день. Хочу попробовать сделать передатчик и приемник на 27/35/40мгц для передачи аудио сигнала с гидрофона - хочу установить его на модель подводной лодки. Как я понимаю, устройство такого комплекта мало отличается от того, что используется для р/у, поэтому в последствии хочу собрать свою аппаратуру. Подскажите, хватит ли возможностей dso138 для наладки:
- полоса пропускания до 200 кГц
- до 1 млн замеров в секунду
- чувствительность 10 мВ/дел - 5 В/дел с точностью 5%
- разрешение АЦП 12 бит
- максимальное напряжение на входе 20 В
- развертка 10 мкс/дел - 500 сек/дел
Отсутствие сигнала можно зафиксировать, но вот если все в воде, то может спасти разве что буек с сахарным пускателем. Или выталкивать эту воду газом из баллончика.
Или лодку на веревочке запускать:)
Может тогда пару баллончиков в корпуса выпускать, из прочного, если течь снизу, может воду выдавить или хотя бы приостановить затопление, а осушение легкого корпуса так вообще очень прибавит плавучести, ненадолго, но может хватит сил вырваться.
Если модель утонула в пруду можно попробовать искать ее с помощью гидрофона.
vrtp.ru/index.php?act=categories&CODE=article&arti… - вот схема
я собирал гидрофон, основной усилитель делал на tda2822 (ищите схему усилителя для наушников) чувствительность повышается с напряжением питания
то есть если лодка запуталась в водорослях, то нужно активно работать сервами и газом, чтобы как можно сильнее шуметь
сам честно говоря такой способ пока не пробовал, но чувствительность гидрофона вполне позволяет такое
Можно кстати сделать левый и правый канал, так должно быть еще проще
То есть эта штука превращает длительность импульса с приемника в лог. 0/1 на 12 или 13 ногах микрухи, плюс еще с подстройкой порога?
Тм2 вместо 4013 подойдет?
Если при этом потребляемый контроллером ток не превысит 200ма, то по идее можно. В вашем случае остается запас 120ма на остальные порты. Если камень большой, с несколькими входами под питание, то лучше не экспериментировать, может и не сгорит, но возможны глюки.
Зы. Это для атмелов
Склеил такой вот кирпичик…

В любом случае это пока тестовый вариант
Спасибо всем за советы! Это будет кураре, с упрощениями конечно, но основные отношения и плечи сохранены. На ней буду разучивать юношеский комплекс, базовые фигуры, типа горизонтальной восьмерки, бочки, петли, иммельмана и проч.
Пластик оказался ломкий, нашел фанеру, толстоватую правда, но сухую и легкую. Накладки сделал так, что они будет приклеиваться к верхнему и нижнему стрингерам. Пенал для лонжерона сделаю из подложки, лонжерон у меня квадратный. Нервюр 15 штук, через 50 мм каждая, возможно и слишком часто, но я думаю что в таком варианте не будет опасности их помять при наклейке обшивки, материал все же тонковатый.

Насаженные на лонж накладки клеятся к нервюрам.
зы. на фоне чуть-чуть видна новоиспеченная циркулярка 😃
Спасибо, темы про большие пенолеты уже выучил практически 😃 Я еще в мае думал такое построить, рассказал тренеру, но он посчитал такую технологию хлипковатой. Надо было ему фотографии показывать, тогда я чего-то не додумался. Правда то копии, или полукопии (не мне судить), а мне нужна пилотажка, разучивать комплекс. Нервюры я уже повырезал, сделаю циркулярку и распущу рейки касторамовские, а то они широковаты. Ерундовое крыло судя по всему получится, но зато эксперимент проведу 😃
Как подлодка?
Моделка пока закрыта, станков да и материала дома у меня нет:( Жду сентября. Сейчас собираю материалы, нашел трубочки латунные для дейдвуда, недавно сделал открытие, что в дозаторе зажигалки есть офигительно маленькое резиновое колечко, как раз подойдет для изоляции тяг. Нарисовал профиль лопасти для винта. Готовлюсь к трудовым будням 😃
Согласен с выше отписавшимися. Кроме того что не все мелкие модели могут висеть, мелкую модель сдувает даже слабый ветерок, так что рулить и одновременно пытаться поймать модель становится сложно. Хотя вообще с мелкими 3д-шками такие “посадки” я видел.
А вообще вертикальную посадку проще организовать при сильном ветре - выставил носом против ветра и снижаешься, вертикально, и сразу на брюшко 😁
Всем добрый день. Хочу построить электропилотажку, размах 1.5м, вес до 2 кг.
И к сожалению, из материалов у меня пока есть только подложка 3мм и сращенные рейки из касторамы.
Хватит ли прочности такому крылу с нервюрами из подложки и сращенными стрингерами? Нервюры придется проставить почаще. Обшивка тоже из подложки. Лонжерон 11*11 мм, тоже сращенный , длиной 750 мм, чтобы входил на половину в каждую консоль.
На нервюры придется делать пластиковые накладки чтобы лонжерон их не промял, какой-то прозрачный пластик, толщина 0.8 мм, но не оргстекло. Думаю, его хватит.
Фюз планируется по такой-же технологии, моторама и посадочные под сервы из фанеры.
Собственно, спрашиваю потому, что хочу узнать, имеет ли смысл делать самолет из таких материалов сейчас, или дождаться сентября и делать все по науке, проблема только в том, что укомплектовать модель и полетать получится опять же, лишь в сентябре.
У вас получается две БЦ имеют объем всего 120 мЛ, этого вам хватит, если WTC вы посадите на самое дно корпуса и длинна WTC будет не более 290 мм,
поместить в нем 2 поршневых БЦ с сервами, мотором и батареей, будет тяжело, если вообще возможно!
Если делать WTC по максимуму, длинной 500 мм, то вам нужно будет увеличить объем БЦ до 450мЛ или грузить лодку на 10 мм ниже ватерлинии.
Хм, я недопонял почему объем бц нужен именно такой 😃. Сейчас длина втц 405 мм. Объем вытесняемой воды получается 1822 мл. Значит для нейтральной плавучести нужен вес 1822г, минус вес воды, принимаемой бц. На самом деле меньше, ведь еще есть вес винта, рулей и проч. Основным балластом будет аккумулятор. Еще сервы, мотор, мотор бц, приемник и прочее.
Конечно, не факт что веса всего этого полезного балласта будет достаточно, чтобы лодка погрузилась. Если балласта не хватит, то я думаю добрать недостающий вес аккумуляторами, например, можно сделать отдельный дополнительный аккумулятор для электроники, от которого также будет питаться бц. Т.е. с него будет браться питание если основной аккум сел. Банки АА NiMh должны поместиться. Можно догрузить и свинцом, но свинцом я хочу только добиться нейтральной плавучести, чтобы вес мертвого груза был по минимуму.
Сделал заглушки. Проверял втц сегодня в ванной - не течет:)

Спасибо за подсказку, но я думал отлить и сами плоскости из смолы, моя стеклоткань достаточно плотная, выклеить из нее хороший руль наверное не получится. Кстати а что за смола на фото? Моя в застывшем виде желтовато-прозрачная. Или это какой-то наполнитель?
На лире рули все же не совсем одинаковые, нижний руль идет вплоть до конца плоскости. Впрочем можно сделать вертикальные одинаковыми, а на нижнем отпилить лишний кусок.

Строю Лиру, масштаб 1:100, лодка получается небольшая, всего 80 см в длину.

Будет двухкорпусная, прочный корпус из пвх трубы 75мм. Прозрачной трубы, к сожалению не нашел.
Собрал две бц:


Управление бц будет организовано с помощью микроконтроллера - на штоковую шестерню редуктора устанавливается диск с прорезями - оптический инкрементальный энкодер, и с помощью фотодатчика определяется число оборотов шестерни, а значит и расстояние продвижения поршня. Сам мотор бц тоже управляется микроконтроллером. Мк подключен к приемнику, откуда и считывает требуемую позицию поршня. Шток сделан такой длины, что при полностью сброшенной бц его конец находится на одном уровне с дальней стенкой редуктора бц. На стенке будет расположен еще один фотодатчик, с помощью которого определяется нулевое положение поршня, т.е. при включении лодки поршень автоматически загоняется в ноль для того чтобы в дальнейшем обе бц работали синхронно.
Места в прочном корпусе очень мало, плюс хочу добиться максимальной скорости и продолжительности плавания, поэтому делаю такую вот электронную систему. Мотор будет бк, думаю даже сделать обдув мотора и регуля маленьким вентилятором от флоппика (идею с охлаждением мне подсказал Elisco).
Также будет система фейлсейфа. Источников будет 3 - потеря сигнала с передатчика, протечка, разряд аккумулятора. Под заглушкой втц будет соответственно три светодиода, чтобы можно было понять почему лодка всплыла.
В дальнейшем планирую сделать авто-дифферент на gy521, чтобы после отпускания ручки глубины погрузившаяся лодка держала горизонт сама.
Сейчас думаю из чего сделать рули. Склоняюсь к отливке из эпоксидки, парные рули тогда получатся полностью одинаковые, но не хрупковато ли будет? Может можно чем-нибудь укрепить эпоксидку?
Спасибо. Уже видел некоторые его видео. Правда он использует реле, а в комментариях ему предлагают мосфеты, а он отказывается:). Но у него хорошие видео про изготовление винтов и вообще про механику, например прижимаемые к корпусу рули.
Я тут понаписал столько всего, а пытался сделать только фейлсейф, но он пока не закончен. Немного поменял принцип, программа упростилась. Пока занимался только строительством - выклеил корпус и выточил заглушки прочного корпуса. Жду резинки на уплотнение заглушек. Почти собрал бц, осталось сделать стойки под двигатели и собрать все это дело. Читаю книгу по программированию авр’ок, вроде понятно, посмотрим что получится на деле:)
Не могу найти клей, чтобы хорошо схватывал пластик шприца. ПВХ хорошо клеит Момент Гель и модельный Uhu Plast, но за шприц не берется. Кто знает, что его берет?
Вроде пластик шприца можно только сварить. Не знаю что вам нужно приклеить, но я для крепления использовал болтики, там где нужно просто прикрепить, без герметичности.
зы:Скажите пожалуйста, где вы брали резиновые кольца для уплотнения заглушек прочного корпуса? Я уже и в автомагазинах спрашивал и на радиорынке искал, везде максимум 30мм диаметром…
Если использовать поршневую бц, то да, при заполнении воздух внутри прочного корпуса немного сжимается, но основную работу по выдавливанию воды делает все же мотор. О балластных цистернах очень хорошо написано здесь.
Сегодня написал для тини программу фэйлсэйфа. Писал на ассемблере, откомпилировалось без ошибок, но проверять в железе буду завтра, куплю макетку и распаяю на ней инвертор. Ради проверки мк написал прогу, выставляющую серву в определенное положение. Попробовал с разными положениями, приходилось правда для этого каждый раз перешивать мк. Заработало! Рад, впервые запрограммировал “голый” мк. 😃
Завтра отпишу о результатах испытаний.😃
О, про мултивии я совсем забыл. Спасибо!
Какой канал управления предполагаете использовать:
МГц ?вопрос у меня к себе только один - как продувать балласт при всплытии?
Я использую старую аппаратуру на 35мгц, на 2 метра точно пробивает, проверял.
В поршневой цистерне поршень просто выдавливает воду и всё. Самая простая система, не нужно никакого сжатого воздуха, можно погружаться и всплывать насколько хватает аккумулятора.
Добрый день.
Строю модель подводной лодки, и вот столкнулся с некоторыми проблемами по части электроники. Прошу помочь мне с алгоритмом действий, код я постараюсь написать сам.
Что я хочу сделать(в порядке необходимости):
-
Контроллер балластных цистерн. В моей лодке их приходится делать две. Цистерны поршневые, т.е. шестерня с резьбой внутри двигает насаженный на конец шпинделя поршень(я взял шприц на 50 мл).Привод от коллекторного моторчика, через редуктор. Обычно для контроля таких цистерн применяют выключатели на два крайних положения, т.е. либо цистерна пустая, лодка на поверхности, либо полная, и лодка погружена. Я же хочу сделать управление цистерной пропорциональным. На главную шестерню повесить диск - оптический инкрементальный энкодер, и считать обороты. Чтобы не возникала разность положений поршней во время работы, при старте проверять положение шпинделя фотопрерывателем, и если надо - утапливать шпиндель в ноль.
Из контроллеров у меня есть тини13 и ардуино уно(в лодку я собираюсь поставить нано). Управление бц собираюсь делать на дуне, в ней есть как раз таки два внешних прерывания, через них можно считывать обороты с энкодеров.
Алгоритм работы я вижу такой - при старте проверяем нулевое положение поршней, таймером захватываем импульсы с приемника, сверяем с текущим положением поршней, и при необходимости крутим мотор туда или сюда, пока не будет соответствия положение-сигнал. При этом еще нужно как-то притормаживать перед требуемым положением, либо постепенно скважность шима снижать, либо управлять вообще без шима, выключая мотор за несколько оборотов до нужного положения. По-моему такой алгоритм рабочий, прошу критиковать:). -
Фэйлсэйф. Ну здесь просто. Транзистором инвертировать сигнал с приёмника, подавать на вход тини. На этом входе сделать прерывание по низкому уровню, в прерывании включать выходную ножку, т.е. как бы копировать сигнал. При этом в прерывании обнулять значение счетчика, а в основном цикле проверять его значение, и если он достигнет определенного значения из-за пропадания прерываний и, значит, сигнала, то подавать на выход сигнал, соответствующий пустым цистернам. По-моему тоже должно работать:).
-
Реверс серво задних рулей глубины.
Смотрел я разные видео про модели пл, и заметил что у всех рули глубины работают враздрай, и при срочном погружении на ходу, когда начинает заполняться балласт, а рули отклоняются на погружение, из-за раздрая задние рули поднимают корму и винт вылетает из воды, и никакого срочного погружения не получается:).
У моей аппаратуры есть канал для шасси, управляемый с аппаратуры кнопкой. Я решил его применить для включения реверса. На выходе приемника сигнал либо 1.1ms, либо 1.7ms. Как инверснуть серво мне понятно, но вот чтобы измерить сигнал нужен таймер, а в тини он уже будет занят фэйлсэйфом.😦 Я могу заменить тини на 2313, или мегу8, но может есть какая-нибудь дешевая аналоговая схема, с помощью которой можно будет более длинный сигнал представить как лог. 1?
4.Авто-контроль дифферента.
Чтобы можно было совершать длинные заплывы под водой, в особенности если лодку плохо видно. То есть, если лодка погрузилась на нужную глубину и теперь руль глубины стоит в нейтрали, то лодка сама исправляет дифферент, если он появляется, чтобы оставаться примерно на заданной глубине. Для этого уже купил gy-521. Тут алгоритм планируется такой: считываем длительность сигнала и сравниваем с предыдущим значением, если оно совпадает(и соответствует нейтрали), то переключаемся на “авто-пилот”. Эту задачу я собираюсь возложить на дуню, управлять она будет только передними рулями. Для этого судя по всему понадобится пид-регулятор, и его реализация вызывает у меня больше всего вопросов.
Собственно, я прошу указать на недочеты в моих идеях по реализации всех этих систем. Последний пункт в принципе не обязателен, хотя и очень хочется:). Может что подскажете по части реализации ПИДа?
Имхо, лучше всего по соотношению цена/требуемые параметры будет сделать самому, на тиньке и логик-левел мосфетах.
У Вас одна бц? Сложно было отдифферентовать?
Hobbyking eco six ac/dc
Да эта тоже умеет. Вам нужен режим charge, а не баланс, какой может быть баланс одной банки?😉
пысы: только осторожнее, на баланс порте входы близко расположены, не коротните их случайно, лучше сначала один крокодил подсоединить, заклеить его металлическую часть изолентой, а только потом второй подключать.
Зарядить вам надо одну банку (1S).
Моя зарядка не умеет заряжать меньше 2ух банок
Значит придется идти к кому-нибудь заряжать, или одалживать подходящий зарядник…
imax b6, например, умеет заряжать одну банку.
Да я понял что через балансир. Вопрос в том, как мне подключить только одну банку, если разъем на 4 банки.
Они там примерно вот так соединяются. Думаю, как подключить только одну банку сами догадаетесь?😉
зы: я бы взял два pls штырька, а к ним бы прицепился крокодилами.

Как настоящая😒. А можно немного фотографий внутренности?
Водонепроницаемый цилиндр
А где такой пластик для заглушки брали?
Вряд ли такие дальность и глубина устроят народ в этой теме.
А на интересующих расстояниях вряд ли получится радиоканал.
Подводная радиосвязь то возможна(на длинных волнах, судя по всему), выходят же как-то из под воды на связь реальные подлодки, вот только придется искать/разрабатывать схему приемопередатчика, настраивать её… Имхо, для rov выбор очевиден - это кабель. Он и надежнее, и проще, и в крайнем случае за него можно вытащить аппарат.
пысы: свою аппаратуру я собираюсь использовать в модели пл, не во рве:)
А дальность какая была?
Тестировали в бассейне для моделей (в подвале здания). Отходил метров на 6, на сколько комната позволяла, связь была. Про подвал я сказал потому что мало ли, может сигнал от стен как-то отражался… Но перед запуском модели еще на открытом пространстве проверять буду, в фонтане.😃
Слышал, что радио сигнал проходит на не большую глубину, но, чтобы на 10 метром, для меня открытие.
На сколько мне известно, радиосигнал проходит в воду на половину длины волны. Лично проверял работу аппаратуры на 40мгц под водой, правда глубина была около 80см, но все прекрасно работало.
Есть проблемы с герметизацией, не нашёл датчика глубины, затопление пока измеряю тестером.
Здравствуйте! Я тоже искал датчик глубины (но мне на модель пл надо - небольшой), wenom86 подсказал - вот такой датчик, только он дороговат и там их сразу 5 штук…
Видимо хотел спросить почему без WTC, сразу разместили аппаратуру в легком корпусе лодки.
Да, я как раз это и имел в виду.