Activity
Дрон-курьер. Груз не сбрасывает, летит в одну сторону. Дальность - десятки километров. Доставляет флэшку с данными. Масса 250г.
Планер - Alula-TREK от Dream Flight
Модификация - Eric Benoit
FC - Ardupilot
Бюджет - 300-400 USD
еще одно “How To” по тестированию и сравнению стабилизаторов

Выглядит симпатично, а что за DATA порт на коробке? Это телеметрия и управление “бортом” ?
Пока это служебный порт, используется для собственных нужд отладки.
Прошли ли испытания? Может есть видео?
Технические были. Съемки будем делать уже после возвращения. После ракет корпус будет немного обгоревшим.
С вертолетом эффективнее выходит?
Просто надо было что-то по-солиднее запитать 😃
Ракеты за рубеж не поедут.
В живую можно будет увидеть на NAB show, Лас Вегас, 18-21 апреля.



Уезжает, а дальше что?
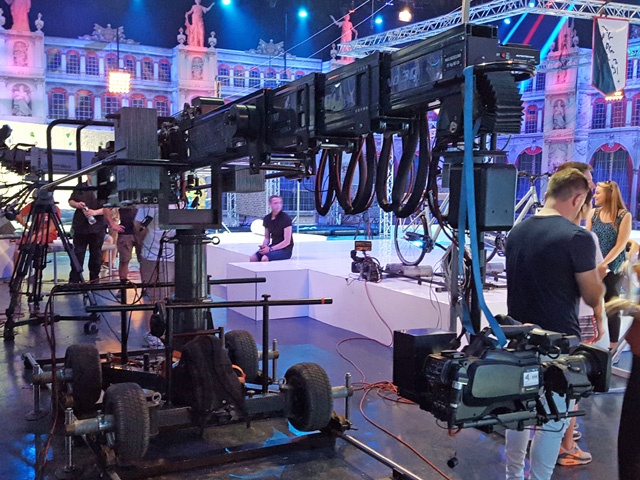
Это беспилотный летательный аппарат. Люди сидят на блок-посту в 500 метрах от этого наблюдательного пункта. Потребность в таких быстроустанавливаемых дозорных вышках возникла год назад у одной страны.
Судя по рукояткам для переноски боевой расчет минимум три человека. А если для поля - плюс ещё два с 5-киловатным генератором, плюс бензовоз.
Один человек на джипе все это подвозит, выгружает, запускает, уезжает. Вдвоем и девочки справятся.
Лет 5 продавать будите такое количество. А может и больше.
Да, это сложно угадать. Но если пограничная служба закажет , скажем, 100 штук с предоплатой, то цена единицы снижается в несколько раз.
это ваш продукт? к нему есть даташит или хотябы ттх или инструкция по применению?
Продукт наш. Есть только рабочие материалы, не для распространения. После испытаний и демонстраций станет ясно, нужны ли будут какие-либо доработки. Так же после демонстраций будет приниматься решение о производстве. Будет ли это производство под заказ или сразу выпустить штук 1000. Потому пока нет ни цены ни даташитов. БП уже есть, теперь готовим дрон.
Красочная демонстрация на полигоне примерно через месяц-два. Используем максимальную мощность обычной сети питания - 3,5кВт. Автоматическая и ручная настройка напряжения и тока с контролем на борту. Соответствует нормам по безопасности напряжений и излучений.

похоже на земле высокочастотный высоковольтный генератор, на борту компактный высокочастотный тороидальный трансформатор диодный мост и конденсатор
за это говорят габариты наземной станции и габариты блока питания на коптере
факт отсутствия бортового стабилизатора напряжения указывает на то что сам аппарат сделан нечувствительным к большой разнице в питающих напряжениях скажем заточен под 16-25 вольт
Есть нюансы, но вы верно угадали суть. Украинцы так же идут в этом направлении со своей “Вежа”.
Месяц назад составил список аналогичных проектов. Много кто обещает, но в прайс-листах еще ни у кого нет. Надо либо писать запросы, либо ждать.
И так:
Hoverfly Technologies, Inc. (США)
Маленький дрон для массового производства с простым управлением. По проводу передается 120В напряжение. Декларируемая высота 45м, продемонстрированная 20м. В продаже еще нет.
Elistair (Франция)
Блок проводного питания для дронов. Мощность не указана. Длиа провода до 100м. Продемонстрировано на высоте 20м. Получили финансирование, объявлены вакансии для 5 технарей.
Sky Sapience (Израиль),
Стартовали в 2012, декларируют до 100 метров, но на демонстрациях живая высота не более 30 (не обращая внимания на компьютерную графику и кадры с иных платформ):
Israel Aerospace Industries (Израиль)
ETOP - Electric Tethered Observation Platform, примерно 2011 год. Декларируемая высота - до 100м, на демонстрации – 20м.
HOPE Technik , (Сингапур)
Три модели дронов с опциональным питанием по проводу. Декларируемая высота 60м, на демонстрации 20м.
The Drone Aviation Corp. (США),
Занимаются исключительно проводным питанием дрона. Два офиса в США, девять или более сотрудников. Декларируют высоту 80м, но более 10 не продемонстрировано:
VersaTOL, (США)
Аппарат VENOM. Демонстрация вызывает вопросы, достигнутые показали не ясны.
CyPhy (США),
Обещают создать проводное питание для массового дрона. Сотрудничают с Моторолла. Демонстраций пока нет.
Air Group (Россия),
Аппарат Air-Q8. Предлагают производство под заказ, цены не указаны. Декларируют длину провода 50м, на демонстрации поднимается на метров 5:
Аппарат “Вежа” (Украина). Декларируют длину провода 100м, на демонстрации высота метров 40:
Up&Above, Space Science and Technology Institute (Литва),
Аппарат VMR-1. Декларируют высоту до 100м. На фотографии метров 10. Иных демонстраций нет. На данный момент описание аппарата с их сайта удалено.
НЕЛК (Россия),
Анонсировано проводное питание 50м для аппарата «НЕЛК-В12» , но пока нет ни в каталоге, ни демонстраций, хотя работы начаты в 2013.
ZALA (Россия),
В 2014 году анонсировано проводное питание для их аппарата ZALA 421-22, пока демонстраций нет.
ООО «Авиа Инженеринг» (Россия),
На выставке ИНТЕРПОЛИТЕХ-2014 показывали аппарат АПВК-6 с проводным питанием. Демонстраций работы нет. Ищут инвестора на сумму не менее 10 млн евро. Презентация: aviae.com/img/podj/Presentation_rus_eng.ppt
Kansas State University, (США)
Аппарат WolverineIII, 2010 год, высота метров 10.
Atlanta Instrumentation and Measurement, LLC , (США),
Разрабатывают проводные системы связи для дронов и подают топливо на вертолет по трубочке. Декларируют высоту 300м, на демонстрации не более 100м. (давление в трубке более 30 кг/см2).
Электрический вертолет с питанием по проводу продемонстрирован в 1979 году:
Наш результат. Сентябрь 2015. Испытанная длина провода - 400м. Поднят на высоту более 300 метров. Аппарат предназначен для принципиальной демонстрации. Коммерческая версия для заказчика будет с проводом покороче.
Список составлен в октябре 2015, Алексей Зайцевский.
Интересно как Вы решили вопрос с колебаниями по вертикали?.( 0,3 метра ??? !!! )
Много восклицательных знаков для столь простого вопроса 😃 На кране в студии была проблема с браком картинки при разгоне и торможении, а так же на шатающемся помосте. Проблема вертикальных колебаний возникает, когда камеру ставят на джип. Решается таким же рычагом, но в горизонтальной плоскости. Пружина уровновешивает массу, а активный дампер работает также. Пока такой узел был не нужен, но как закажут - сделаем.
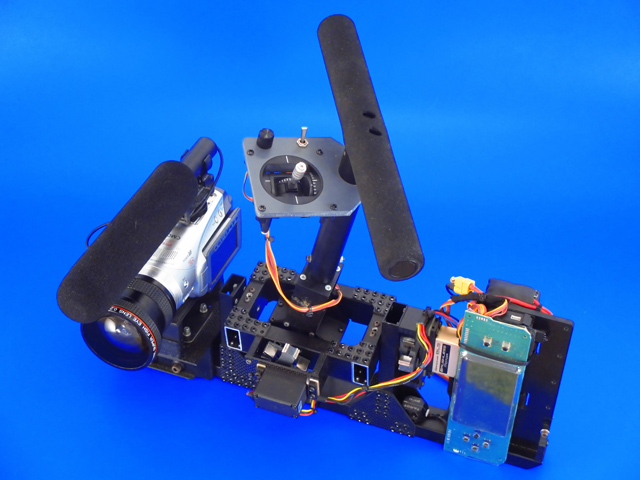
Мой проект уже вышел за рамки хобби, тем не менее поделюсь информацией о пятиосевом варианте.
Тут гасятся как угловые, так и линейные колебания с частотой от 1 Гц и выше, амплитуда до 0,3м.
еще раз популярно о сервоприводах Force Servo:


Кто как борется с тряской подвеса?
частоты выибраций от 1 Гц и выше, амплитуды до 0,3м (под крупные камеры)
Видео раз:
суть:
Первый летательный электрический аппарат на проводе я встретил лет 20 назад. Это был кордовый самолет, дистанция метров 10.
Месяц назад достигли высоты >300м.
еще один тест “Подвеса камеры на бесколлекторных моторах прямого привода”.
DJI Inspire1, Zenmuse X3
Точность относительно цели – 3 градуса
Точность относительно дрона – 0,3 градуса
Декларируемая точность – 0,03 градуса
Уровень ВЧ колебаний – 0,02 градуса
Размер одного пикселя собственной камеры в режиме 4К:
86градусов / 3840пикселов = 0,022градуса.
(86 градусов - угол обзора камеры по центру кадра)
То есть, радиус размытия из-за шума примерно равен одному пикселю при широкоугольном объективе.
Если перевести точность позиционирования в пикселы, то получим до 130 пикселов дрейфования.
А ещё остаётся вопрос с 360 градусным вращением по Яву, если я ничего не упустил, но всёравно технология крута! Когда уже можно будет применять на коптерах серийный продукт, скажем для Nex ?
О серии пока речи не идет. Сони выпускает NEX камеры количеством более миллиона шт. Этот сегмент что бы закрывать нужны серьезные инвестиции на массовый продукт. Одних только свадебных операторов по миру до 10 миллионов (разного уровня). Пока финансирование ограничено - трачу время на тяжелые подвесы и малые количества.
По панораме вращение не ограничено, если проводов не накручивать.
Не стоить лукавить - уберите у Ронина велосипедный руль и подставку, а точнее прибавьте эти нужные акцессуары к своему гимбалу, и размеры сравняются.
Моему гимбалу специальная табуретка не требуется.
Это Ронин нельзя просто поставить на стол, нужен помощник с подставкой.
И ту и другую долго не потаскаешь, как ни как 10 кг и 9 кг (масса с одинаковой кино-камерой).
Велосипедный руль - это не прорывная технология, а дело вкуса.
С переносом веса на изи-риг без велосипедного руля еще удобнее разворачиваться и даже бегать.


Примерно такая же, как у трамвая, тролейбуса, электромобиля, с их двигателем и редуктором.
Алексей, очень круто ! но какая продолжительность жизни сервомеханизмов в течении которого они способны выдавать такие результаты тестов?
Еще один тест второго прототипа Поинтера.
По сравнению с тестом, где нагрузка была меньше, увеличилась амплитуда циклических раскачиваний и снизились дрожания более высокой частоты. Что вполне логично.
Камера и линза - 4,6 кг
противовес (батарея, монитор, железо) - 2,9 кг
стабилизатор (с креплениями, без батареи) - 1,4 кг
всего 8,9 кг.

сравнение размера

Китайцы уже для нас платы сделали и магнит в комплекте www.aliexpress.com/item/…/32237823728.html
может кому интересно. Так установлен энкодер в DJI RONIN. Крутящий момент 5кг*см.

Попали ко мне еще два подвеса с прямыми приводами, протестировал:
Правила моих тестов:
- Метод раскачивания подвеса должен быть виден и доступен для повторения другими пользователями.
- Критический уровень колебаний камеры должен быть четко виден.
- Обязательно обозначить угловой размер объектов на видео или снимать луну.
- Предметом демонстрации должен быть критический режим работы стабилизатора, а не только красивая картинка.
Функция стабилизатора - стабилизировать. Основная оценка в измеряемой величине - коэффициент передаваемых (устраняемых, а иногда и добавляемых) колебаний.
Нет надобности 10 минут смотреть на плавные полеты через фишай линзу, если можно за 30 секунд наглядно продемонстрировать эффективность с теле-фото линзой и повторяемой процедурой.
Зашел ко мне в гости оператор с подвесом, снял тест. Куплено было за 1500 долларов, несколько месяцев назад.
Настроек я не касался, наверняка можно че-то улучшить. Да и уровень механики соответсвует стереотипным ожиданиям от китайцев.
Но, наверняка, значимая часть свадебных операторов именно такой техникой и снимает.
Судите сами. 70мм линза на MARK-II, угол в 10 градусов обозначен.
Предвосхищая фразу “да никто так не снимает”.
Можно рабочую смену провести на съемках и просмотрев весь материал обнаружить брак съемки в лучшем из дублей. А можно провести концентрированный тест техники заранее.
Развитие проекта.
POINTER XV Стабилизированная платформа для поворота камеры
Версия 2015-02:
Максимальная нагрузка - 15 кг
Максимальная компенсируемая скорость - 1000 град/сек
Средний коэффициент трансляции угловых колебаний - 0.002 (1/500)
Амплитуда сглаживаемых горизонтальных колебаний - до 0.3 м*
(над последним пунктом сейчас еще продолжаются работы)

Прототипы стабилизированных узлов вращения с внутренним карданным шарниром
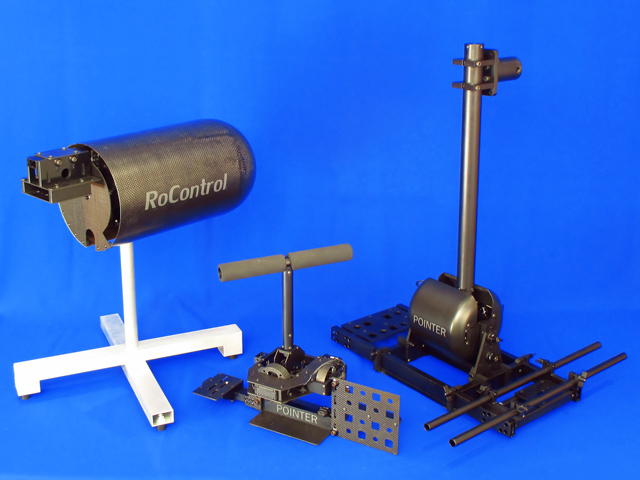
Бесколлекторная микросерва на 5 кг нагрузки.

При горизонтальных смещениях плавает горизонт 0:56. Или мне показалось?
Смещение на размер луны - это грубо пол градуса. Щас померял линейкой при тесте по Roll (панорама). Размер луны 22мм (без ореола), смещение края за один период - 4 мм, период ускоряется примерно от 2 до 0,5 сек, амплитуда до 120градусов. Это примерно = 0,1 градуса.
Важный вывод: та ось, на которой действует противовес дает стабильность в несколько раз выше (лучше по горизонтали, чем по вертикали).
Начинаю работу над следующей версией подвеса и позже уже буду работать над ее демонстрацией.
тут опубликована суть теста с луной
А это короткий сест и баловство с подвесом Pointer-1:
вот помню что-то тут говорили на тему 50х зума.
вот вчера попробовал на “скорую руку” 😃
Оптический стабилизатор отключаем и лазер ставим 😃 Что бы отличать в чем суть прикола и чья заслуга.
50х зум - это от какой начальной величины? 1200мм эквивалент - это примерно две величины луны в кадре по вертикали или чуть более двух градусов по диагонали (для проверки).
Предлагаю посоревноваться так: fotokomok.ru/proveryaem-tochnost-raboty-mexaniches…
Алексей, здравствуйте!
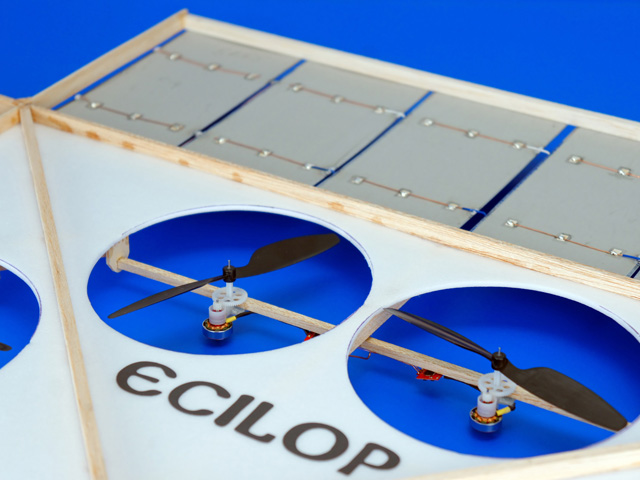
Планируете ли развивать идею коптера на солнечной энергии?
Если да, где можно следить за новостями?
Если нет, почему?
Спасибо.
Не планирую.
Есть два момента:
- что бы мало потреблять (долго летать) надо снижать нагрузку на несущие площади - а значит делать аппарат плохоуправляемым и ненадежным.
- Средняя энергия солнца сравнима со стредней энергией ветра для одинаковых площадей (т.е. безопасного и надежного мультикоптера не получается).
Но можно развивать это направление как вид спорта.
ecilop.com/data/ecilop-solar.phtml
Из доступных для всех это самый удачный способ. В нем просто переводить линейные перемещения в угловые величины для сравнения и оценки. Да и указки лазерные не проблема. С увиличением дальности возврастает точность расчетов. Удобно и просто. И эти указки многие применяют для балансировок в хобби.
Для меня это способ, а для пользователей - нет. Если подвес держат в руках, то его линейные колебания дают большее отклонение луча, чем угловые. Луна - условно бесконечно далекий объект и потому дрожание рук не имеет значения.
Алексей, очень симпатизирую вашим работам. Много у Вас интересного. Но у разработчика должны быть точные приборы и точные цифры (ТТХ), иначе дальше, чем хобби это не будет восприниматься. И сложно судить что, как, где лучше.
Китайцы часто на своих изделиях не указывают многие важные параметры …и понятно почему они так поступают.
Если величина отклонения меньше одного пикселя изображения, то такой подвес уже является идеальным для данной камеры. У GoPro при разрешении HD1920 один пиксель примерно равен 4 угловым минутам (примерно 1/8 величины луны).
Я использую лазеры - более точный способ.
Но есть актуальный запрос на более объективный критерий сравнения подвесов среди пользователей.
Это ведь еще и тест на криворукость при сборке. Если механика кривая и оси подклинивает - это можно подправить. Но сперва нужно обратить внимание на то, что твой подвес работает хуже, чем у других.
Угловое положение Луны на небесном своде трудно синхронизировать с положением нулевой оптической оси подвеса. Конечно, можно провести все расчеты с учетом перемещения, но это не для слабонервных, Да и на подвесах нет углового лимба … как итог все замеры будут приблезительными
Во время теста за одну секунду регистрируется сперва смещение в одну строну, потом в другую. А луна никуда не колеблется за 1 секунду. Луна должна быть в кадре и совсем не обязательно в центре (точности направления в несколько градусов достаточно что бы угловая величина пикселей не отличалась).
К обсуждению
__________________________________________
Последовательность действий для сравнительного тестирования стабилизаторов видеокамеры.
Желательно проводить тест в полнолуние и с использованием телеобъектива. Применение оптического или цифрового стабилизатора изображения не допускается.
- Направьте камеру на луну с максимальным приближением.
- Наклоните подвес на 45 градусов вперед, потом на 45 градусов назад и повторите это пять раз за 5 секунд.
- Поверните подвес на 45 градусов влево, потом на 45 градусов вправо и повторите это пять раз за 5 секунд.
- Это был тест работы стабилизатора при быстром раскачивании.
- Медленно (не быстрее, чем за 5 секунд) наклоните подвес вперед и назад, потом медленно поверните в обе стороны.
- Это был тест на точность работы контроллера по определению положения.
- Включите запись на 1 секунду. Оставьте подвес не подвижным на 10 минут. Снова включите запись на 1 секунду. Кроме Луны или вместо Луны в кадре должен быть любой неподвижный объект на большом расстоянии.
- Это был тест на медленный дрейф.
- Отключите программные ограничения на скорость вращения. Дайте команду на наклон камеры на 45 градусов вперед, потом на 45 градусов назад, потом влево, потом вправо.
- Это был тест на быстродействие.
Можно быстро сравнить эффективность работы разных стабилизаторов по тому, как смещается изображение луны в кадре.
Для более точного анализа потребуется видео редактор и графический редактор. Необходимо измерить величину луны на изображении в пикселях изображения. Если для вас это сложно, то измерьте линейкой на экране. Величина Луны равна 0,5 градуса. Далее, считая пиксели или используя линейку, вы можете установить величину нежелательного отклонения стабилизатора видеокамеры.
В видео редакторе надо вырезать фрагмент видео с умышленным вращением камеры от нейтрального положения до отклонения на 45 градусов. Продолжительность этого фрагмента позволит оценить быстродействие при контролируемом вращении.
Почему Луна? Потому, что ее видимая угловая величина одинакова во всем мире и составляет от 29′24″ до 33′40″.
Почему от -45 градусов до +45 градусов? Потому, что эти положения являются перпендикулярными и это легче установить зрительно.
Почему 5 секунд на 5 наклонов? Потому, что это соответствует режиму работы в экстремальных условиях. Повторяя пять наклонов подряд получаются более точные периоды.
Почему нет теста с боковым наклоном? Потому, что это нельзя обнаружить как отклонение луны.
Зачем дополнительный объект в тесте на дрейф? Потому, что Луна сама медленно смещается.
__________________________________________________
Есть предложения, замечания ?
Следующее полнолуние - 12 июля. Надеюсь, будет безоблачно.
Постараюсь распространить информацию, что бы набералось побольше тестеров по всему миру.