Activity
Сделал страничку, куда буду выкладывать свои STL файлы запчастей для вертолетов rus-off.net/3d-printer/.
Не ради флейма, а чтобы не потерять. Пока без особых комментариев, надо будет еще подумать.
Носитель - Mikado Logo 690, VBar NEO (VBC), Xnova XTS 4530-480KV 5+5YY, пиньён 13T. Графики кликабельные. Полеты примерно одинаковые в стиле “трынь-пынь”. Батареи одни и те же - 2x Forsage (декларируются как генсы) 6S 4000 60С, свежие - чуть больше 20 циклов.
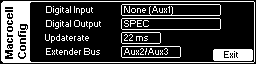
Hobbywing V4 130HV, гувер VBar. Целевые обороты 1980
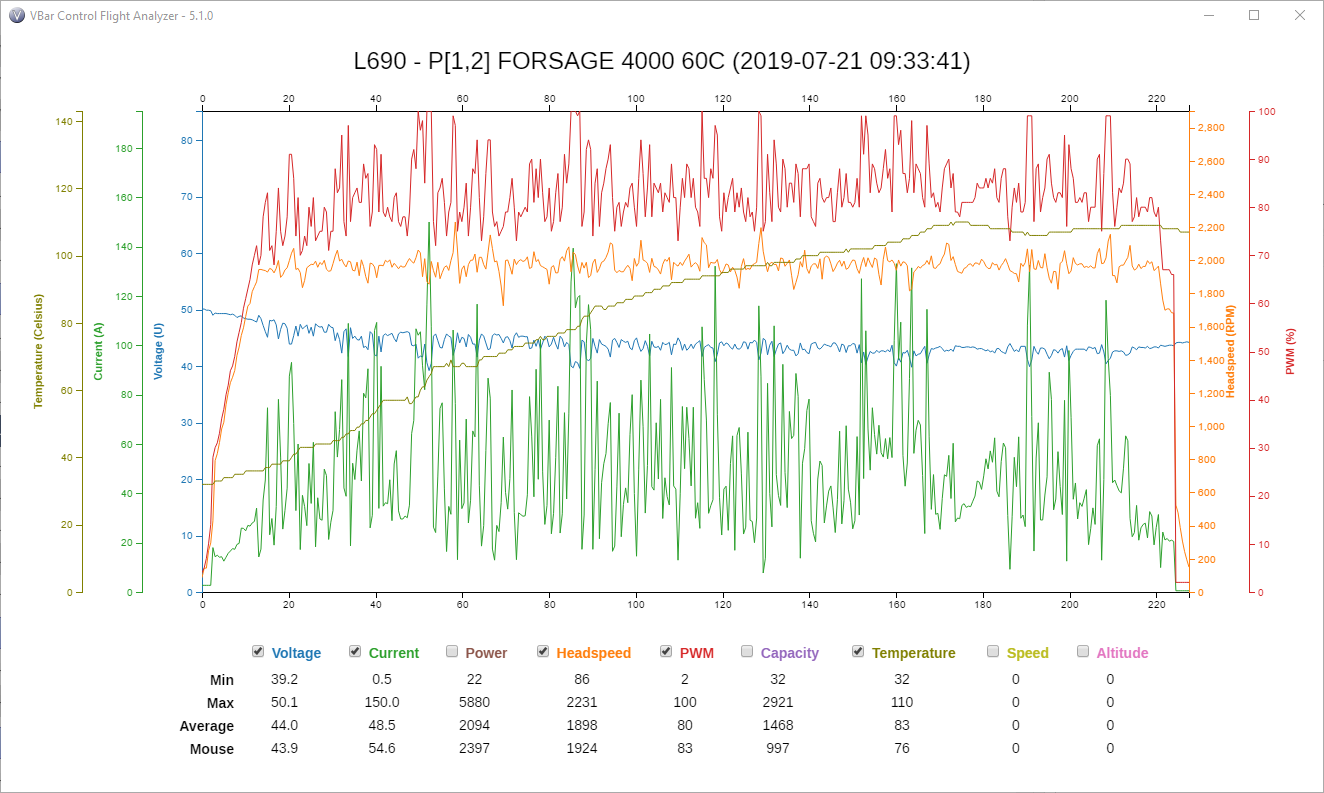
Как не крутил настройки, но либо сильные просадки, либо перекруты (как на картинке выше). Пробовал гувер HW, тоже не очень. На температуру можно не смотреть, я ее видимо криво считаю.
Kontronik Jive 120 Pro. Целевые обороты 1965
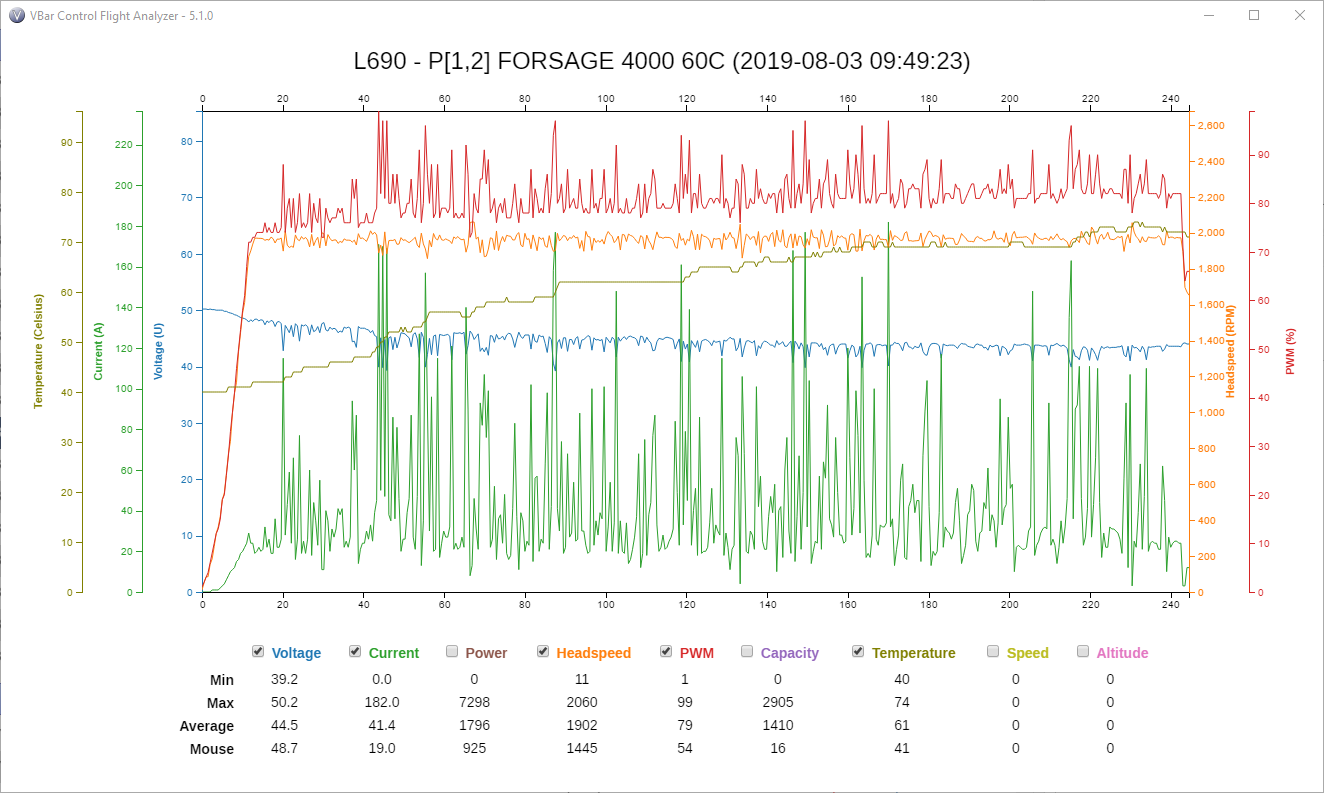
Из настроек, влияющих на гувер, пока только поставил Ri-comp 12 (нашел в спецификации мотора). Автотайминг.
Разница очевидна. Токи контрон показывает побольше, но это зависит от методики усреднения. По напряжению практически один в один, что косвенно говорит о примерно одинаковом полете. И звук мотора с контроном очень приятный.
А вот мелкий GAUI X3 (380 лопасти), VBar NEO (VBC), Xnova XTS 2618-1860KV, пиньён 13T. Регуль HW V4 60, гувер VBar. Генсы 6S 1450 45C, >160 циклов. Целевые обороты 2800.

Тут все замечательно. Ранее стоял HW V3 50 (помер), там картинка точно такая же была. И, кстати, HW60 делает рывок на раскрутке с гувером VBar, как и все V4. С V3 такого не было.
Как известно, у VBC нет PPM выхода, зато есть USB, через который можно напрямую без всяких переходников пользоваться моим любимым Heli-X. Шнурок немного мешает, плюс есть некоторое опасение рано или поздно разворотить разъем в передатчике, поэтому хотелось бы иметь беспроводной вариант.
Когда-то ради интереса решил попробовать вывести PPM через Vbar NEO с помощью приложения Macrоcells. Для проверки использовал давно пылящийся на полке легальный Phoenix (мир праху его), который на входе в свою волшебную коробочку требует именно PPM. Все заработало. Ну попробовал и забыл, Phoenix как симулятор мне не интересен.
Но вот недавно вот тут Игорь (mil-lion) написал про свой беспроводной “свисток” для Тараниса, сделанный из приемника SBUS и Arduino. Описание есть у него в дневнике. А первоначальная идея (правда c PPM) была взята вот отсюда.
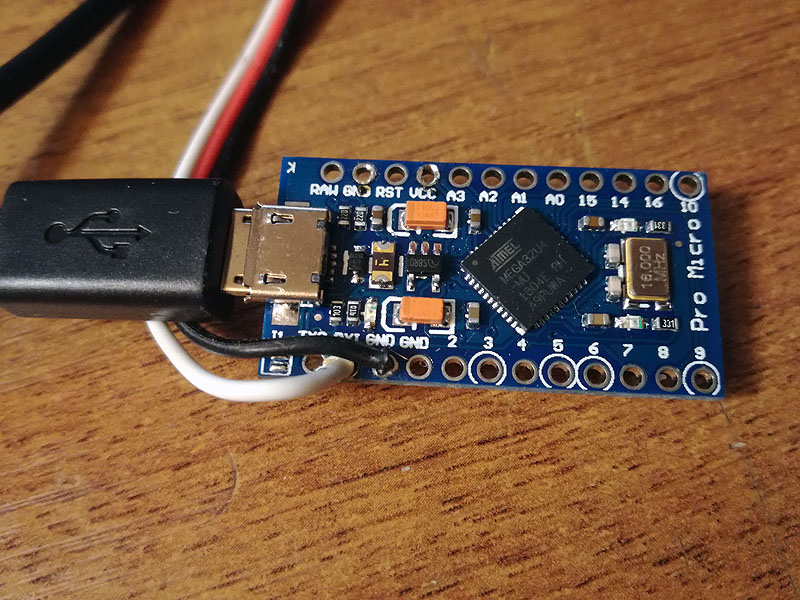
Решил и я попробовать, благо с помощью Macrocells можно и SBUS выдать. И неиспользуемый Vbar NEO у меня давно уже имеется. Первый облом случился по причине того, что имеющиеся у меня Arduino Nano через свой USB разъем могут только программироваться, использовать его для других целей нельзя. Пришлось купить вот такой.
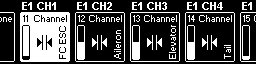
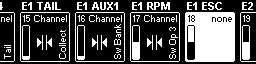
В понедельник забрал его на почте и стал экспериментировать. Добиться чего-то от SBUS не получилось. Может я что-то не понял, может у NEO он какой-то специфический (очень может быть - см. ниже). Решил подойти с другой стороны. Macrocells ведь умеют выдавать и другие протоколы, в частности сателлита Spe k trum DSM* (почему-то обозначенный у них в меню как SPE C). Но не суть. И протокол проще сам по себе - нет этой 11-битной упаковки, а данные идут нормальными 16 битами, и для меня Spektrum как-то привычнее. Спецификацию взял вот тут. И 7 каналов - ровно столько, сколько надо (5 стандартных - THRO, AILE, ELEV, RUDD, PITCH и два переключателя - банки и спасалка). В общем, после пары часов экспериментов данные стали нормально приниматься, основная проблема была с тем, чтобы поймать начало пакета. Но быстро выяснилось, что в поле fades все время приходит одно и тоже - два байта 0xf3 и 0x17 (243 и 23). Подозреваю, что это опять специфика NEO. Как это соотносится со спецификацией я не понял, там другое написано, зато появился маркер начала пакета.
Адаптировать код Игоря не стал, как известно проще написать своё, чем переписать чужое. Взял оттуда только код для джойстика.
Что получилось можно увидеть ниже. Работает отлично. По ощущениям - лучше, чем по проводу. Ну и очень приятно то, что все настраивается в VBC - полки, экспоненты… Главное - работает hold и его хитрые комбинации с переключателем Motor, чего по USB добиться в Heli-x не удалось. Скриншоты своих настроек прикладываю.
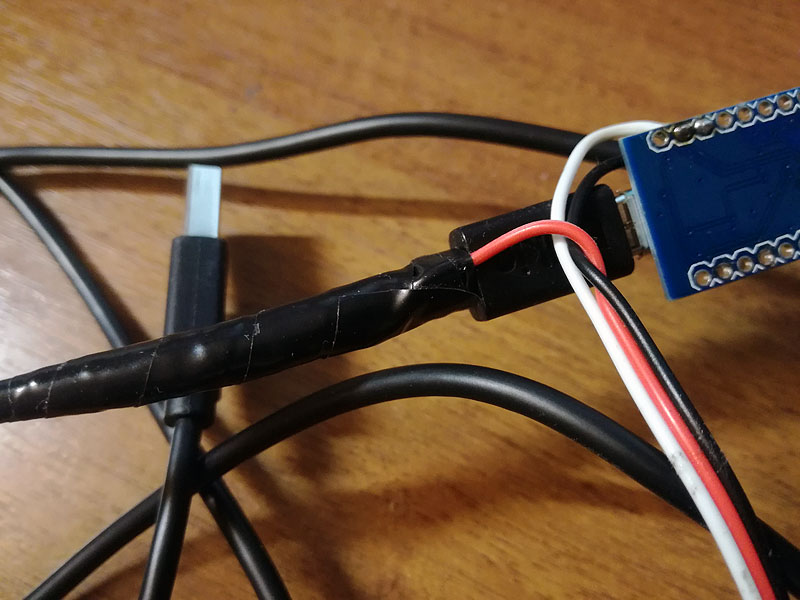
Питание (+) для NEO сначала пытался снимать с VCC Arduino, но там оно оказалось 4.2V и NEO отказывался с ним инициализироваться, бесконечно жалуясь в лог на напряжение ниже 4.5V. Взял из кабеля USB, аккуратно вскрыв оболочку и подпаяв туда провод. От идеи подпаяться к разъему на плате Arduino после недолгих размышлений отказался, уж больно там все мелкое.
Надо будет потом еще все это упихать в какую-нибудь коробочку.
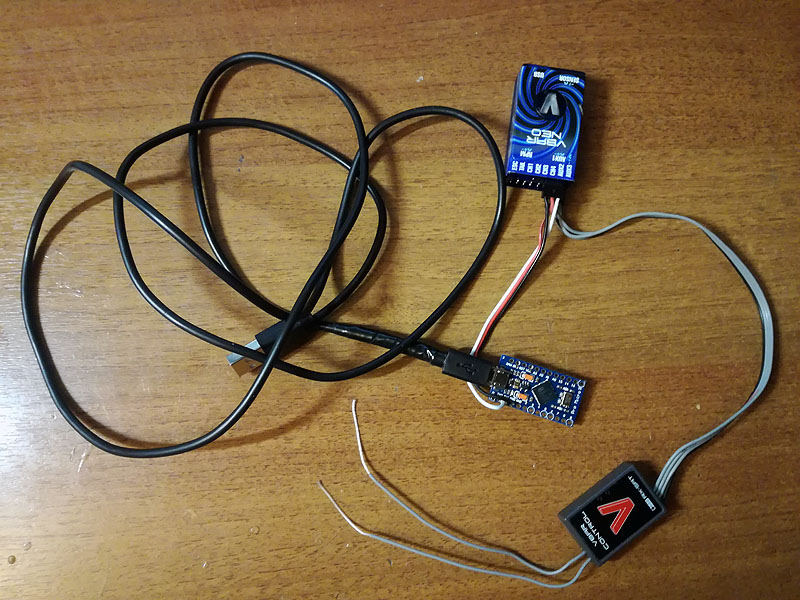
Сначала картинки:
Общий вид
Arduino
Питание для NEO
Настройки



Ну и код скетча. Местами даже с комментариями. Все по простому, заворачивать в классы не стал, не тот проект.
#include <Arduino.h>
#include <Joystick.h>
//-----------------------------------------------------------------------------------------------------------------------------------------//
// Use to enable output debug information to serial
//#define DEBUG
#ifdef DEBUG
#define debugPort Serial
#include <stdarg.h>
void debugInit() {
debugPort.begin(115200);
}
void debugPrintf(char *format, ...) {
char buf[80];
va_list ap;
va_start(ap, format);
vsnprintf(buf, sizeof(buf), format, ap);
va_end(ap);
debugPort.print(buf);
}
#else
#define debugInit() ;
#define debugPrintf(...) ;
#endif
//-----------------------------------------------------------------------------------------------------------------------------------------//
// Common
typedef uint8_t byte_t;
#define PHASE_WAIT_FOR_FADE_1 0
#define PHASE_WAIT_FOR_FADE_2 1
#define PHASE_RECEIVE_DATA 2
#define PHASE_PROCESSING_DATA 3
uint8_t phase = PHASE_WAIT_FOR_FADE_1;
//-----------------------------------------------------------------------------------------------------------------------------------------//
// Source
// Specification:
// Spektrum channels layout
enum {
SRC_CHANID_THROTTLE,
SRC_CHANID_AILERON,
SRC_CHANID_ELEVATOR,
SRC_CHANID_RUDDER,
SRC_CHANID_PITCH,
SRC_CHANID_AUX_1,
SRC_CHANID_AUX_2,
SRC_CHANID_AUX_3,
SRC_CHANID_AUX_4,
SRC_CHANID_AUX_5,
SRC_CHANID_AUX_6,
SRC_CHANID_AUX_7,
SRC_CHANID_LAST
};
// Port settings
#define srcPort Serial1
#define SRC_PORT_BAUDRATE 115200 // 125000 according to the specification, but doesn't work...
#define SRC_PORT_OPTIONS SERIAL_8N1
// Obtained after the data stream monitoring.
// I didn't understand why such data and I didn't find anything like this in the specification. Perhaps this is a feature of the VBC.
#define SRC_FADE_1 0xF3 // 243
#define SRC_FADE_2 0x17 // 23
#define SRC_FRAME_CHAN_COUNT 7
#define SRC_MASK_2048_CHANID 0x7800
#define SRC_MASK_2048_POS 0x07FF
byte_t buf[sizeof(uint16_t)*SRC_FRAME_CHAN_COUNT];
uint8_t bufIndex = 0;
uint16_t channels[SRC_CHANID_LAST];
void srcInit() {
srcPort.begin(SRC_PORT_BAUDRATE, SRC_PORT_OPTIONS);
}
//-----------------------------------------------------------------------------------------------------------------------------------------//
// Joystick
#define PULSE_WIDTH_MIN 344 // Minimal pulse (experimental)
#define PULSE_WIDTH_MAX 1704 // Maximal pulse (experimental)
#define PULSE_WIDTH_MID 1024 // Middle pulse = (MIN_PULSE_WIDTH + MAX_PULSE_WIDTH)/2
#define PULSE_JITTER 1 // Dead zone. If possible, do not use it.
#define USB_STICK_MIN -32767
#define USB_STICK_MAX 32767
#define USB_STICK_MID 0 // (USB_STICK_MIN + USB_STICK_MAX)/2
// Create the Joystick
Joystick_ Joystick(JOYSTICK_DEFAULT_REPORT_ID, JOYSTICK_TYPE_JOYSTICK, 2, 0, true, true, true, true, true, true, false, false, false, false, false);
void joyInit() {
Joystick.setXAxisRange(USB_STICK_MIN, USB_STICK_MAX);
Joystick.setYAxisRange(USB_STICK_MIN, USB_STICK_MAX);
Joystick.setZAxisRange(USB_STICK_MIN, USB_STICK_MAX);
Joystick.setRxAxisRange(USB_STICK_MIN, USB_STICK_MAX);
Joystick.setRyAxisRange(USB_STICK_MIN, USB_STICK_MAX);
Joystick.setRzAxisRange(USB_STICK_MIN, USB_STICK_MAX); // Not used. But when I disabled it (and set "false" in the corresponding Joystick parameter), then there were some glitches. Didn't understand yet.
Joystick.begin(false);
}
// Convert a value from range [PULSE_WIDTH_MIN, PULSE_WIDTH_MAX] to range [USB_STICK_MIN, USB_STICK_MAX]
uint16_t joyValue(uint16_t rcVal) {
if (rcVal > (PULSE_WIDTH_MID + PULSE_JITTER)) {
return constrain(
map(rcVal, PULSE_WIDTH_MID, PULSE_WIDTH_MAX, USB_STICK_MID, USB_STICK_MAX),
USB_STICK_MID,
USB_STICK_MAX
);
}
else if (rcVal < (PULSE_WIDTH_MID - PULSE_JITTER)) {
return constrain(
map(rcVal, PULSE_WIDTH_MIN, PULSE_WIDTH_MID, USB_STICK_MIN, USB_STICK_MID),
USB_STICK_MIN,
USB_STICK_MID
);
}
else {
return USB_STICK_MID;
}
}
void joySet() {
Joystick.setXAxis(joyValue(channels[SRC_CHANID_AILERON]));
Joystick.setYAxis(joyValue(channels[SRC_CHANID_ELEVATOR]));
Joystick.setZAxis(joyValue(channels[SRC_CHANID_RUDDER]));
Joystick.setRxAxis(joyValue(channels[SRC_CHANID_THROTTLE]));
Joystick.setRyAxis(joyValue(channels[SRC_CHANID_PITCH]));
Joystick.setRzAxis(USB_STICK_MID); // Not used
Joystick.setButton(0, channels[SRC_CHANID_AUX_1] > PULSE_WIDTH_MID);
Joystick.setButton(1, channels[SRC_CHANID_AUX_2] > PULSE_WIDTH_MID);
}
//-----------------------------------------------------------------------------------------------------------------------------------------//
// Application initialization procedure
void setup() {
debugInit();
srcInit();
joyInit();
}
//-----------------------------------------------------------------------------------------------------------------------------------------//
// Source data port handler
void getDataFromSrc() {
while ((phase != PHASE_PROCESSING_DATA) && (srcPort.available() > 0)) {
byte_t b = srcPort.read();
switch (phase) {
case PHASE_WAIT_FOR_FADE_1:
//debugPrintf("-%d", b);
if (b == SRC_FADE_1) {
phase = PHASE_WAIT_FOR_FADE_2;
}
break;
case PHASE_WAIT_FOR_FADE_2:
//debugPrintf("-%d", b);
if (b == SRC_FADE_2) {
phase = PHASE_RECEIVE_DATA;
bufIndex = 0;
//debugPrintf("\n");
} else {
phase = PHASE_WAIT_FOR_FADE_1;
}
break;
case PHASE_RECEIVE_DATA:
buf[bufIndex++] = b;
if (bufIndex == sizeof(buf)) {
phase = PHASE_PROCESSING_DATA;
/*
for (uint8_t i = 0; i < sizeof(buf); i++) {
debugPrintf("%d ", buf[i]);
}
debugPrintf("\n");
*/
}
break;
}
}
}
//-----------------------------------------------------------------------------------------------------------------------------------------//
// Main loop
void loop() {
getDataFromSrc();
if (phase == PHASE_PROCESSING_DATA) {
phase = PHASE_WAIT_FOR_FADE_1;
for (uint8_t i = 0; i < SRC_FRAME_CHAN_COUNT; i++) {
// big-endian!
uint16_t data = (buf[i * 2] << 8) | buf[i * 2 + 1];
uint16_t chan = (data & SRC_MASK_2048_CHANID) >> 11;
uint16_t pos = data & SRC_MASK_2048_POS;
/*
One cannot assume that a packet will have the same data in the same index in the servo[] array in each frame; it is
necessary that the Channel ID field be examined for each index in every packet.
*/
if (chan >= SRC_CHANID_LAST) {
debugPrintf("BAD CHAN %d\n", chan);
} else {
channels[chan] = pos;
debugPrintf("%d=%d ", chan, pos);
}
}
debugPrintf("\n");
joySet();
Joystick.sendState();
}
}
//-----------------------------------------------------------------------------------------------------------------------------------------//
В полёте
К сожалению, таких немного. Буду выкладывать, если найду ещё.
Новые фотографии добавляю в комментарии из-за ограничений на количество картинок в одном сообщении.




Практически при любом мало-мальском краше ломаются шаськи. Родные монолитные, да и дороговатые. Поэтому с некоторого момента стал использовать и на 300, и на 450 лыжи с хоббикинга. Стойки вот такие или такие, трубки вот такие. Получается и дешевле, да и ломаются обычно не все четыре детали сразу, опять экономия. На трехсотке обычно использую черные стойки - они чуть полегче и не такие жесткие. Если использовать белые, то их надо подпиливать немного в местах изгиба. Тогда они будут ломаться именно по пропилам. Иначе, обычно ломаются посередине и с большой вероятностью выворачивают крепление и ломают раму. Еще у белых надо спиливать буртики сверху, иначе не прижать. Ну и для обоих вариантов стоек необходимо просверлить в них отверстия для крепежа. Кстати, зато белые отлично подходят для GAUI X3, использую их там, креплю нейлоновыми 3 мм винтиками.
Качалки серв. При любом падении 1-3 штуки в минус. Специально использую ломающиеся такие или такие. Понятно, что это для серв TGY-306 или KST-215. Разницы между ними не заметил. Оранжевые чуть дороже да и в упаковке их 8, а синих 10. Но разница копеечная. Зато если, как часто бывает, тяга с обломком качалки улетит в сторону, то оранжевую искать легче. Усиления болтом с шайбами для трехсотки не делаю, для X3 делаю. Благодаря использованию ломающихся качалок редукторы серв ни разу не повреждались.
Следующий расходник при крашах - межлопастной вал. Тоже страдает практически при любом падении. Использую и родные, и Lynx. Родные довольно легко гнутся, Lynx может выдержать чуть более сильный удар, но зато потом ломается, цапфы с лопастями разлетаются, а вместе с ними в неизвестном направлении могут улететь демпферы, подшипники и линки. Попробуй их найди потом в траве. Поэтому я предпочитаю родные межлопастные. Да и стоят они почти в два раза дешевле.
Основная шестерня стала расходником после перехода на 4S. Если раньше 14 пиньен оставлял ей шансы, то маленький 11 сгрызает ее почти всегда, даже если успеть дернуть холд - за счет инерции мотора, да и наличие обгонки не способствует быстрой остановке. Раньше использовал шестерни Lynx, они были попрочнее, но и стоили 16 баксов за штуку вместо 9 за упаковку из двух родных. Да и нет их больше в продаже. Шестерни использую в основном косозубые, хотя и есть еще в запасе пара прямых с кучкой разных пиньенов для них. Особой разницы нет, ну косозубые работают чуть потише.
Следующий расходник - основной вал. Страдает чуть реже, но в половине падений уж точно. Ситуация как и с межлопастными - родные гнутся, Lynx ломается у выхода из верхнего подшипника рамы.
Подшипники рамы. Если пострадал основной вал, то верхний подшипник захрустит 100%. Да и даже при целом вале может. Средний страдает редко. Нижний менял только по возрасту.
Еще довольно часть ломается поддержка хвостовой тяги, особенно передняя.
Все остальное страдает редко.
Хвостовой плавник. За все время сломал один пластиковый и штуки 3 или 4 Lynx (карбоновых и оранжевых стеклопластиковых). Сейчас стоит недавно купленный оранжевый Lynx, он оказался из существенно более толстого материала. Думаю, проживет дольше. Хотя, вес - центровка…
Основные лопасти Lynx сломать можно только обо что-то твердое. Ломал об кирпичный блок, об дерево, об хвостовую балку. Но вообще это очень редко.
Хвостовые лопасти Lynx - на вид хлипкие, но опять же обычно ломаются только обо что-то твердое. Но все равно после каждого краша надо проверять - обычно они не ломаются, а трескаются по рискам, сразу и не заметишь.
Хвостовые балки - сломал несколько при падении на хвост. Одну порубил лопастями, хотя после этого выправил и хоть она была страшная на вид, но летала еще довольно долго, пока не заменил ее при плановом ТО.
Ремни меняю по мере износа. Обычно через 250-300 полетов. Ни разу не рвались.
Вместе с ремнем меняю и хвостовой вал - шестеренка на нем постепенно подъедается. Вал использую родной с пластиковой шестеренкой. Ставил Lynx с алюминиевой - заметно ест ремень и при этом сам тоже изнашивается.
Подшипники хвостового вала периодически проверяю. Обычно полетов 200 выдерживают.
Недавно заменил хвостовой слайдер. У него износилась втулка, которой он по валу скользит. Слайдер стал болтаться на валу. Но это больше 1000 полетов. Еще раньше изнашивались пины, которыми рычаг двигает слайдер. Это происходит из-за того, что шкив, куда они входят, вращается, хоть и стоит на подшипнике. Просто замял слегка шкив пассатижами, теперь он упирается в пины, не вращается и не стачивает их.
Рама Lynx. Недавно заменил боковины. У них в свое время были отломаны три из четырех креплений лыж (на этих же креплениях держится и нижняя пластина рамы). Отломал их при использовании белых стоек, о которых писал выше. Отломанное заклеил эпоксидкой с притянул стяжками. Но тут очень сильно приложил вертолет брюхом, все три приклеенных отвалились и сломалось четвертое крепление. Решил, что пора заменять.
Ну и несколько раз ломались карбоновые пластинки, к которым прикручиваются штыри крепления канопы. Пластинки продаются отдельно меняются за пару минут.
В остальном рама оказалась очень живучей.
Еще надо следить на наконечниками линков от тарелки к цапфам. Они постепенно разрабатываются и могут слететь. у меня такое было трижды. Первый раз повезло и удалось сесть с одной неуправляемой лопастью. На радостях защелкнул линк обратно, взлетел и через пару минут вертолет валялся на земле. Надо было не спешить, а ехать домой и заменять… В третий было не так давно, не уследил. Поэтому всегда проверяю линки перед полетным днем. Если они хоть чуть-чуть люфтят - сразу на замену. Наконечники использую вот такие. Для головы удобны вот такие линки со встречной резьбой, что позволяет настраиваться очень точно и без снятия наконечников с шариков.
Канопа Lynx “злая птичка” у меня эта летает с самого начала, сколько крашей пережила не счесть. Вся потрескавшаяся, вся заклеена стеклотканью с эпоксидкой. Но держится. На вид вблизи страшная, но в полете это не заметно. А расцветка у нее отличная, видимость супер. Поэтому ее и держу. Есть еще одна новая в упаковке Lynx канопа с другой, чуть менее яркой раскраской. Но смысл ее ставить не вижу. Пусть лежит. Да и все проблемные места уже проклеены, обычно она уже особо не страдает при падениях. Кстати о канопах. У Lynx они были двух типов - STD (по форме как родная) и Protos style - более компактная. Вторую использовать получилось только с пластиковой рамой. Очень тесная и короткая. На карбоновую раму она не налезала со вставленным аккумулятором. Хотя и на STD пересверливал отверстия крепления чуть назад, чтобы было проще надевать и можно было аккумулятор для улучшения центровки сдвигать вперед.
Судя по всему, приближается время, когда я, как не жалко, буду избавляться от этого маленького, но очень интересного вертолетика. Был он у меня без малого два с половиной года, доставил много приятных минут, даже скорее часов. Были, конечно, и проблемы. Но в общем все воспоминания скорее положительные. И решил пока все еще свежо написать этот текст, может кому и пригодится. Хотя вертолет этот и давно снят с производства, но выпускается его следующая, в значительной части похожая и совместимая по всему, кроме рамы, инкарнация - 300CFX, да и 270CFX это тоже ближайший родственник. Есть и другой, более дальний родственник - небезызвестный OXY 3, который явился творческим развитием апгрейдов для 300X.
Надо понимать, что по большей части пишу я здесь не про совсем стоковый аппарат, а вертолет собранный, в основном, из апгрейдов Lynx. С сетапом, который больше подходит для, пусть и не очень заряженной, но 450-ки.
Первые две части написал в выходные, сейчас немного подредактировал и выложил. Чуть позже будет третья часть с фото. Видео, к сожалению, практически нет.
Итак. Сначала это был простой Blade 300X. Купил его себе как подарок под ёлку к новому 2014 году. После блейдовских мальков mCP X, 130X, mCP X BL и nCP X (появлялись они у меня именно в такой последовательности) трехсотка показалось огромной и солидной. Летала она уже вполне по-взрослому, грозно фычала лопастями, в общем поначалу полеты на ней вызывали чувство эйфории.
Но через некоторое время стали вылезать и неприятные моменты. Главное - хвост. Источник постоянных вибраций, которые, в свою очередь страшно, не любит штатно установленная ФБЛ AR7200BX (далее просто “Бист”). И реагирует она на них очень неприятным образом - резким завалом вертолета на правый бок, так называемый RROD - Right Roll Of Death. Если знать о его существовании и быть к нему готовым, то вырулить можно и при этом очень неплохо бы еще успеть перещелкнуться на другие обороты, чтобы уйти с неприятной частоты вибраций. В первый раз я был не готов, да и даже не знал о существовании такой проблемы. Краш выявил другое (хотя и ожидаемое) слабое место - пластиковая рама. Она достаточно хрупкая, особенно зимой на морозце. Новая стоит копейки, но для ремонта требуется фактически полностью разобрать, собрать и настроить вертолет.
Благодаря участникам темы о трехсотке на этом форуме причина быстро выяснилась - да, это хвост со своими вибрациями. Попытки избавиться от них путем переборки с подбором деталек из разных комплектов запчастей (а ими тогда по старой мелколетной привычке запасся сразу и в большом количестве) особым успехом не увенчались. Вибрации могли быть чуть меньше и ФБЛ на них не реагировала, а потом могли стать больше… В общем, хоть падений по этой причине потом и не было, но летать в постоянном ожидании завала было уже не комфортно и эйфория тоже куда-то ушла.
Решение проблемы было двойное. Во-первых, замена сначала только хвостовых цапф, а потом и всего хвоста на Lynx существенно снизила вибрации. Во-вторых, заменил ФБЛ на ZYX S2. Изначально это было сделано по причине того, что к Бисту просто не лежала душа. Как у айтишника с, на тот момент, почти тридцатилетнем стажем у меня вызывала отторжение необходимость настройки системы путем нажатия микроскопичесих кнопочек на коробочке и анализа цвета и количества взмаргиваний лампочек. Очень напоминало начало моей трудовой деятельности, когда приходилось вбивать загрузчик в ЭВМ переключателями на консоли. Тогда это было не в тягость, но не в 21 веке же… А ZYX подключался проводом к компьютеру и даже к телефону по BT и очень наглядно и просто настраивался. А в качестве побочного эффекта выяснилось, что эта система совершенно не реагирует на вибрации. Ну или почти не реагирует и уж точно не валит вертолет на бок. Понятно, что вибраций должно быть минимум. Но их появление - это повод в переборке механики, а не втыканию вертолета в землю. Хотя по полетным качествам и количеству настроек Бист наверно и лучше, но и ZYX был совсем не плох. Жалко, что этот проект умер, судя по всему, под натиском клонов VBar’а.
После этого вертолет стал постепенно превращаться из Blade в Lynx. Точнее, замена хвоста была вторым шагом на этом пути. Первый был сделан сразу, еще до первого полета - заменил деревянные основные лопасти на пластиковые от этого же производителя апгрейдов. Лиха беда начало, Lynx стал вытеснять все больше и больше родных деталей.
В какой-то момент после долгих сомнений решился на замену пластиковой рамы на карбоново-алюминиевую. Основной аргумент против был в лишних ~50 грамм веса. Но к тому моменту уже заменил почивший родной довольно слабый мотор (он и по опыту других владельцев оказался не слишком долго живущим) на Hyperion 2213. Что повлекло за собой и замену родного слабого и примитивного регуля на CC Talon 35, а родных прозрачных серв с нежными пластиковыми редукторами на Align 415M/425M. После оценки номенклатуры имеющихся в загашнике запчастей и наличия к тому времени в запасе еще более мощного Hyperion 2216 (купил оба мотора на распродаже у японцев со скидкой 70%) и CC Edge 50 Lite принял решение не переделывать имеющуюся трехсотоку, а собрать вторую. Докупил кое-чего и трехсоток стало две. Первая на родной раме с 2213 и Talon 35. Вторая - с карбоновой рамой, стретч с 275 лопастями, мотором 2216 и регулем Edge 50. Обе на алайновских сервах и ZYX S2. Каждая по своему интересна, у каждой свой характер.
По резвости трехсотки получились примерно одинаковые - увеличенный вес второй скомпенсировался более мощным мотором. Стретч был чуть поустойчивей и за счет того же веса чуть лучше летал в моменты, требующие инерции. Но у него проявились и недостатки.
Первый - центровка еще больше сместилась назад. Убрал горизонтальный плавник, заменил родной пластиковый вертикальный на карбоновый, передвинул регуль немного вперед, аккумулятор тоже стал ставить со смещением вперед. Но все равно, вертолет вываливался из быстрых пируэтов, особенно в инверте - там без корректировки даже два оборота не получалось. Поставил (грешен) клона - К-Bar. После триммировочного полета пируэты стали держаться, хотя все равно, чудес не бывает, иногда задняя центровка заметна.
Вторая проблема - слабоватый хвост. Он и на 245 лопастях иногда сворачивался. А на длинных 275 под нагрузкой и подавно. Более-менее вылечилось только уменьшением углов по коллективу до 11.5 градусов и увеличением оборотов до 3500, а потом и до 3550. Было желание попробовать другие хвостовые лопасти - у меня стоят Lynx 47 мм, как-то они узковаты. Но родных у меня не осталось, думал купить комплектик плюс попробовать 50 мм от OXY (правда у них комель толще, надо спиливать). Первые так и не купил, а вторые покупал, но взял по ошибке 47 мм, смысла пробовать нет. Еще пробовал обрезать лопасти от 450, вроде и вес одинаковый с точностью до 0.01 и по форме один в один, но давали страшные вибрации. Ковыряться дальше не стал. Так и летаю на Lynx, по большей части устраивает.
Третья проблема вытекает из второй. Большие лопасти + мощный двигатель + большие обороты = большой расход энергии. Если летать активно, то аккумуляторам живется ох как несладко. Стандартных 3S 1300 - использовал нанотеки и желтые зиппи (типа таких, только 35С) - хватало впритык на 3:30 с напряжением в конце полета 3.55-3.60, что на пользу им не шло. Натотеки начинали явно деградировать после 50 таких циклов, после 80 летать уже было напряжно. Их отлетал несколько комплектов по 6 штук. Зиппи был только один комплект и отлетавший мало (что-то около 20 циклов), после чего перешел на 4S, о чем позже. Поэтому по их живучести ничего сказать не могу.
Летом прошлого года прям в полете сгорел мотор 2216. Как положено - с дымом, вонью, просадкой борта до перезагрузки ФБЛ и, как следствие, потерей управления. Ниже видео последних секунд жизни этого мотора, правда тогда не догадался снять как он дымился на земле. Правда видно хреновато, GoPro сильно удаляет.
Вертолет, несмотря на страшный звук, почти не пострадал. Видимо, сказалось падение с остановленным мотором и в достаточно высокую жесткую траву. На замену купил вот такой моторчик. В принципе, отличный вариант за такие деньги. Тянет отлично, не греется, совсем. Но это, возможно из-за нехилой турбинки, стоящей сверху. Один минус - вал имеет продольный люфт и сделан из мягкой стали. Надо было его сразу вклеить в подшипники, но как-то поленился. В результате через чуть больше 200 полетов возникла огромная проточка на валу по нижнему подшипнику. Подобрать другой вал не удалось, заказал новый такой же мотор, а до его прихода просто сдвинул вал в колоколе на ~2 мм, чтобы в подшипнике хоть частично оказалась целая часть и вклеил его за зеленый локтайт. Полетов 30 это отработало, потом все равно разболталось. В новом моторе заклеил вал сразу, больше 150 полетов все нормально.
Еще раньше в прошлом году заменил алайновские сервы, которые стали люфтить, а одна просто сгорела на TGY-306G (обычные, не HV). Стоят такие по кругу - все четыре, для хвоста вполне хватает. Прошли далеко за 500 циклов, вполне живы. Одна серва с самого начала ходила заметно туже других. Первое время следил за ней, но ничего - не грелась, не тормозила, до сих пор проблем не доставляет. Хорошие сервы. За одним исключением - генерят обратные токи, из-за чего один раз уронил вертолет - отрубились сателлиты. Проблема решается просто - повесил конденсаторы. Экспериментальным путем с помощью микадо теста подобрал емкость - 2*4700. Однако… Но что делать. Проблемы такой больше нет, точнее было еще одно падение по этой же причине, но тут сам дурак - умудрился воткнуть кондеры в ФБЛ мимо разъема, между рядами контактов.
Кстати, о другой (той самой первой) трехсотке с родной рамой. Летала, она все реже. Хватало и одного мелкого вертолета. А потом она и сама намекнула, что все… Два раза вертолет выходил из под контроля, причем очень неприятно - двигатель не отключался. Первый раз дома, при подлете после ремонта верт вдруг сам по себе медленно полетел вперед, потом завалился и начал чикен-денс на полу, на холд не реагировал. Благо, почти сразу съел основную шестерню и танец прекратился - просто лежал и визжал мотором. На память осталась только небольшая зарубка на шкафу. Подумал на оранжевые сателлиты - была у меня с ними и до этого проблема. Заменил. Но вскоре уже при полете на поле верт вдруг рухнул и опять стал биться в конвульсиях, не реагируя на холд. Мотор (2213) в обоих случаях был раскаленный и даже пованивал разогретой изоляцией. Вертолет в этот раз побился сильно, восстанавливать его не стал. Что это было так и не понял. ZYX S2 после этого с этими же сателлитами еще некоторое время полетал на 450, все OK. Под подозрением остался регуль Talon 35 и, возможно, мотор. С регуля снял термоусадку, все осмотрел и обнюхал - проблем не заметил. Собрал стенд из снятого сетапа, крутил, правда без нагрузки и этот мотор, и другой. Без сбоев. Теперь валяются этот регуль с мотором без дела. И ставить некуда, да и как-то стремновато немного.
Вернемся к оставшейся трехсотке, которая летает до сих пор. В какой-то момент стали напрягать горяченные раздутые аккумуляторы в конце полета. И тут на глаза попалась спецификация того самого нового моторчика и увидел там как-то поначалу незамеченное “Напряжение: 2-4S”. А что, это выход! Регуль Edge вообще 2-8S. Для перехода на 4S достаточно было поменять пиньен с 14 на 11 и перепрограммировать регуль (тогда еще использовал его гувернер). Ну и купить 4S аккумуляторы. Взял на пробу по одному желтому зиппи, синей турниге и пару нанонеков. Все 4S 1000, по размеру и суммарной емкости получается практически один в один с 3S 1300. Зиппи и турнига не потянули, совсем. А вот нанотеки показали себя отлично. Отдавали сколько просили, почти не грелись. Только время полета сильно не изменилось - продолжаю летать те же 3:30. Но напряжение в конце уже чуть больше ~3.65, что благотворно сказывается и на батарейках. Чудес не бывает, весь выигрыш исключительно за счет снижения токов и, как следствие, потерь на разогрев регуля и мотора. Докупил комплект до 6 штук, 5 из них (шестой докупил позже) отлетали уже под 60 циклов, пока все хорошо. Ну может чуть-чуть стали теплее, но и на улице сейчас уже лето.
Вообще, подбор аккумуляторов для трехсотки - одна из актуальных проблем. Выбор не так и велик был. Сейчас, как я вижу, ситуация чуть выправляется из-за увеличения популярности гоночных квадриков 250 размера, где как раз используются аккумуляторы подобной емкости. Можно попробовать выбрать что-то оттуда.
Про гувернер. Долгое время использовал гувернер в регуле. В принципе, в CC он неплохой. И хотя, как писал выше, поставил K-Bar, но использовать его гувернер не получилось. Он хоть и клон, да не до конца. Вот тут есть классификация клонов. Не работает на нем гувернер, точнее даже наверно работает, вот только не принимает данные с датчика оборотов. А без них, понятное дело, ничего не выйдет. Был у меня еще другой клон GV8000, на котором гувернер работал. Стоял он на 450, да вот только спалил его по невнимательности, воткнув USB кабель мимо - вместо нужного разъема в соседний для BT. Судя по всему, подалось там 5 вольт куда не надо и коробочка не то чтобы окирпичилась, просто “ушла в себя”. Все работает, на команды с передатчика реагирует, на положение вертолета тоже. Вот только подключиться для настройки уже нельзя - ни по USB, ни по BT. По USB даже при первой подаче питания загорается лампочка соединения и считываются данные - видимо в этом случае ФБЛ сама без запроса “выпихивает” их в интерфейс. Но при попытке записи ошибка.
Так вот некоторое время назад купил для 500 Гоблина VBar NEO, а стоявший на нем VBar Mini освободился. Ну и поставил его на 300 именно ради гувернера, благо в Edge уже есть проводок с внутреннего датчика оборотов. Воткнул его, все настроил. И вертолетик-то полетел поинтереснее. И батарейки стали выедаться поменьше - остаток уже ближе к 3.7. И обороты стали лучше держаться, что хорошо видно по логам самого Edge. Ну оно и понятно. Одно дело, когда регуль сам пытается обороты держать. Увидел, что проседает - поддал копоти, увеличиваются - сбросил газ. Другое дело, когда этим ФБЛ занимается, она-то знает, что сейчас шагу до упора даст, поэтому и одновременно, а то и превентивно может дров подбросить. В результате и аккам полегче - похоже, от них требуют более плавной отдачи, чем когда регуль в попытке вытянуть давит по полной. В общем, в логах график оборотов намного ровнее стал, акки чуть меньше высасываться. Сплошные плюсы.
Провел эксперимент. Удачный. Жалко, что за неделю до этого уже купил упаковку меток.
Аккумуляторов только два, поэтому привыкание немного затягивается. Заказал еще пару. Да еще это первые выходные с нормальной погодой.
Пока забираюсь повыше и немного подальше.
Что-то только, похоже, с интерлейсом на видео беда, недосмотрел при преобразовании.