Activity
Согласно видео которое выложено здесь снял ограничение на высоту, смог на 4ке обычной подняться на 1400м, потом оборвало связь, по ее восстановлению приложение начало орать о сильной про садке батарее, хотя на всех банках было 3,85 и успокоилось только после посадке (включился принудительный возврат домой) на батареи при этом оставалось еще 50% которые потом спокойно отлетались. При использовании файлика список частот не появляется, а появляется только если перевезли телефон на английский язык. Телефон на android 5.0.2. Так и должно быть?
Поделитесь пожалуйста проверенными настройками для 4ки обычной, для асистента. Спасибо.
Для истории: Asus Zenpad Z300CNG - не подходит, в dji go лаг видео около 2х секунд, в Litchi изображение рассыпается.
Поиск по теме находит только упоминания про 1й мипад, а 1й и 2й различаются процами…
Кто нибудь летает на Xiaomi MiPad 2 ? Интересует лаг и как ведет себя экран на солнце?
Проверял - тоже папки RegionCode не было, ее создание и забрасывание файлика результата не приносят.
Да могут. Проверено на 100мв передатчиках (только прошивка должна быть родная, Байчи запустить не получилось 😦 )
Ссылки -
Подакажите пожалуйста:
В мануалах указано что можно с пульта фантома 4го остановить выполнение задания (возврат домой и смарт режимы), я перепробовал все возможные варианты но коптер на них не реагирует, задание можно отменить только с телефона/планшета. Что и где нужно поправить/настроить?
Подскажите как заставить работать Litchi 3.5 на xiaomi redmi note 2, dji go работает и видит нормально, а если запустить Litchi оно говорит что коптер не подключен.
Режим отладки включен (без него dji go не видит пульт).
Разобрался - чтобы запустить любое приложение после другого нужно перезагружать пульт. При включении пульта выскакивает запрос какое приложение запустить, без этого приложения не работают.Исключение - приложение для панорамы (F360) оно вообще не как не работает 😦
Может кто подскажет рабочее приложение для панорам.
Вы случайно когда DJI GO запускали,не нажали при запуске надпись"запускать всегда" или что то в этом роде (ньюансы перевода зависят от аппарата).
Если нажали,снимите с DJI GO привязку в диспетчере приложений.
Нет привязки не делал.
Очищал память, перезагружал телефон, не включая go включал личи. Не помогло 😦
Подскажите как заставить работать Litchi 3.5 на xiaomi redmi note 2, dji go работает и видит нормально, а если запустить Litchi оно говорит что коптер не подключен.
Режим отладки включен (без него dji go не видит пульт).
Насколько проблематично из него получить uart с NMEA? Хочу использовать его для передачи данных в поисковый маяк.
А какой тип подключения и протокол у gps модуля 4го фантома?
Пока нормальный приемник в пути, решил добить работу OrangeRX Open LRS TX 100 mv как приемника для Baychi .
Схема передатчика во вложении (срисована с платы)
настройка в прошивке
#define SDO_pin 9 // PB1
#define SDI_pin 8 // PB0
#define SCLK_pin 7 // PD7
#define IRQ_pin 2 // PD2
#define nSel_pin 4 // PD4
#define IRQ_interrupt 0
#define nIRQ_1 (PIND & 0x04)==0x04 //D2
#define nIRQ_0 (PIND & 0x04)==0x00 //D2
#define nSEL_on PORTD |= 0x10 //D4???
#define nSEL_off PORTD &= 0xEF //D4???
#define SCK_on PORTD |= 0x04 //C2???
#define SCK_off PORTD &= 0xFB //C2???
#define SDI_on PORTB |= 0x02 //PB0???
#define SDI_off PORTB &= 0xFD //PB0???
#define SDO_1 (PINB & 0x01) == 0x01 //PB1???
#define SDO_0 (PINB & 0x01) == 0x00 //PB1???
#define SAW_FILT_ON _spi_write(0x0e, 0x04); // GPIO2=1
#define SAW_FILT_OFF _spi_write(0x0e, 0x00); // GPIO2=0
#define GREEN_LED_pin 13 //PB5
#define RED_LED_pin 12 //PB4
#define Green_LED_ON PORTB |= _BV(5);
#define Green_LED_OFF PORTB &= ~_BV(5);
#define Red_LED_ON PORTB |= _BV(0);
#define Red_LED_OFF PORTB &= ~_BV(0);
#define Servo1_OUT 5 //Servo1
#define Servo2_OUT 6 //Servo2
#define Servo3_OUT 7 //Servo3
#define Servo4_OUT 8 //Servo4
#define Servo5_OUT 9 //Servo5
#define Servo6_OUT 10 //Servo6
#define Servo7_OUT 11 //Servo7
#define Servo8_OUT 12 //Servo8
#define Servo9_OUT A4 //Servo9
#define Servo10_OUT A5 //Servo10
#define RSSI_MODE 1 // 0=disable 1=enable
#define RSSI_OUT 3 // PORTD.3
#define Serial_PPM_OUT_HIGH PORTD |= _BV(7) //Serial PPM out on Servo 3
#define Serial_PPM_OUT_LOW PORTD &= ~_BV(7) //Serial PPM out on Servo 3
#define SBUS_OUT_HIGH PORTD &= ~_BV(7) // SBUS out
#define SBUS_OUT_LOW PORTD |= _BV(7) // SBUS out
#define SBUS_OUT_BIT _BV(7) // SBUS out bit
#define SBUS_OUT_PORT 2 // SBUS out port
unsigned char offOutsMask[3] = { 0xE0, 0xCF, 0x1F }; // маски портов, при сбросе всех импульсов в 0
volatile unsigned char *portAddr[PWM_OUT_NUM] = { // адреса портов, поканально
&PORTD, &PORTD, &PORTD, &PORTB, &PORTB, &PORTB, &PORTB, &PORTB, &PORTC, &PORTC
};
unsigned char portMask[PWM_OUT_NUM] = { // маски портов поканально
_BV(5), _BV(6), _BV(7), _BV(0), _BV(1), _BV(2), _BV(3), _BV(4), _BV(4), _BV(5)
};
unsigned char diskrMask[8] = { // маски выходов
_BV(5), _BV(6), _BV(7), _BV(0), _BV(1), _BV(2), _BV(3), _BV(4)
};
unsigned char soundOut[] = { 1, 2, 7 }; // номера каналов, куда выводится звук через D5, D6, D11
#define PPM_MODE_JUMPER 6 // проверка на режим PPM
#define SBUS_MODE_JUMPER 0 // режим SBUS
Нужен только PPM и RSSI выходы.
Что еще сдесь нужно поправить?
Светодиоды и приемник выставлены правильно.
Т.е нельзя перешить передатчик в приемник? Чтобы вывести только PPM и RSSI порты.
Подскажите пожалуйста в связи отсутствием в продаже приемышей OrangeRx Open LRS, возможно ли использовать как приемник OrangeTx Open LRS (футабовский)?
Если да то какой прошивкой его прошить? Планирую использовать в паре с
передатчиком
К нам через посредника получается дешевле чем с али. Но вопрос не в этом, а в том почему с дополнительном акумом так дешево, стремно как то.
Подскажите в чем может быть подвох www.ebay.com/itm/…/262419038854 почему такая низкая цена? p.s: не реклама.
Добрый день!
Помогите подружить “Megapirate X” c ACS758LCB-100B.
Датчик тока выбрал в 100А, калибровку в “0” сделал, но показания датчика в холостом режиме скачут от минус до +160А.
Syberian , на работе завал 😵 не когда пробовать пока. Я пытался через UBLOX Ucenter поменять настройки. Через тот который лежит на сайте скачивается только файл конфигурации, а что в том текстовике нужно поменять чтобы переключить режим? В Интернете находил что в старых(весь нет перерыл так и не нашел) версиях выставляется не через текстовый файл.
Кстати, от авр-ки его отцепляли? прошивку затирали? Rx-Tx не попутаны? Питание на модуль поступает?
От аврки не отцеплял(дорожки не резал), залил просто пустой скетч. Подключал просто к компу, строчки бегут. RX TX пробовал менять местами(с передергиванием питания) результат тот же.
Syberian, а что по поводу u-box с вотрекса? Не сделали пока? Прошивку обновил и пробовал подключать - система отвечает что gps не найден.
Сам BLACK VORTEX дербанить и не нужно, если аккуратно припаять то он остается рабочим(только пустой скетч залить). Я использую от вотрекса: датчики, ком-порт, сегодня попробую и джипс запустить.
Померла моя OSD 😦 . Кто нибудь знает номиналы конденсаторов и что за транзистор стоит??? Теле мастера сказали что не может там стоять p-n-p транзистор.
Если повезет на входных будут полевые испытания.
Подскажите по подключению е-осд к Megapirate X. Точки подклюения к плате
 такие? Осд по умолчанию включено или его нужно включать из наземной станции? Я перерыл всю схему по нескольку раз но осд работать не хочет, пробовал заливать тестовую прошивку чтоб проверить ножки PB5 и PE5, светодиоды нормально моргают. Транзистор в осд шке целый.
такие? Осд по умолчанию включено или его нужно включать из наземной станции? Я перерыл всю схему по нескольку раз но осд работать не хочет, пробовал заливать тестовую прошивку чтоб проверить ножки PB5 и PE5, светодиоды нормально моргают. Транзистор в осд шке целый.
Syberian , а если использовать датчики с вотрекса, возможно ли использовать и gps из него?
Подскажите что нужно изменить, в прошивке, еще кроме как в APM_Config.h
поменять с
#define FRAME_ORIENTATION X_FRAME
на
#define FRAME_ORIENTATION PLUS_FRAME
чтобы перейти на конфигурацию “+” ?
Пришла рама DJI 450 Frame, а на нее black vortex ,без переделки возможно поставить только в “+”.
Пробовал прошивки MegaPirateNG_2.0.49_BV_GPS_OK и MegaPirateNG_2.4.1, на обеих идет сильный расколбас. Но если присмотреться к квадрику то он пытается лететь в конфигурации “Х”. Моторы подключены согласно 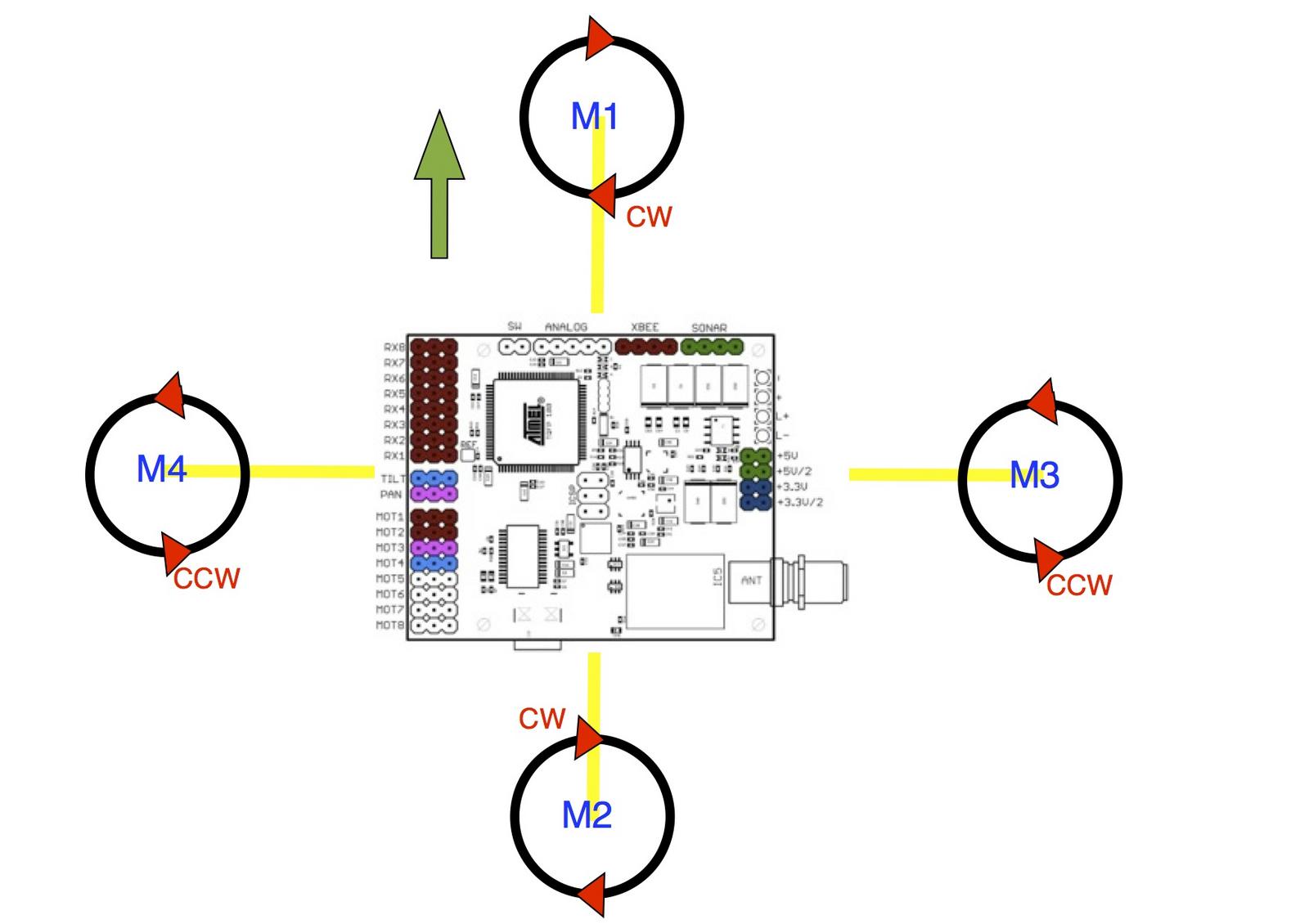
Сколько сейчас времени проходит от оплаты до отправки? Заказ висит в ожидании печати уже неделю, хотя все в наличии.
А по поводу регулятора некто не подскажет? Меня смущает надпись в описании "Motor Type: Sensorless Brushless",
. Судя по тому что я нашел то Sensorless моторы содержат в себе датчики хода. Так ли это? растолкуйте пожалуйста.
Покритикуйте набор для Skywalker(НЕ реклама!):
Мотор
hobbyking.com/…/__18119__Turnigy_Aerodrive_SK3_353…
Регулятор
hobbyking.com/…/__16892__Hobby_King_60A_ESC_4A_UBE…
В теме проскакивало что возможно использовать регулятор на 40А. Но т.к ток двигателя 38А, неохота рисковать.
Сервы - 4шт
hobbyking.com/…/__10346__Corona_939MG_Digital_Meta…
Винт
hobbyking.com/…/__5439__APC_style_propeller_9x6_E.…
Может что лучше поставить?. Батарея в наличии 4500 35-70С.
romushock, на некоторые модули нужно подавать логическую “1” на некоторые нет, нужно подавать на старые модули, на новые нет .У новых имя по умолчанию “levon”(помоему так, но точно начинается на “L”) и название HC-06, а у старых название HC-04 и они описаны на хорошо хабре. С гудлака пришли как раз HC-06. Проверено работают с платой BLACK VORTEX после настройки модуля.
P.S: если нужно на HC-06 есть даташит китайский, могу скинуть.
Кто нибудь из Украины заказывал большие, от 1,5 метра, самолеты в частности Skywalker или MQ-9 Reaper ?
Набросал корзину, оформляю заказ, а на последнем шаге выдает что посылка больше 2х метров. Есть ли какой способ привезти такой самолет в Украину?
P.S: Если кто знает где купить Skywalker, чтоб доставили в Украину киньте в личку ПЛИЗ!
это такой новый ОСД называется Black Vortex HUD или bvHUD
так все же это что-то железное или изменение в прошивке для Black Vortex?
Кстати, специальная версия для BV уже не нужна, последние прошивки отлично работают на BV.
Это радует 😃 , на выходных потестю.
а работу последних версий на BV с APC220 никто не проверял? т.к у меня на MegaPirateNG_2.0.49_BV_Beta_GPS_OK не работала связь на через APC.
Syberian, можете подсказать что изменить в прошивке что бы заработало E-OSD с вашей прошивкой?
Вопрос: я них сейчас акция, если добавляешь товара на стоимость более 30 у.е, то идет бонус. Получается окно бонуса показывает, а как добавить его в корзину?
Заказываю регулярно… Пришло 20 из 20 без каких либо проблем
а с таможней как если заказ больше 200 евро (270 у.е) ?
Кто нибудь из Украины пробовал через шипито заказывать? Могут они занизить инфойс, чтоб пройти через таможню?
Если вы сделали Setup ->Level, и не трогали плату, то в планере должен быть ровный горизонт.
Подскажите где у меня ошибка, получается сделал калибровку радио и уровня через планер (не через терминал), пиды не трогал. Уровень в планере был ровным. Даю газу коптер взлетает и передом платы ,конфигурация “Х”, летит сразу вперед, стики в при этом в центре. Что где подправить(отрегулировать) чтоб ровно взлетал, а не пытался куда то удрать.
P.S: просьба сильно не пинать,я только учусь.
P.S.S: пошел искать где купить симулятор с моделями коптеров.
Sir Alex, можете по подробнее рассказать про автомуровень и автотримирование с пульта(если я не ошибаюсь это Вы про него рассказывали на rcgroups). На каких прошивках это работает, и может еще какие то вкусности есть?
Принимайте в свои ряды, я наконец то сегодня взлетел 😃 , не совсем удачно (коптр чуть не удрал от меня).
Может кто то подскажет что то по поводу того то я спрашивал на прошлой странице ?
Кто нибудь пробовал 12-in-1 USB 2.0 Almighty Flight Simulator Dongle (не реклама) работает ли он с Turnigy (FlySky) ?