New entries

Решил построить вертолет своими руками. выбор пал на 550 рекса. смотрите сами
Вот что спасет нас от этого трэша)
Ко мне приехала Simple PDB плата, а это значит пришло время перестройки! Старая компоновка уже успела надоесть, аккумулятор всё время отлетает при крашах. Поставил мобиус - теперь они улетают вместе.
Поэтому я решил убрать как можно больше электроники внутрь первого этажа, расширенного до 10мм проставками (Юлиан своей новой сборкой тоже вдохновил, да и вот этот товарищ.
Итак, если с уменьшением высоты CC3D всё очевидно - там достаточно выпаять вертикальные штырьки и запаяться напрямую к плате - то с упаковкой приёмника FlySky IA6B всё намного сложнее. Даже без корпуса его высота порядка 15мм за счёт того, что к его торцу припаяна перпендикулярно плата с выводами. Как раз эту плату и было решено отпаять. Перед началом я прозвонил соединение и сохранил распиновку:
Андрюха кено снял про наши полетушки 😃
Удалось немного полетать в крытой студии на очень тесной трассе. Принимали участие в съемках репортажа Матч ТВ про гонки на коптерах.
Таки я его дожал.
Месячный НИОКР увенчался успехом.

На сайте ведомства FAA, которое в США отвечает за эксплуатацию летательных аппаратов, на всех владельцев беспилотников массой от 250 г до 25 кг с 21 декабря этого года распространяется требование пройти процедуру регистрации - речь идёт о частных владельцах БЛА, которые не используют их для извлечения выгоды.
RC best momenys 2015 - лучшие моменты
оригиналы можно увидеть тут:
Продолжим пожалуй, дурняк крепчал 😃
Испытания колец.
Поначалу было сложно попасть, т.к. колечко с 20 метров уже не видно, но потом приловчился 😉
Свечение в пасмурный день практически не помогает, посмотрим что будет в темноте (на снегу).
FPV вид
www.youtube.com/watch?v=5xgxqrFHl3g
Вид со стороны
Вода VS бесколлекторный мотор, дурняки продолжаются 😃
Горячий ЗИП.
Поскольку я клеил клеем УХУ-ПОР, перед ошкуриванием нужно сделать следующее:
смачиваю жидкостью для снятия лака (отобрал у жены) тряпку и удаляю этой тряпкой клей, который выступил по швам:

Нарезал! Все детали для сборки летающего крыла “Сова” поместились на четырех блоках 300*400мм и одном блоке 100*300мм, материал - экструдированный пенополистирол.

Пронумеровал детали. Детали с буквой R - для правой половины, с буквой L - для левой. Детали с буквой К - для крыла. Номерация от носа - к хвосту и от корня крыла - к законцовке.
Приобрёл пульт Avionix (один из клонов Turnigy 9X) и, разумеется, руки непомерно чесались прошить его на er9X. Только вот проблема - USBasp у меня не было и на радиорынке его, разумеется, не нашлось.
Зато у меня был Arduino Nano. И, как оказалось, им тоже можно прошить.
Процедура подпайки проводов описана для обоих ревизий неоднократно.

Немного предыстории
Практически с самого начала моего увлечения мультироторами я летаю на Cleanflight. До поры до времени меня всё устраивало, но когда мне надоело летать низко-близко встал вопрос возврата домой (обычного и по отказу РУ). После некоторого ковыряния в коде я решил переделать всю навигацию с нуля.
Так в апреле 2015 года началась работа над проектом Nav-Rewrite (который позже переименовался в iNav).
Главной идеей проекта стало добавление к “официальному” Клинфлайту продвинутой навигации.
Как, наверное, многие знают, проект OpenPilot перестал поддерживать полётные контроллеры CC3D. Соответственно, чтобы пользоваться CC3D приходится сидеть на старой версии.
Многие разработчики OpenPilot отпочковались в отдельный форк, LibrePilot. Совсем недавно, в ноябре, они выпустили свой первый релиз.
Изменений по сравнению с OpenPilot GCS 15.02 совсем немного. Главное для меня то, что они пофиксили креш на Mac OS - OpenPilot вылетал при перезагрузке полётного контроллера, в итоге визард приходилось проходить N раз, да и вообще было ощущение что вот-вот вылетит, и настройки потеряются.
Итак, я поставил LibrePilot, прошёл Wizard c нуля, по ходу обновил прошивку в CC3D до той, которую заливает LibrePilot. Выбрал предустановленный сет настроек “ZMR250 Chinese clone” - я раньше использовал его в OpenPilot, меня устраивает, всё стабильно и резво.
Остальное всё прошло абсолютно так же, как и в OpenPilot, разве что ничего не вылетало. Тестовый взлёт в домашних условиях прошёл успешно, на месте висит стабильно. Теперь нужно протестировать в поле.
Мотор SkyRC 1350KV сенсорник, регуль Xerun 150A


Несмотря на наезды некоторых Аксакалов, решил продолжить нести разумное, доброе вечное в не окрепшие умы вновь обращенных моделистов-коптероводов, первая серия видео ликбеза-плата распределения питания, что это, для чего, и как сделать изговнаипалок если сильно приспичило, а в доме нету 😃
Пульт Devo12E - сложная и непростая конструкция от компании Devention, которой оснащаются все продвинутые модели от Walkera - с 350Pro до Voyager3. Но разобраться в ней зачастую непросто, даже когда оно идёт в комплекте с аппаратом, поэтому пошагово опишу настройки пульта.
Базовая навигация в меню пульта: вход в меню по ENT; далее EXT - сброс, ENT - выбор, UP/DN и R/L - вверх-вниз и влево/вправо (что зачастую равноценно).
Прошивка
Для начала следует обратить внимание на прошивку: Ent - System Menu - About. Если прошивка (software) ниже 1.5 или версии B - смело переходим к обновлению прошивки, хуже не будет.
Существует две основных версии прошивки - 1.5 Pro (с настройками стиков и прочими полезностями) и 1.6 lite (удобная, но без настроек). Для начала работы крайне рекомендую выставить прошивку 1.5А.
Буквенные литеры прошивок олицетворяют максимальную мощность передатчика - для B-версий она ограничена 10 mw, т.е. +10dB; А-версии позволяют выставлять 100mw, т.е. +20 dB (System menu - Power Amplifier). А больше ничем они не отличаются, так что про В-версии смело забываем.
В последнее время огромную популярность получили видеообзоры всего. Наверное чтение и написание текстов становится чем то невероятно сложным. 😛
Я всё обозревать не стану, у меня нет всего. Моторчиков нет, самолётов нет, коптеров нет. Но у меня есть объектив и я его обозрею.

Вот такой обозреваемый. А теперь собственно обозреваем.
Пришли супер легкие моторчики для подвеса камер го-про и мёбиус класса.
Накидал небольшой обзорчик 😃
Вес моторов с проводами всего 18г.
Почему нужно подключать сигнальный земляной провод, и почему “а у меня и без него работает”.
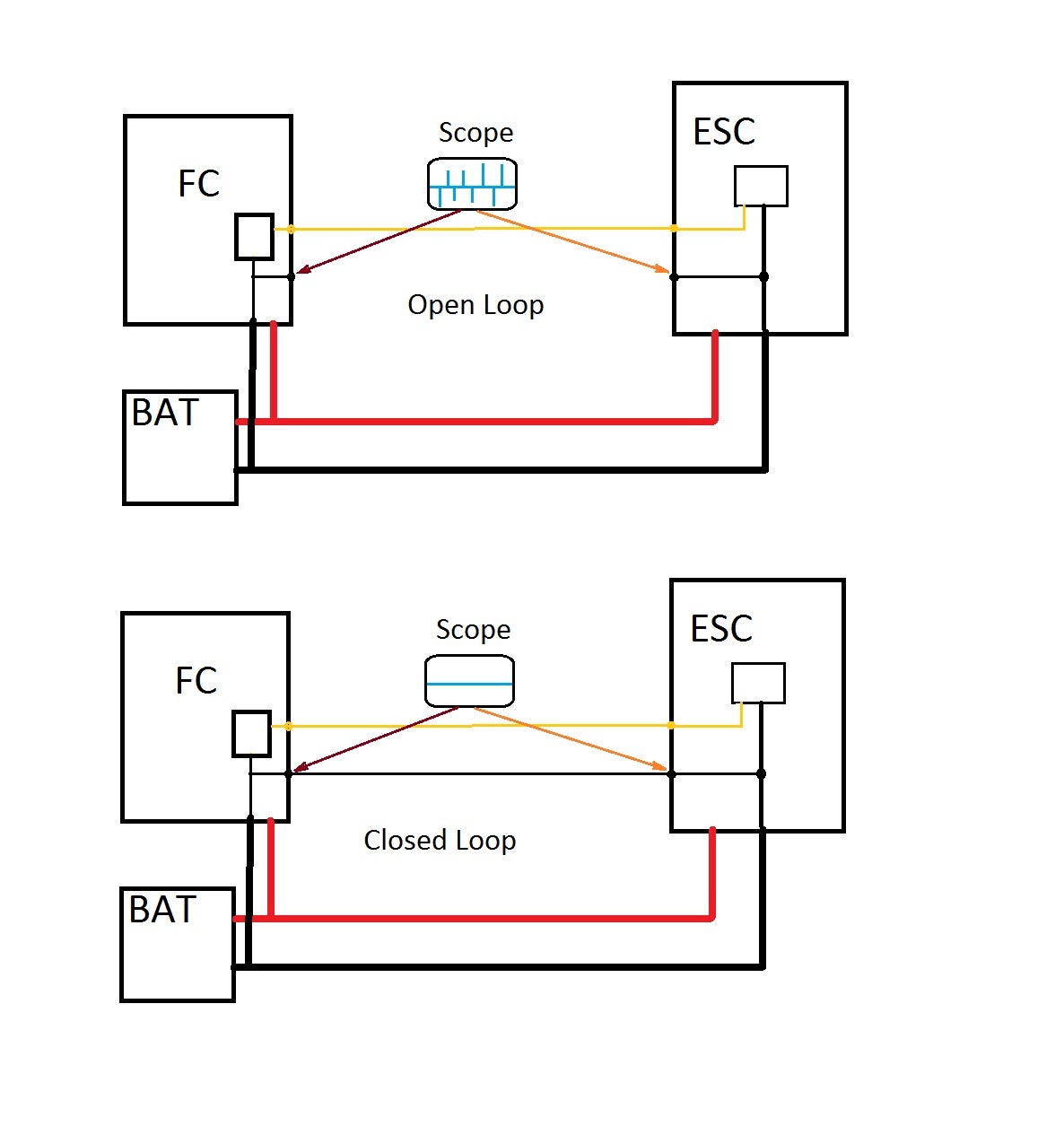
I do that type of scope measurement and we have a saying, “ground is not ground is not ground”. Meaning there is ALWAYS a Potential difference between two points if any current flows (Ohm Law: E = I*R).
Решил вот немного пографоманить и сделать что-то типа упрощенного обзора на процесс овладения радиоуправляемым вертолетом без особого углубления в технические подробности. Чтобы интересующиеся, пока еще в качестве «чайников», хотя бы приблизительно представляли себе, как это выглядит на самом деле.
Если вы хотите летать на нормальных 3Д моделях, а не на китайских одноразовых игрушках, то вы попали в правильное место! Но сначала нужно узнать несколько фактов-аксиом этого хобби.
Сначала кратко о нескольких фактах:
В ертолеты - это долго, сложно и дорого. И чем дальше в лес (глубже в хобби), тем толще нужен кошелек. 😃 На сегодняшний день сумма относительно
Итак, отписываюсь для отчёта. Решил я прошить свои регуляторы последней прошивкой. К счастью, в них уже зашит SimonK bootloader, и можно прошиваться по сервопроводу. USB ESC Linker-а у меня не было, поэтому собрал из arduino ArduinoUSBLinker. ОК, подключился, установил RapidFlash (у меня мак, поэтому не хотелось запускать винду для запуска BLHeli софтины).
Подключил, выбрал всё как положено в интерфейсе (COM port и ArduinoUSBLinker, master release, TGY прошивка), запустил прошивку. RapidFlash стирает старую и… зависает на writing. “Океееей”, думаю я. Если что, есть запасной ESC.
После нескольких неудачных попыток пришлось установить древнюю Java 6, ссылку на которую для мака ещё поискать надо, и запустил kkFlashTool. Запускаю прошивку оттуда. Начинает шить, но каждую секунду зависает с receiveMessage() timeout, ждёт, заливает ещё несколько байт и снова отваливается. В итоге минут за 10 он прошивает, но верификация так же не проходит. ОК, пытаюсь запустить двигателем с этим ESC, но не работает.
Я долго думал, почему же так происходит. Рабочей гипотезой были наводки на сигнальный кабель, цепь выходила достаточно длинной. Перепробовал кучу вариантов, в конце концов подцепился прямо к проводу на ESC, отрезав его от рамы. Но результат был тот же. Так же пробовал проишться из под виртуалки с виндой, в том числе из под BLHeli приложения. Нет.
Всем доброго времени суток!
Итак, все состоялось!! Мы построили и успешно выступили с нашим самолетом на Red Bull Flugtag, который проходил 27 ноября 2015 года в Дубае. Мы сделали второй по дистанции полет в истории проведения Flugtag, 71м!!! Многие скажут, что там учувствуют конструкции, которые не могут летать по определению, но наша команда сначала была нацелена на максимальную дистанцию. В моих предыдущих дневниках вы можете найти истории проектирования и постройки.
Итак, все по порядку:
Ну вот, свершилось, очень надеюсь что в следующий сезон влечу на бензине, электрички это -вещь !!! Но в свете последних событий с рублём( не будем о грустном) батарейки нынче денег стоят, а хочется летать, не просто приехать на взлетку с двумя батарейками, отлетать два полета по 7мин, и 1 час заряжаться в полном одиночестве, да и по ценнику выходит электро в размере 2.2м дороже бензина, по этому решено …-БЕНЗИН. !!! Хотя MXS никогда не продам !!! А вдруг торкнет, а я думаю что да, да многие могут сказать, что бензинка глохнет и т.д, Но мы каккнить с этим решим вопрос !!! Пока идет медленная сборка и подгонка, мотор и т.д. Пришлось укоротить моторамму на 12 мм, слишком далеко хаб высовывался, а как Сказал Туполев, не красивые самолеты и летают так же( может переврал чуть чуть, но суть та же).
Гоняться за машинами по льду на коптере, психологически проще, чем за лодками по воде.
В первый весенний день ЮроПлан выбрался на подлеты, не сразу полетел.😁

Пациент - серва SavoxSC1257TG. Ее пиковое потребление - около 10.5А ( на голове их три штуки ). Эти пики - очень маленькие, тем не менее, учитывая то, что мне непонятно, что имеют в виду производители, указывая пиковый ток для свих беков в 15А, я решил подстраховаться.
Также используется бек Gryphon Polaris.
*Сразу хочу оговориться, это не руководство «Как нужно ремонтировать АКБ»! Это всего лишь описание того, с чем я столкнулся при ремонте аккумуляторов LiPo.
Решил перебрать два неисправных аккумулятора. Проблема заключалось в том, что на каждом из аккумуляторов не держала заряд одна из 4-х банок.
На фото видно проседание напруги на 3-м элементе.

На трубку 16х14 мм.
Можно ставить движки размером до 46 мм диаметром.
Все Т-мотор до 40-ой серии.

Не откладывая в долгий ящик решил продолжить с видео по замене подшипников в моторах на примере таранов 2204
Осилив около 200 страниц форума в ожидании аппарата озадачился а что же мне еще к нему бы прикупить - вот кратко :
1.Сам чирик .
2. Сразу сделал шасси на 3D принтере.
3. Радиоуправление Radiolink AT9.
4. MinimOSD - 2015 1set On-Screen Display OSD Board MinimOSD APM Telemetry to APM2.0 APM2.5 APM C1Hot New Arrival.
5. Передатчик - Boscam TS5828 RC FPV Mini 5.8Ghz 600mW 32 Channels .
6. Новый комплект GPS+компас - Beitian BN-880 Flight Control GPS Module Dual Module Compass With Cable .
7. Крепление монитора - High Quality Glass Fiber FPV Monitor Mount Holder/Display Mounting Bracket for Transmitter
8. Пропеллеры карбон - Gemfan 9047 Carbon Nylon CW/CCW Propeller For DJI RC Multirotor
9. Монитор с 2 приемниками и питанием - Eachine LCD5802S 5.8G 32CH 7 Inch Diversity Receiver Monitor With Build-in Receiver Battery - передумал заказал по совету колег с форума - Skyzone SKY-700D
10. Подвес Walkera G-2D
11. Кабель переходник Gopro - передатчик
12. 2 аккумулятора - 11.1 В 5200 мАч Walkera QRX350 PRO
Это опять кольца для ночных (и дневных) коптерных гонок.
Сделаны из пластиковой трубы D=20мм, двух тройников, 2х клипс 20мм и 2х - 16мм, хула-хупа и LED-ленты. 2м труба нарезана на кусочки 28см (4 шт) для ног подставки и 45 см (2шт) для пилонов. Клипсы на 20 и 16 мм скручены винтом между собой через дырочку (и прокладку из чорной изолеты, чтобы не прокручивались) и соединяют кольцо и пилоны. Чтобы трубу можно было впихнуть в тройник, я нагрел ее кончик в течении 30 сек строительным феном на максимальной мощности и вращательными движениями вкрутил в тройник и вытащил обратно. Лишняя пластмасса скаталась, затем охладил трубу под водой и намотал один слой чорной изоленты на ее кончик чтобы она прочнее фиксировалась в тройнике.
Вес изделия без батарейки 620г.
Стоит довольно прочно, узлы не люфтят. 😒
Можно на разных пилонах менять высоту клипсы, компенсируя неровности рельефа.
Модель просто супер… Хотел бы такую 😃
Но аппа не по феншую 😃
Ребят, сгорел зарядник, вышел из строя маленький транзистор, так как схемы отсутствуют установить тип не удалось, нужна помощь
Потребовалось проверить прошивку на Hitec Optic6.
Найти ни чего не смог, но помогли друзья.
Прошивка оказалась рабочей. Вот файлик.
Скоро, здесь будет что то написано…)
Давно ничего не писал в дневник, а еще воообще давно, тоесть НИ РАЗУ за свой долгий модельный опыт не делал видеообзоров 😃 вообще ни разу!!! 😃
Ну в общем решил потренироваться, первый блин на ваш суд 😃
Честный видеообзор моторов
TAROT 2204-2300 для мелких гоночных и не очень квадриков
Путешествуя по Швеции, провел денек в шведском городке Arvika. Потом отправился в другой город Karlsad, который знаменит тем, что в нем находится самый уродливый памятник в Европе (Goddess of Peace).
Спасибо AlcoNaft43 и его семье, что возили меня там!
Мне повезло, что в вечер нашего приезда там был, похоже, выпусной вечер, и уже бывшие школьники вовсю развлекались традиционным для этого города способом.
Нет, не таким 😁
Знакомый сделал фото из самолета на нашу улицу. Если присмотрется можно увидить квадрат с высокими деревьями, это улица Аэропорт. Левее нее видно 2 футбольных поля. На одном из них я упражняюсь в пилотаже.
Ссылка на альбомчик в фейсбуке. www.facebook.com/photo.php?fbid=1518218825160163&s…
Попробовал впервые погонять на парковке, насмотревшись таких гонок.
Гонки проходили в ословском Научном парке, типа нашего Слоково.
Сделал много кругов, поначалу задевая за землю - трудно чувствовать высоту. Должен помочь фонарик, направленный чуть вниз - по диаметру пятна легко определить высоту коптера.
Даже слетал на нижний ярус, управление добивало нормально, но на видео, конечно, были помехи.
Снаружи все как-то не-бодро :wacko:
dev.rcopen.com/forum/f6/topic120757/3290
Закончили основные фичи конвертора постов, теперь можно лазать по всему форуму и смотреть что получилось. Хотя все выглядит правдоподобно, вариант слегка ознакомительный:
- видео vimeo не обработалось (из-за ограничений на частоту запросов)
- смайлики не настроили (всейчас все заменены на один и тот же)
- местами парсер подкрутить надо
- пока все еще нельзя залогиниться
В общем, кто хочет - смотрите, делитесь впечатлениями о постах. Остатки в скором времени дополируем.
Давеча на одном сайте повстречался мне обзор автомобильного монитора. Монитор конечно посредственный 5 дюймов 800*480. Но автор показал внутрянку монитора! беглое гугление на контроллер дало даташит и кучу примеров от братьев с поднебесной. Тут то глаза и заблестели , руки зачесались … чувствовалось покалывание шила в одной точке . моник немедля был заказан с али.
Решил не вводить для этого проекта цифровую нумерацию.
Самолётик сей - перманентный эксперимент.
Хотелка - построить небольшой (относительно небольшой) мотопланер c размахом менее трёх метров.
Ну и естественно так, чтобы сел в кресло, взял в руки бокал вина, усадил на колени кошку чет не туда понесло 😉)
Дело в том, что мне не на чем летать сейчас 5J.
😃)
Что будет полюбасу.