New entries

Квадрик Tyrant 215, камера без подвеса Mini Mobius
Эта запись не претендует на ноу хау или на что-то экстраординарное… это просто попытки применить 3D принтер в построении коптера.
Я так подумал, раз уже соорудил себе принтер, то наверно, можно отказаться от токарных и фрезерных работ в изготовлении деталей коптера.
Пластиковые детали получаются легче, чем текстолитовые. Очень удобно переделывать, вносить изменения в чертеж детали и опять «печатать».
Форму можно создать практически любую! И еще, в такой технологии большой плюс - повторяемость конструкции.
Главная идея — «печать» деталей под конкретные комплектующие. То есть, чтобы у каждого блока было свое место.
Стараюсь облегчить все свои коптеры, и профиль лучей не исключение. Правда перепробовал много разных свёрел, любят они ослаблять конструкцию при сверлении, как бы отверстие даже больше диаметра сверла становится, при этом заминая сам металл. Выход нашел не сразу, на фото есть, сверло по дереву на 6мм, отверстия ровные получаются, профиль 10х1мм 165мм длиной, вес до и после сверления, на одну треть вес уменьшен, на весь коптер экономия 20гр, а сверлить или нет, вам решать друзья!
Работа с металлом затягивает. Особливо когда всё сходится, тика в тику.
Допуски располовинивал, от ГОСТ-овских, однако.
36 минут, и готовчики. Боковины.

Подсобрал железки, погонял каретки. Всё бегает, ничего не подтирает, усилия ровные …
Расчистил место в стеллажах. И отправил корни пускать, значится. До марта. 60 килограммов корней 😃)
Доделали на странице поиска по форуму почти все, кроме докачки при перемотке вниз и пары мелочей. Проверьте пожалуйста, нормально ли ищет и удобно ли показывает результаты.
Если замечаний и пожеланий не будет, то примерно такое и пойдет в релиз.
PS. Поиск по разделу и поиск по теме привернем на днях, это будут отдельные страницы
Пришли на пробу парочка новомодных антенн типа “Пагода”.
Правильно произносить “пАгода”, то есть по названию типа восточных многоярусных культовых башен и жилых построек, со своеобразными ярусными кровлями и карнизами.
Одна из антенн правой круговой поляризации RHCP, а вторая - с левой LHCP.
Обе антенны были с разъёмами типа обычный SMA папа.
Для прямой работы между собой они не годятся, так как не парные по типу поляризации.
Хотя, если одну из антенн на приёме использовать например через оффсетное или прямофокусное зеркало (рефлектор), то получится корректная пара с дополнительным КУ (коэффициентом усиления). Хотя по шарообразной ДН, такое применение и не будет оптимальным.
Народный ЧПУ - MPCNC (Mostly Printed CNC) - часть 1 (Механика)
С электроникой в этом станке не сложно.
Большинство не использует концевых выключателей. Видимо, в силу его универсальности, толку от концевиков не много. Я их купил, но ставить пока не буду. Однако, при настройке станка хорошо иметь возможность экстренно обесточить силовую часть.
Для управления моторами использую RAMPS 1.4 на плате Arduino Mega с прошивкой Marlin (про софт отдельно скажу в третьей части).
Заряди мобилу от ЛиПо, самодельный PowerBank и китайские сопли! Смотри, делись, подпишись!
С вечера приготовил управляющие программы, а с обеда, отдав должное работе, приступил.
Сегодня на столе станка умостился фундамент оси Z.
Наушники на уши, компрессор ВКЛ, сож и пошла жара …
Местами потаи глубокие - 11 мм.
Разметка отверстий, сверловка и вот она, прелесссть …
СПб_Суздальский в телеграме:t.me/joinchat/AAAAAAp8qwnl1F_jxguBCw
from Arkady68 :
post direct link
…Тогда я прописал в SR параметры все нули, а потом через сетап активировал ОСД (OSD). И о чудо, все заработало!
15кВт, 24000об/мин, автосмена с конусом HSK63, водянка, новый с хранения 😎

хз пока куда его, толи новый станок буду собирать, толи текущий глубоко модернизировать.
С утра отформовав очередной плановый фюзик Плексара, начал работать с железками.
Фундамент Z с пятницы у шлифовальщиков. А вот фундамент шпинделя в шлифовке не нуждается, т.к. деталь маленькая и в размер.
На текущем станке прошёлся центровкой и отфрезеровал потаи.
Отверстия уже на сверлильном, ручками.
После центровки не хуже полутора-двух десяток, если ручками сверлить, по моему опыту. Бывает и точно в размер (межосевые).
Давайте, мочите, аксакалы, что я там не отмыл, и не тем способом припаял? 😃
Коллеги,
предлагаю обсудить алгоритм действий по спасению коптера от улета в сильный ветер, который позволит без промедления предпринять правильные действия и найти коптер штатными средствами, без трекеров и маяков на борту.
В основу размышлений взят вот этот случай с нашим форумчанином во Франции в прошлом году:
Это не чтоб похвастаться, просто попросили поделиться чертежами. Давно это уже было, в 2010году.
Мотор вертолетный 2800kv 2S 6x4. Было видео, но потерялось. Модель делалась с целью получить максимальный диапазон скорости от минимальной до максимальной (для простоты использования не очень продвинутым пилотом).
Давно уже было желание иметь осциллограф. Не то, чтобы очень нужно, но иногда не помешает да и просто хочется.😃 Хороший стационарный ни к чему, да и дорого, а собранный из пары деталюшек и подключенный в аудиокарту компа неудобен. И вот в октябре прилетает рекламка с Банггуда с приятным таким наборчиком типа “сделай сам” за вполне вменяемую цену в $28,79.
Orignal JYE Tech DS0150 15001K DSO-SHELL DIY Digital Oscilloscope Kit With Housing
Подождал до “черной пятницы” 11.11, еще малость цену скинули и поборов зеленое животное я его купил.😃 Доехало достаточно быстро, даже с учетом “пятницы”.
Вдруг кто не знает 😃
Что и для чего мы создаем.
История вопроса.
На рынке существует 2 вида FPV гарнитур:
- FPV видеоочки.
- FPV шлемы.
FPV видеоочки обеспечивают комфортный угол обзора (FOV) виртуального экрана 30°…50° по диагонали, но дороги в производстве, так как используются дорогостоящие микро-дисплеи. К тому же FPV видеоочки имеют недостаток оптической схемы в виде хроматических аберраций и размытия по краям изображения.
FPV шлемы напротив, в производстве обходятся недорого, так как строятся с использованием массовой дешевой элементной базы – 5’’ дисплеях и линзах френеля, но имеют очень большой FOV – более 70°, что не комфортно для восприятия пользователем.
Появляются шлемы с комфортным FOV, но это достигается максимальным удалением экрана от глаз пользователя. Габариты такого шлема становятся большими и неудобными для использования.
Давненько я сюда ничего не постил. 😎
Правда у меня и хобби сейчас немного поменялось, так как сменил вертолетики на колесики, но об этом тут не в тему писать. Ну а видосиком думаю ничего зазорного не будет поделиться. 😃
Сразу скажу, меня в кино нет. Только моя поделка, которая все еще строится. Ну а кому будет интересно, под видосом на трубе ссылка на мой бортжурнал есть.
Уменьшен мидель фюзеляжа под размер батарей. Крыло на пилоне над фюзеляжем. Получился парасоль с уменьшенным влиянием фюзеляжа на крыло (см. изображения из XFLR5). Взлет с руки, посадка на брюхо. Вся эта тема затевалась под трех-осевой подвес для Мебиуса.

Станки должны делать другие станки! (с).
Проект в прогрессе.
Петрович (матёрый фрезеровщик старой школы) расстарался. Вывел заготовки в сотку, в плане.
По звонку у него явился самолично и принял непосредственное участие в работах. Таки нахватался, по мелочи, работе с металлом.
Итогом, детали оси Z.
По запросу HC-06 и сортировке по возрастанию цены на ебеях в первых пунктах (а значит в самых дешёвых) выпадает вот такой модуль.
Заказал ради интереса. На тот момент стоили в два раза дешевле “оригинала”.
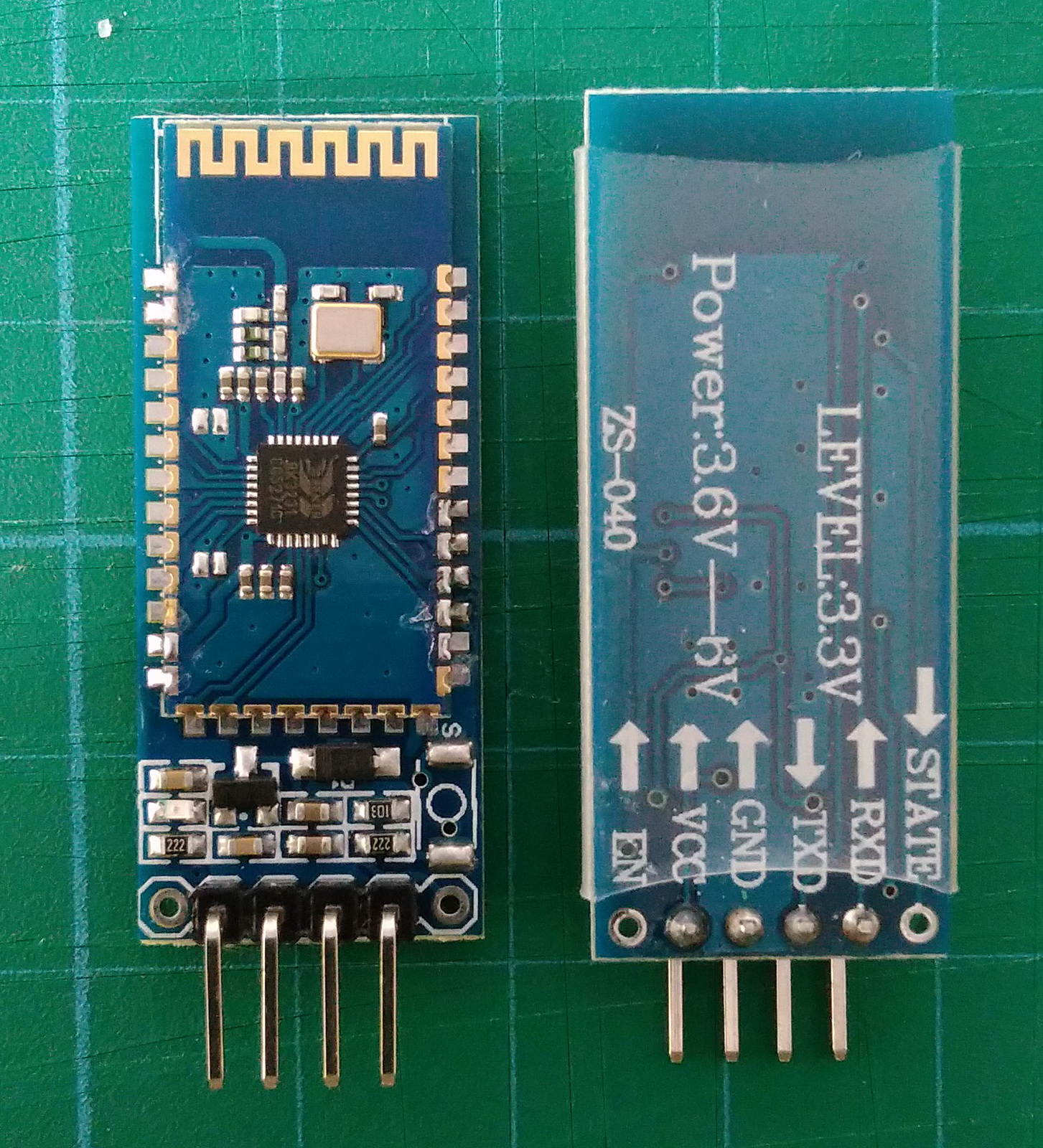
По радио модуль видится и подключается. Опознаётся как BT-04A, пин 1234.
Однако в одном терминале ни на одной скорости на AT он не отзывался.
Удалось достучаться до модуля только из монитора порта Arduino IDE, выбрав внизу “Оба NL & CR” по скорости 9600.
Вот такая прошивка на модуле.
Многомоторная фантазия / Hercules C-130. Подробности сборки здесь.
Сваял небольшое видео с кратким обзором использования режимов Follow Me и Magic Drone
Решил проверить дальность, улетел на 1,9 км. Все в стоке, без модов. Наверное можно было и двушку дожать, но стая ворон кружащая вокруг явно намекала что пора сваливать 😃
Помогите что я сделал не так? APM прошил, через визард все настроил, отколебровал, модуль питания к АПМ тоже параметры задал, делаю арминг, двежки крутяться, пару, тройку сиунд потом глохнуть. Помогите. пишите пожалуйста в личку. огромное спасибо
Еще с самого первого полета на только что распакованном DJI Phantom 3 Advanced заметил, что вроде как стик управления жмешь ровно прямо, а сам коптер летит как то прямо и немного в бок откланяется (в право). что за хня, подумал я и к ребятам на форум… говорят что так у всех… фигово - подумал я, на втором фантоме такого не наблюдалось! в целом - думаю чт окогда одним пальцем управляешь стиком то он волей не волей идет не совсем прямо - если взяться за стик кончиками двух пальце у основания и легонько вести его вперед то он худо- бедно но таки летит вперед!
Запряг помогать друзей, сил потратили немерено, очень старались рассказать без лишних слов и только по делу.
Надеюсь вам понравится. С удовольствием приму идеи и замечания.
Опять что-то не вставить видео с превью епрст:-)
“У каждой хозяйки свои поварёшки”
(с) Борщ из свеклы. Книга рецептов.
Уже традиционно приоткрываю “тайны кухонные”. Которые вовсе и не тайны даже 😃)
Но ведь любопытно, а что там внутри?
Заходьте, присаживайтесь, не люблю опами в мастерской толкаться …
В этот раз я занялся очередной оптимизацией состава материала в ламинате фюзика.
Цель, при том же малом весе получить бОльшую жёсткость и сократить время закладки.
Quantum 4120: 8 магнитов, 12 лучей обмотки (290 гр, 1200 kV, 1780 Вт)
Aligh RCM-BL600MX: 10 pole, 12 лучей обмотки (340 гр, 510 kV, 3300 Вт).
___________________________________________________________________
Motor Timing deg опережение (зажигание): 360/количество лучей обмотки мотора =Х, затем вычисляем Х/7 - меньшее, а Х/5 - наибольшее значение тайминга.
Quantu 4120: 360/12=30, (30/7= 4,3…30/5=6,0)= 4…6 (форум 5).
RCM-BL600MX: 360/12=30 (30/7=4,3…30/5=6,0) = 4…6 (форум 5-18).
____________________________________________________________________
set PWM Rate частота включения = Kw мотора*вольтаж мотора*количество магнитов мотора/20. (1S = 3,7 V).
Впервые в жизни попробовал дайвануть на коптере 😃
страшно… 😃
Случайно бродивши по интернету обратил внимание на запчасти от шуруповерта
Стоит где то 150 гривен (6$)
Купил и вот что получилось с него поиметь
Полноценный планетарный редуктор на две ступени.
P.S. Обычно продается без самой малой шестеренки которая идет на вал мотора но она отдельно стоит около 15 гривен (0.5$)
Завелась балалайка. У меня до последнего момента знатно пригорало - думал что есть серьезные баги в поисковом движке. К счастью, оказалось что основные баги были у нас. Мне даже нравится что теперь показывает.
Большая просьба ко всем - попробуйте там понабирать, что вы обычно ищете, и напишите, похожи результаты на правду или нет. Хочется чтобы надобность в гугле для поиска по сайту совсем отпала. Сам я поиском особо не пользуюсь, поэтому нужна помощь зала.
Интерфейс конечно пока не доделан, но результаты должны быть верными. На следующей неделе будем добивать красивости. Ну и релевантность покручу, если напишете куды копать.
UPD. Подкрутил стили, поправил для мобилок, сделал чтобы раскрытая форма запоминалась, и чтобы при смене фильтра результаты сами обновлялись. На той неделе еще с дизайнером посидим, подумаем.
Проверка но жёсткость ложемента показала, что её с лихвой.
Тактильно - примерно как стеклотекстолит 2.5 мм на изгиб.
За-гла-за.
Ложемет в фюзеляж будет вклеиваться на кашке, но только после проброса боуденов.
Предварительная балансировка показывает, что в текущей конфигурации с батарейкой 2S центровка без балласта 72 мм от ПК.
Эта балансировка была получена при подгрузке хвоста 20-ти граммовым грузиком.
Места на ложементе свободного много. Можно и батарейку подвигать, отлавливая центровку, и после полного устаканивания подрезать колпак, в размер.
Гуд!
Хорош трындеть, скажет читатель. Ты пальцем покаж! (и будет прав, кстати :0)
Показую.
Вариант размещения сервушек качалками вниз.
Сразу предупреждаю, это даже не бета-версия. Она нормально не ищет, и там до фига не доделано. Чтобы проверить - введите какую-нибудь цифру.
Есть пара вопросов к телезрителям:
- Нормальная ли форма поиска, или чего-то еще не хватает?
- Достаточно ли того, что показывается в результатах поиска, или надо что-то еще и как-то иначе?
- Сейчас сортировка по времени для тем использует дату обновления. Это ок или надо дату создания или и то и другое? Если и то и другое - обоснуйте пожалуйста, не хочу интерфейс усложнять.
Долго думал об идее своего настольного станка чпу.
И вот как-то наткнулся на сайт
Решил запилить распаковку, ну а вдруг еще есть тормоззза, которые не видели?! 😃))
Вещь афигенная, год назад я и мечтать о таком дрончике не мог, фантом-унылая табуретка никогда меня не прельщал именно благодаря своему табуреточному форм фактору, а тут…
Короче DJI Mavic FLY MORE COMBO
regulation.gov.ru/projects#npa=60129
Интересно всё же с кем мы соревнуемся… я создал три акаунта и три раза проголосовал против заняло это минут 10…, но видимо на их стороне админ…
А пытаться выиграть у напёрсточников честными способами бесполезно, а вот если каждый проголосует по три раза!!! То шанс есть!!!
Сегодня крайний день! Поднавалимся мужики!!! Просто хотя бы ради спортивного интереса!!!
Да! И пожалуйста! Максимальный репост!!!
Почему “почти” опишу ниже, пусть будет маленькая интрига 😃
Note1: “На вкус и цвет все фломастеры разные”, поэтому помимо своего решения в конце пОста опишу альтернативное решение форумчанина AlexZh, которое наверняка многим придется по вкусу.
Note2: Все описанное в данном сообщении делается на свой страх и риск, никакой ответственности (даже моральной) автор не несет.
Копирование видео на флешку, подключенную напрямую к дрону, так же возможна запись сразу на внешнюю флешку. Описание на русском здесь rcopen.com/forum/f135/topic444188/588
Оригинал здесь
Начитавшись наших и забугорных форумов решил свести воедино план предполетной подготовки для Bebop 2 для минимизации вероятности крашей и улетов на родину “Flyaway” (Франция или Китай в данном случае не важно:)).
Перед каждым полетом:
- На смартфоне (планшете) отключить Bluetooth, Wifi (если используется SC) и мобильный интернет (mobile data, если рулите смартфоном на Android),
- Выполнить Flat trim и калибровку компаса (судя по всему Flat trim проще проводить дома на столе),
- Убедится что получен GPS fix дрона и контроллера (смартфона) и по карте проверить что он соответствует действительности,
- Убедится что батареи дрона, контроллера и смартфона заряжены,
- Убедится что в зоне полетов нет препятствий выше установленной высоты RTH,
- Откорректировать максимальную дальность и высоту полетов в соответствии с планируемым полетом, убедится что установлен режим Geofence,
- Протереть объектив мягкой тряпочкой,
- Убедится что альтернативные системы поиска дрона включены и работают,
- Включить запись экрана на смартфоне,