MultiWii

pereimenuyte *.ino v *.pde i vse skompilitsya v arduino-0022
на плате резистор удалить надо, я об этом писал где то, поищите
на плате резистор удалить надо, я об этом писал где то, поищите
Спасибо, помогло.
А подскажите если балки карбоновые от 450-ки использывать hobbyking.com/…/__17126__HK450_carbon_tail_boom_.h… вместо алюминиевых hobbyking.com/…/__11503__HK450V2_Tail_Boom_.html .Имеет смысл ,как они резонировать будут или нет,вроде как немножко легче и при ударе не гнутся??
они резонировать будут
Эти алюминиевые балки чуть толще фольги. Я использовал не обрезая. Короче ничего хорошего. Потом перешел на карбон. Разница большая.
А вот если падать\жестко садиться. Аллюминий согнется однозначно, карбон может еще и выдержит не сильный удар.
Вот как раз по вашему примеру решил делать раму.Квадраты алюминиевые меня не устраивают своим огромным по нашим меркам весом 😃 да и как-то не очень красиво.Все тогда беру карбон.
Может кому пригодится скидочка
www.hobbyking.com/buddy.asp?code=07D59091-D512-471…
www.hobbyking.com/buddy.asp?code=A6B9F649-1F93-4FB…
www.hobbyking.com/buddy.asp?code=3D622362-72FF-4CE…
Кто то пользует “Android MultiWii Configuration” ?
market.android.com/details?id=net.xrotor.andmultiw…
Есть какие то особенности кроме указанных здесь www.blueskyrc.com/index.php?main_page=product_info…
Conenction to the MWC:
MWC - BT
-----------------
GND -> GND
VCC -> 5V(VCC)
RXI -> TX
TXO -> RX
ЗЫ
У Ардуино Нано почему то пины называются RXO и TXI
pereimenuyte *.ino v *.pde
Спасибо.Если не затруднит,можно немного по подробней какой именно файл с таким разрешением надо переименовать?
Разобрался.Признаться пытался найти файл с таким разрешением в системных файлах ардуины,а оказалось надо было искать в самой прошивке.
Кстати странно,почему новая версия Ардуины не компилирует 1.9дев прошивку ссылаясь на ошибку в коде,а 1.8-1.9 ссылаясь на ошибку системных файлов самого компилятора.
почему новая версия Ардуины не компилирует 1.9дев прошивку
proveril v novoy versii… u menya vse skompililos’
Здравствуйте нашел у себя в загашнике com портовый GPS модуль для кпк можно ли его подключить к вию.
Господа, не затруднит вас помочь с распознанием и в итоге подсказки как сие изделие подключить,
нун чак с маркировкой WII-2088 V2.1
фоты в качве можно видеть тут
www.rcgroups.com/forums/showthread.php?t=1437001
заранее спасибо за уделенное время
или устранить изделие методом утилизации в виду неприменимости?
Не подскажите как распологать:
RU-IMU-9+1 v1.0
gapey.narod2.ru
А то непонятно где перед… =(
Господа, не затруднит вас помочь с распознанием и в итоге подсказки как сие изделие подключить
rcopen.com/forum/f123/topic246336
Не подскажите как распологать:
RU-IMU-9+1 v1.0
gapey.narod2.ru
А то непонятно где перед… =(
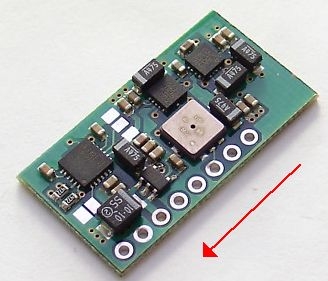
ну, судя по микросхеме гироскопов то как на фотке так и распологать
Поставил как раз так же, но чё то с этой платой коптер начало закручивать по yaw, вот и думаю может не так всё таки ставить нужно?
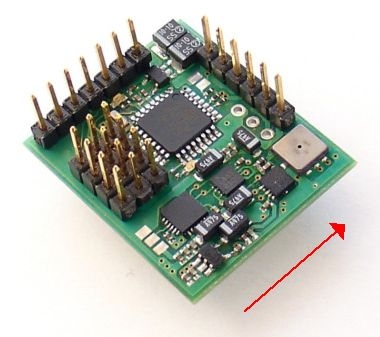
ставить как и оригинальную FFIMU 1.22L разЪёмами назад …
вовсяком случае на пирате и ранних Wii так … последние сборки Wii непробовал …
а ваапче код можно под любой вариант установки поправить …
ставить как и оригинальную FFIMU 1.22L разЪёмами назад …
вовсяком случае на пирате и ранних Wii так … последние сборки Wii непробовал …
а ваапче код можно под любой вариант установки поправить …
очень странно )
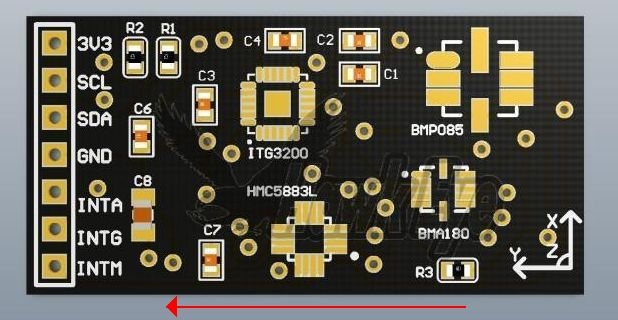
по даташиту микросхема компаса установлена не правильно (ее требуется развернуть на 90 градусов против часовой стрелки), а микрухи акселя с гирами расположены таким образом, что разъем у платы должен быть слева
вы летали вообще на данной схеме, точнее проверяли ее без вмешательства в код программы?
нет, я не собираюсь опровергнуть работоспособность данного изделия, но все же привык доверять даташиту производителя…
вы какой тип платы датчиков выбрали ???
если алливан то оно работать небудет … там чипы (оси) подругому взаиморасположены …
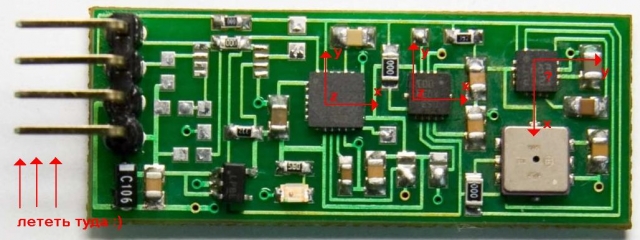
если просто выбрали чипы датчиков то нужно смотреть по графикам чтобы колебания совпадали с перемещением платы , возможно придется править код (менять местами/инвертировать оси на какихто датчиках) …
плата делеласЪ из проекта FFIMU 1.22 с сохранением ориентации чипов , поскольку на тот момент FFIMU 1.22 активно продавалась и поддерживаласЪ всеми популярными проектами … для этого в проекте достаточно раскоментировать соответствующий дефайн …
также взаимная ориентация чипов совпадает с проектом аэроквад …
ща перепроверил ориентацию с тем что было готового в ноуте …
в мегапирате старом (В8) на котором тестирую платы , разЪемами взад , поэтому и написал так попамяти … в Мультивиае 1,8 при выборе FFIMUv2 действительно боком как на картинке …
значит разработчики FFIMU накасячили с ориентацией чипов, а вы подхватили ее, ну и мультивии, мегапират решили не запариваться, прописали как есть 😃
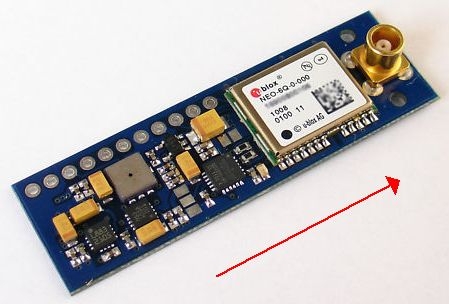
последующие разработки все с правильной ориентацией идут
Поставил как раз так же, но чё то с этой платой коптер начало закручивать по yaw, вот и думаю может не так всё таки ставить нужно?
попробуйте в конфиге не выбирать FFIMU, а каждый датчик по отдельности расскоментируйте, кроме компаса
ну у аэроквада тогда тоже накосячили с ориентацией компаса …
вообще обозначение осей весьма условно … просто я брал за основу самую ходовую на тот момент плату …
вообще есть идея слелать плату 50х50 сразу с 328 мегой под максимально возможное количество разных датчиков , втомчисле аналоговых и с возможностью установки вместо кварца внешнего генератора (для оверклокинга меги) …
получится плата под виайнай код , заодно заготовка под разработку двухядерного проекта на AVR …
лучше сделайте платку под бюджетные датчики которые можно переставить с чаков и виимоушин
с условием одностороннего монтажа и одностороннего текстолита
думаю будет пользоваться огромным успехом так как все детали идут в комплекте (кроме меги и ее обвязки соответственно, которую так же можно взять с ARDUINO Pro Mini), плюс никаких заморочек с металлизацией отверстий, дешевизна, присутствие автоуровня, а все остальные датчики нафик не нужны
данный комплект и создание контроллера обойдется примерно 1300 рублей, а то и меньше, но это будет то что доктор прописал )
и не надо отписываться про галимость этих датчиков, у меня коптер летает/зависает на 5 с плюсом
на вимоушен обычно стоят 3205 изза которого плату похорошему нужно делать по 4 классу …
на чаках аналоговые датчики которые сЪедают 3 ноги АЦП на меге что тоже негуд …
если делать одностороннюю плату то слишком дохрена перемычек будет … нужен какминимум земляной полигон на обороте …а это по цене выходит тоже что и двухсторонняя … ставить этажеркой промини невижу смысла , проще мегу с кварцем припаять …
такчто делать просто монтажку и шилд с датчиками под промини точно небуду …
если буду делать как задумал , то датчики с моушенов (3205) точно можно будет ставить … может даже разведу под 500/650-е инвенсенсы , но тогда точно придется суммарный сигнал с приемника подавать … аксели точно будут бошевские ,АДшки и аналоговые (разные) с чаков … компасы только 5883 , бары 085 и 5611 … те напаивать можно будет то что есть в наличии … также если влезет можно сразу FT232RL поставить и/или на обратной стороне предусмотреть блютузный модуль …
дальше если вместо кварца поставить генератор на 24 мгц ато и на все 32 (новые меги по имеющейся информации гонятся до 40 с лишним) то получим существенный прирост в скорости обработки данных с датчиков …
дальше подпаиваемся на выводы SPI меги и цепляемся к 2560 ардуине , которая уже рулит моторами и прочим , таким образом еще сильнее разгружаем мелкую мегу …