MultiWii

И как ты проверяешь что калибровка слетела?
кручу коптер, а стрелка непойми как крутиться, хотя до перепрошивки нормально крутилась и так каждай раз… сегодня миксы настраивал для специфичной рамы - чуть с ума не сошел =) в итоге атмега затупила и коптер вообще перестал летать… может и правда дохлая уже
кстатии о компасе - это нормально что калибровка постоянно слетает после заливки новой прошивки? т.е. все параметры норм, а компас калибровать приходиться… да еще и ощущение что иногда он просто сам по себе скидывается, даже без перепрошивки
Аналогичная проблема.ИМХО это баг самого чипа НМС5883. На другом LSM303 такого явления уже нет.
Проверте внимательно знаки осей, оссобенно при переходе на 2.0 и выше… ятожеступил сперва и начинал грешитьна компас…
не, знаки осей 100% нормальные, проверял по поведению… есть ощущение что у меня всетаки атмега тупит… сегодня несколько раз взлетел нормально (насколько это может быть нормально при необычной раме и микс-экспериментах), потом просто начал брыкаться из стороны в сторы, пока набросился на меня, решил что пора остановиться и поставил обратно на полку =) Завтра соберу на 328p с itg3025+adxl345
кстатии где то тут видел что вот такой
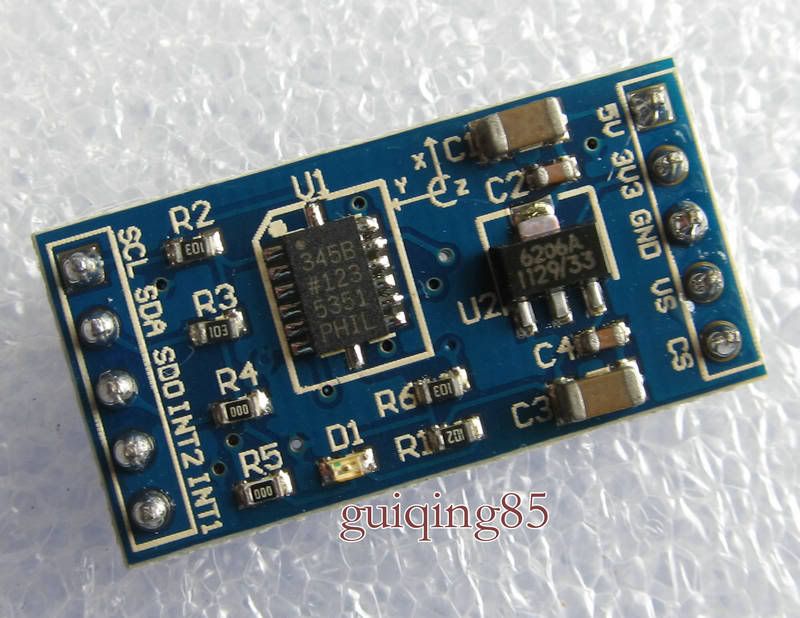
сенсор как то хитро надо цеплять… не подскажите что именно с ним не так (еще не подключал) и как поправить, если это надо
и даже и лучше code.google.com/p/i2c-gps-nav...s.rar&can=2&q= т.е. 115200 и 10hz
Александр, спасибо большое, но я искал именно 38400 5Гц… весь гугл перерыл, нету 😦 Вдруг где попадалась именно такая прошивка? Спасибо!
сенсор как то хитро надо цеплять…
rcopen.com/blogs/91496/12370
…googlecode.com/…/5 Connection diagram ADXL345 & B… LLC не обязателен
кстатии где то тут видел что вот такой
сенсор как то хитро надо цеплять… не подскажите что именно с ним не так (еще не подключал) и как поправить, если это надо
вроде как перемычку r4 выпаивают
не, знаки осей 100% нормальные, проверял по поведению…
мне тоже сперва казалось что со знаками компаса все ок… дело в том что после калибровки можно не понять полярности… очисти еепром и без калибровки компаса проверь его знаки еще разок… дома посмотрю, но вроде как получлось Z с минусом не смотря на то что чип вверх смотрит…
очисти еепром и без калибровки компаса проверь его знаки еще разок…
А как очистить еепром? Чесно не знаю как это сделать.
вроде как перемычку r4 выпаивают
убрал перемычку и подпаял SDA SCL GND 5V + надо сменить адрес акселя на 0xA6
работает нормально, пойду раму в обычную гексу переделывать =)
убрал перемычку и подпаял SDA SCL GND 5V + надо сменить адрес акселя на 0xA6
работает нормально, пойду раму в обычную гексу переделывать =)
ну это уже танцы с бубном , там на этой плате я не помню куда запаяна нога CS, на землю или на + , она отвечает за адрес, я себе разводил платку отдельно так чтоб все сразу работало без ковыряний в коде. Аксель себе кстати снял с такой платы как раз.
З.Ы.
Посмотрел плату, CS на VCC, получается вот так
#define ADXL345_ADDRESS 0x3A
авдруг)
мот в этом дело
Не за спину не залетал.А вот кратковременый фэйл-сейв мог произойти,на этом поле туева хуча помех.
Саш как думаешь,можно замедлить отключение “headfree” на 0.5-1 сек?
А может лучше в фэйл-сейв прописать “headfree” на включеный “headfree” ?
ну это уже танцы с бубном
мне проще в коде поменять, чем лишнюю перемычку делать =)
мне проще в коде поменять, чем лишнюю перемычку делать =)
я конечно в этом не шарю совсем но меня это ввело немного в ступор
I2C adress: 0x3A (8bit) 0x1D (7bit)
// Resolution: 10bit (Full range - 14bit, but this is autoscaling 10bit ADC to the range ± 16g)
// principle:
// 1) CS PIN must be linked to VCC to select the I2C mode
// 2) SD0 PIN must be linked to VCC to select the right I2C adress
// 3) bit b00000100 must be set on register 0x2D to read data (only once at the initialization)
// 4) bits b00001011 must be set on register 0x31 to select the data format (only once at the initialization)
какие-то разрешения и т.д, так что сделал что б все было по дефолту, и я там наплел, не cs на vcc, оно и так на нем должно быть, еще и sdo )
CS PIN must be linked to VCC to select the I2C mode
vcc это +3.3 или +5?
vcc это +3.3 или +5?
ну датчик вроде как 3,3 , я питаю от 3.3 стаба и LLC на pca9306, но там же на борту вроде стоит стаб… так что 3.3 если хочется получить из 5ти то тыкаем 5V на вход 5V , если уже есть чистый источник то в 3.3 вход, это вроде как линия в обход стаба идет напрямую
Не за спину не залетал.А вот кратковременый фэйл-сейв мог произойти,на этом поле туева хуча помех.
Саш как думаешь,можно замедлить отключение “headfree” на 0.5-1 сек?
надо посмотреть что там к чему… и да дело скорее всего в кратковременном пропадании сигнала с аппы и тогда нос в хеадфрии перезапоминается…
А может лучше в фэйл-сейв прописать “headfree” на включеный “headfree” ?
ну в качестве проверки наверное можно попробовать…
upd: так стоп! чуть не запутал меня 😃 НОС запоминается на арме движков а не на включении хеадфрии…
я так полагаю что у тебя:
- моторы армятся с тумблера
- ппмсумм шумит
т.е. при малейшей помехе у тебя происходит перезапуск движков… что глазом не заметно, но хватает для перезапоминания носа…
- если первое, убери арм с тумблера… старт моторов стиками более надежен, там как раз и стоит таймер-пауза…
if ( (rcData[YAW] > MAXCHECK || rcData[ROLL] > MAXCHECK) && rcData[PITCH] < MAXCHECK && armed == 0 && calibratingG == 0 && calibratedACC == 1) {
if (rcDelayCommand == 20) {
armed = 1;
headFreeModeHold = heading;
}
- убери наводки rcopen.com/forum/f123/topic264377/34
GPS: мне уже начнает нравится mtk3339 😃 нарвался на статейку… залил AGPS данные, после 3Д фикса моментом остальные спутники находит по базе…
hobby.msdatabase.ru/project-updates/…/studygps
- моторы армятся с тумблера 2. ппмсумм шумит
Я думал это только у меня такая болезнь на криусе, я про это уже писал.
У меня ARM на стике, ппмсумма нет. От прошивки не зависит.
При активном headfree в гуи видно что компас начинает вращаться при слете акс.
После перепотключения питания все опять ок.
Стоит v.33. RTH работает в принципе хорошо ( первый раз перепугал разворот коптера в сторону дома ), видео снимал но только с коптера , пойду летать сниму с земли.
ПИДы на ГПС крутили или на дефолтных отлично все?
Я думал это только у меня такая болезнь на криусе, я про это уже писал. У меня ARM на стике, ппмсумма нет. От прошивки не зависит.
и тоже самое? т.е. в хеадфри НОС теряет?
тогда даже не знаю куда копать…
При активном headfree в гуи видно что компас начинает вращаться при слете акс.
что значит при слете акселя? калибровки слетают?
з.ы. т.к. прошивки для mtk3339 не нашел (купился на новизну на свою голову ) чтобы получить 115200 и 10гц
На сайте у gtop-tech.com написано что можно заказать кастомную прошивку, но как я так и не понял.
Коллеги, поскольку прошивки с нужными параметрами мне найти не удалось (для 3329 есть 38400 1Гц и теперь 115200 10Гц, а нужно 38400 5Гц) - решил вчера вечером просто написать производителю, сегодня утром уже пришел ответ. Все просто, они просят выполнить команду $PMTK605*31 для определения текущей прошивки (видимо, что бы точно понять, что присылать) и спросили, нужно ли мне только увеличение baud rate и update rate, или что-то ещё (а я не знаю, что можно еще попросить…мне NMEA нужен, не бинарный, а так вроде больше просить нечего, но NMEA кмк там по умолчанию…)
Это я к чему - на сайте производителя есть форма обратной связи, пишите запрос в техподдержку, сразу сообщаете результат команды $PMTK605*31 и вам должны выслать прошивку с нужными параметрами по умолчанию. Очень надеюсь на их техподдержку, ведь в этих модулях PA6B нет возможности, как, например в Locosys20031, сохранять настройки по умолчанию во flash. Вот такие дела.
что значит при слете акселя? калибровки слетают?
Не правильно вырозился, нос теряет.
Пиды крутил немного. Приложил сриншут.
Коллеги, поскольку прошивки с нужными параметрами мне найти не удалось (для 3329 есть 38400 1Гц и теперь 115200 10Гц, а нужно 38400 5Гц) - решил вчера вечером просто написать
А куда писали не подскажите ?