MultiWii

??? Что-то мне сомнительно что это поможет …
Таки да, не поможет… Нужно повозиться с виброразвязкой платы, перед этим отключить баро. Особое внимание обратить на провода подходящие на плату (ESC, приемник), что бы они не сводили на нет все демпфирование… Ну и естественно балансировка ВМГ…
А как Вы определяете что отключили Баро?
Я думаю, что баро я отключил
Вот я и написал, что думаю:) Не уверен, что сделал правильно.
В GUI назначил включение - выключение в области серых квадратиков (на картинке по стрелке) на тумблер, но на полет это никак не отразилось (картинка не моя, из интернета).
Вообще то это был бы второй вопрос - я хоть и читаю все, что найду и понимаю, но вопросов еще много😵
Нужно повозиться с виброразвязкой платы, перед этим отключить баро.
С виброразвязкой и балансировкой повозился - правда, без фанатизма, но понятие об этом имею - навозился в свое время с вертолетными гироскопами и флайбарлесами:) Про провода в курсе.
Я вообще думал про улучшение виброразвязки, но это уже был бы экстрим, КК летал с худшей виброразвязкой…
Читал еще про отсечку вибраций на програмном уровне, но пока не понял, как это делать.
Руками поднимать/опускать не догадался - вечером первым делом попробую когда прийду домой.
P.S. Пропы карбоновые
КК летал с худшей виброразвязкой
На КУКе только гиры, там я вообще ничего не балансировал, и плата была привинчена к раме… Тем не менее летал вполне приемлемо…
Попробуй включить и подобрать фильтры гироскопа в конфиге:
IMPORTANT! Change low pass filter setting changes PID behaviour, so retune your PID’s after changing LPF.*/
//#define MPU6050_LPF_256HZ // This is the default setting, no need to uncomment, just for reference
//#define MPU6050_LPF_188HZ
//#define MPU6050_LPF_98HZ
#define MPU6050_LPF_42HZ
//#define MPU6050_LPF_20HZ
//#define MPU6050_LPF_10HZ
//#define MPU6050_LPF_5HZ // Use this only in extreme cases, rather change motors and/or props
Но опять таки, без хорошей виброразвязки и балансировки это может быть бесполезно…
Все думаю датчик от V-Bar прикрутить для тестирования вибраций - там и частота и амплитуда:)
Т.е. проблема скорее всего в вибрациях?
А баро я правильно отключил?
Подключал радио модули www.dfrobot.com/index.php?route=product/product&ke…

Заработало на 0 порту. Подключил rx-tx, tx-rx, gnd-gnd, vcc-5v
В программке конфигураторе к модулям, поставил максимум что там есть 57600
в строке config.h изменил соответственно
#define SERIAL_COM_SPEED 57600
Задержка примерно 1-2 сек. Зато теперь можно с расстояния можно настраивать-контролировать. Отнес коптер на балкон и наблюдал как он спутники поймал. (GPS) на 2порту висит
Внутренняя скорость этих модемов вроде 19200, 57600 там “виртуальные”, потому и задержка. 3DR в этом плане гораздо интереснее, плюс мощнее (но и дороже).
ок, спасибо. Попробую изменить. Подвох чувствую где то был.
А ее не поменять, судя по программк RF-Magic, 19200 это максимум.
Кто нибудь делал сопоставления пинов обычной atmega 2650 и ALL IN ONE PRO Flight Controller v1.0? есть ли таблица
Кто нибудь делал сопоставления пинов обычной atmega 2650 и ALL IN ONE PRO Flight Controller v1.0? есть ли таблица
Хм… Сравнить пины atmega 2650 и atmega 2650?
это 
с этим 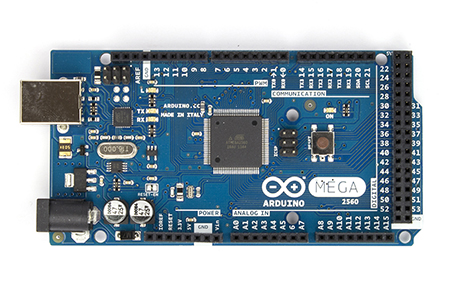
Так понятнее?
При большом желании это можно сделать по исходникам Multiwii, только зачем? При цене AIO в 50$ впаивать датчики в ардуину самостоятельно не имеет абсолютно никакого смысла.
Есть вопрос: хочу на мультивии повесить
такие датчики: lis3dh - 3-x accel, L3G4200
- 3-x гиро, АК8973 - 3-х компас.
Что думает уважаемое сообщество про
эти датчики?
хорошие датчики вместо компаса и акселя можете взять компас/акслель 2в1 lsm 330dlc это теже самые гира аксель как у вас но в одном корпусе, паять проще. Про компас не скажу не знаю, вы сами под него код будете писать? потому как мультивий не поддерживает по умолчанию ни аксель ни компас которые вы хотите.
Кто нибудь делал сопоставления пинов обычной atmega 2650 и ALL IN ONE PRO Flight Controller v1.0? есть ли таблица
Подскажите что делать.Когда трикоптер взлетает,серву клонит влево,на пульте подправляю,но если не подправить,то коптер начинает крутить и стик до упора надо вправо вести,но серва срабатывает не сразу,а через полсекунды только.Подскажите что сделать,чтобы серва на полны оборотах срабатывала сразу.
И еще,если взлетать резко,то коптер взлетает достаточно хорошо.А вот если медлено добавлять газ,то его матает.
А вам не приходило в голову что вибрации могут быть + может серва не совсем подходит (нужна цифровая) ну множество факторов может быть.
А вам не приходило в голову что вибрации могут быть + может серва не совсем подходит (нужна цифровая) ну множество факторов может быть.
Серва цифровая стоит.Вот насчет вибраций поработаю над этим.Вообще думаю заказать себе ALL IN ONE PRO и не маяться дурью.
Подскажите, в строке конфига #define ACC_ORIENTATION(X, Y, Z) {accADC[ROLL] = -X; accADC[PITCH] = -Y; accADC[YAW] = -Z;}
X,Y и Z какое направление куда для самолета? руль высоты, руль поворота, элероны?
Спасибо.
Кто нить высчитывал magnetic declination с помощью сайта magnetic-declination.com/?
Я для примера решил проверить Будапешт(пример в конфиге мультивия).
Тыцнул на город получил 4градуса 5минут. Подставил в формулу “Convert the degree+minutes into decimal degree by ==> degree+minutes*(1/60)”: => 4+5*(1\60)=4.083
В примере “3.96f”!!! Что я не так сделал?(или полюса сдвинулись? 😃 )