Делаем раму коптера своими руками. Обмен опытом.

Народ, а кто где берет стойки (дистансеры) для самодельных рептилий, tcb и тд? там, по моему, 36-37 мм.
Ali, goodluck
а кто где берет стойки (дистансеры)
Вот всякие разные… Там же недалеко пластиковые… Еще где то тут были, алюминиевы и титановые…
А я то наивный эти штуки пиллерсами называю… А они вона как в коптерах зовутьси… 😵
Там же недалеко пластиковые…
В Питере кое что из пластика можно найти ближе
я их печатаю ))
В Питере кое что из пластика можно найти ближе
Я знаю…)
Мне не горит, поэтому я с оказией заказываю из китая… Получается от 2х до 3х раз дешевле и ассортимент куда шире…
Сорри за некоторый оффтоп, но раз просили в этой теме.
Написал в блоге краткое описание своего станка.
Подажите, пожалуйста. Я уже приводил выше фото своего первого коптера, сделанного на коленке с подручных материалов.

В данной конфигурации его постоянно заваливало назад при взлете. Начал разбираться, понял, что ЦТ сильно смещен назад. Акк перевешивает. Поменял положение акка, сдвинул его ближе к ПК, таким образом, что ЦТ переместился точно в середину рамы (там же, где и ПК), а также совпал с пересечением диагоналей движков. Но ситуацию это не изменило, коптер как и прежде сносило назад. После того, как подвесил акк точно под ПК по центру, коптер начал взлететь ровно. И хотя при этом ЦТ сместился немного вперед, коптер отлично держит баланс. Буду признателен, если опытные товарищи дадут свой комментарий по этому случаю. Вычитал, что геометрический центр и центр масс должны совпадать, но вот на практике у меня из этого ничего не вышло. Возможно из-за малого опыта коптеростроения я еще чего-то не догоняю.
В данной конфигурации его постоянно заваливало назад при взлете. Начал разбираться, понял, что ЦТ сильно смещен назад.
Для начала я бы перешил регуляторы. После Мультистаров я не доверяю стоковым мультироторным прошивкам. Акселерометр правильно откалиброван? Возможно ПИДы слабенькие, Р попробовать поднять по ролл и питч.
Для начала я бы перешил регуляторы.
Что посоветуете?
Акселерометр правильно откалиброван?
Выставлял на столике с водяным уровнем несколько раз перепроверял, и разными сторонами ставил коптер на столик, аксели откалиброваны в ноль.
Возможно ПИДы слабенькие, Р попробовать поднять по ролл и питч.
Настраивал как советовали в одном видео. Поднимал до тех пор, пока рама не начинала вибрировать, потом сбросил 15-20%. Сейчас не помню точно, но что-то около 7 получилось.
Что посоветуете?
Не знаю что там внутри, нужно гуглить. Возможно Симонк.
Да, в моем Емакс по умолчанию (ну как на сайте написано) стоит Симонк.
Да, в моем Емакс по умолчанию (ну как на сайте написано) стоит Симонк.
Проверьте триммера на аппе, все ли в центре стоит. С отключенным акселем тоже криво взлетает?
Триммера в нуле. Без акселя надо будет попробовать, такой эксперимент еще не проводил.
Но ситуацию это не изменило,
Выскажу своё предположение - провода от моторов идущие к ESC слишком длинные, а вернее - “задние” длиннее “передних” и из за разного падения напряжения, получается разбаланс… выход: или сделать более толстые провода или уравнять их по длине… (вообще то такие длинные фазовые провода - ни есть гуд…)
Народ, а кто где берет стойки (дистансеры) для самодельных рептилий, tcb и тд? там, по моему, 36-37 мм.
Есть идея как поступить когда нет дистанционных втулок . Берем вытягиваемые заклепки разной длинны ,
выбиваем гвоздик и собираем из двух заклепок нужной длинны втулку . Собираем на винты М3 , при необходимости можно одеть термоусадку ,как на фото .
хостинг картинок
Что посоветуете?
Выставлял на столике с водяным уровнем несколько раз перепроверял, и разными сторонами ставил коптер на столик, аксели откалиброваны в ноль.
Настраивал как советовали в одном видео. Поднимал до тех пор, пока рама не начинала вибрировать, потом сбросил 15-20%. Сейчас не помню точно, но что-то около 7 получилось.
Я бы посоветовал поменять контроллер полета. Поставить CC3D.
Вот тоже аккумулятор не в центре.
Ни каких настроек не делал, прошел только визард.
Никакими уровнями не пользовался. Висит как прибитый даже без GPS:)
О вибрация тоже даже не задумывался, балансировку не делал.
Цена - бюджетней не бывает.
Интересная рама, есть чертежик?
Есть идея как поступить когда нет дистанционных втулок . Берем вытягиваемые заклепки разной длинны
Удобней использовать заклепки с головкой впотай
У стойки получается плоское основание-фланец. Стойка получается устойчивой, достаточно одной заклепки нужной длины.
Кроме того номинальный размер такой заклепки совпадает с ее длиной
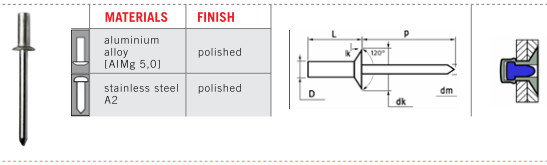
У остальных длина больше номинала на высоту головки:
Я бы посоветовал поменять контроллер полета. Поставить CC3D.
а он научился человечески возвращаться при потере сигнала домой ?
а он научился человечески возвращаться при потере сигнала домой ?
и не научится. у него для этого нету нужных датчиков