Делаем раму коптера своими руками. Обмен опытом.

Перенести ЦТ ниже, как у парашюта, вертолёта Robinson, думаю и коптер без мозга будет висеть.
И парашют и вертолет неподходящие примеры. Во первых, один ротор/купол, а не 4, а во вторых, парашют никогда не снижается вертикально вниз, если снос не контролируется парашютистом. Ровно так же как и вертолет не будет снижаться вертикально, если пилот или автоматика не будут вносить коррекцию в циклический шаг… В нашем случае, мозг контролирует тягу на каждом роторе в зависимости от состояния сенсоров…
Зачем спорить, я предложил вариант, который устроил бы всех… Снимите видео, как коптер саморегулируется за счет выкосов, то есть без контроллера совсем, либо в режиме исключающем горизонтальную стабилизацию… Например режим MANUAL в NAZAподобных контроллерах… Тогда вопрос с выкосами закроется раз и навсегда…)
у самолёта за счёт линейного движения крыльев известного профиля и у коптера лопастей ротора с аналогичным профилем
Вы либо путаете, либо притягиваете за уши чисто теоретически…) У винтов с фиксированным шагом профиль крайне редко похож на профиль самолетного крыла…)
Посмотрите анфас на пропы АРС мультироторные или на “треугольники”… А вот вертолетные лопасти и некоторые Т-стайл пропы, действительно имеют такой профиль…
А уместно здесь вспомнить про центр давления и центр масс, это ближе к самолетам? По моему лучше рассматривать коптер без упоминания крыльев.
Отбросьте всё лишнее и рассматривайте векторы подъёмной силы.
Все верно. Но ошибка в том, что у самолета пассивная стабилизация, у коптера - активная. При наличии активной стабилизации, дополнительное уменьшение тяги двигателя выкосом будет просто нивелироваться. По этой же причине невозможно летать на коптере без гироскопов. Система не в состоянии себя стабилизировать механически. А самолет в состоянии.
Я хоть слово про электронику сказал?
И парашют и вертолет неподходящие примеры.
Это примеры доп стабилизации, снижением ЦТ типа маятник.
У верта в полёте ротор в форме воронки, не напоминает выкос у коптера?
Семечка клёна стабилизируется ротором из одной лопасти в форме воронки.
Вы либо путаете, либо притягиваете за уши чисто теоретически…) У винтов с фиксированным шагом профиль крайне редко похож на профиль самолетного крыла…) Посмотрите анфас на пропы АРС мультироторные или на “треугольники”… А вот вертолетные лопасти и некоторые Т-стайл пропы, действительно имеют такой профиль…
Я это знаю,
неужели трудно абстрагироваться от профилей, контроллеров, роторов, крыльев
и зрить в корень, то бишь векторы подъёмной силы.
Так понятно?
А моменты сил (относительно центра масс), которые фигурируют в Ваших рассуждениях, не меняются.
Я писал на память, вспоминая школьный курс физики. Мог и перепутать терминологию. Но суть то ясна, независимо от мнений всех тут собравшихся, коптер с выкосами представляет собой систему, которая может сама себя стабилизировать по горизонту, в определенных пределах, если поместить ее в идеальные условия. Такой квадрокоптер в однородной воздушной среде, где есть только воздух, сила тяжести. На практике это сложно реализуемо из за разной тяги двигателей, несовершенства регулей, неидеальных пропов и кучи внешних факторов, начиная полетником, который имеет свой взгляд на стабилизацию коптера, заканчивая ветром и воздушной подушкой у земли.
Придут движки (застряли на границе), попробую сообразить стенд аля весы, два луча и движки с выкосами на центральной опоре, которая будет изображать центр масс. Как куплю аппу (я только собираю коптер, не все купил еще), поэкспериментирую с акрорежимом (или какой режим не дает мозгам вмешиватся в стабилизацию коптера без команды?).
думаю запилить себе складную раму типа ТБС. есть труба карбоновая 20 мм, вот маюсь, морочиться ли с ней(мотормаунты, защелка на раме для складывания) или взять проверенное решение с профилем десятым?
взять проверенное решение с профилем десятым?
однозначно.
Так понятно?
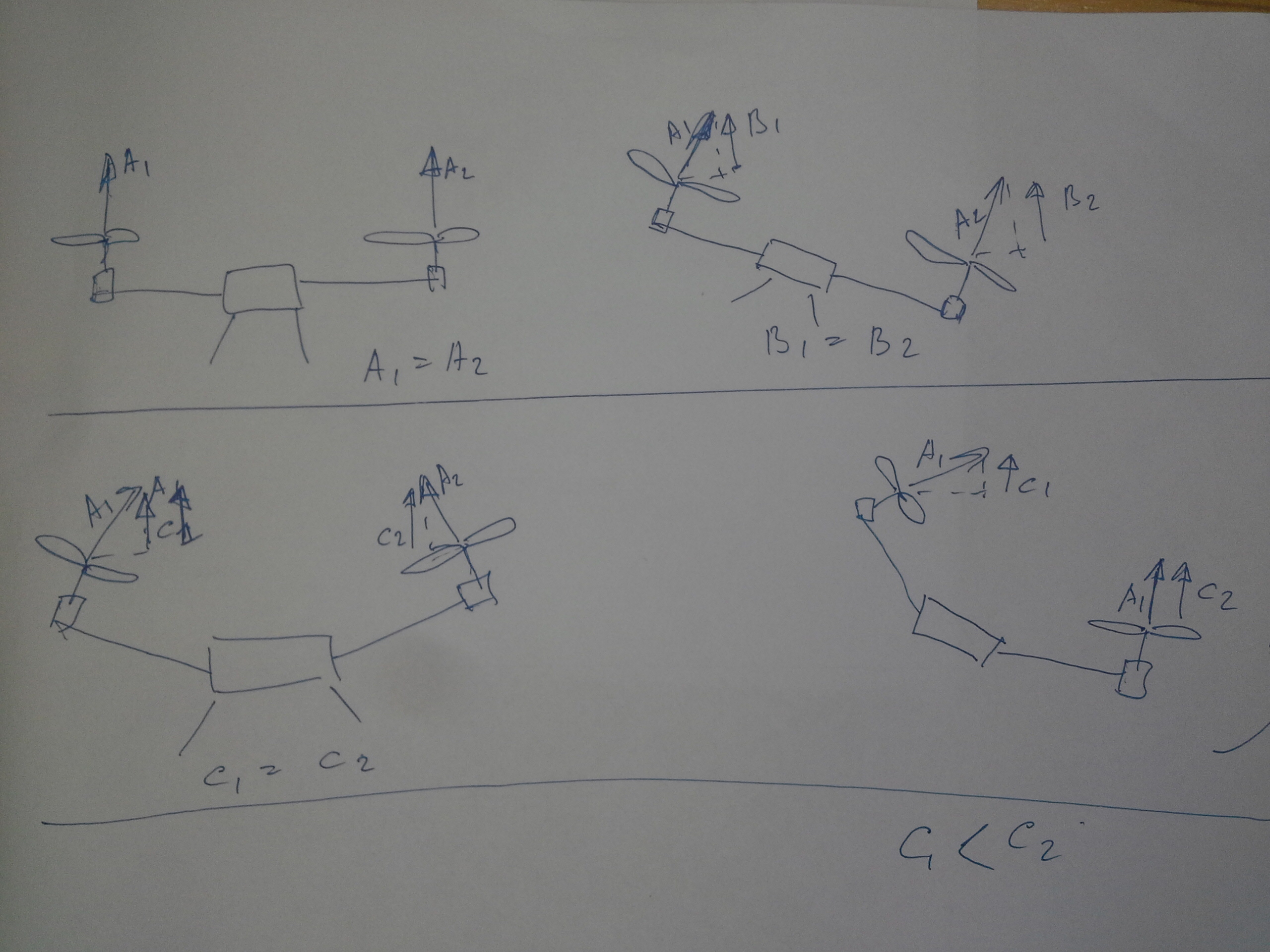
Нет. С1 < С2 и С1+С2 < A1+A2 означает что агрегат будет падать (и лететь вправо), а не поворачиваться. Моменты не изменились.
Но суть то ясна
Суть не ясна. Интуитивно мне тоже представляется, что выкосы чем-то подобны V-образному крылу. Но удовлетворительных объяснений этому не вижу. Сам пробовал найти - тоже не нашел. Рассказы про V-крыло по приводившимся тут ссылкам тоже не особенно убедительные. Например, на одной из картинок самолет при боковом порыве ветра почему-то поворачивается навстречу ветру.
С1 < С2 и С1+С2 < A1+A2
а если принять что в этом случае коптер не падает?
С какого х…я он полетит вправо???
Так понятно?
представляет собой систему, которая может сама себя стабилизировать по горизонту, в определенных пределах, если поместить ее в идеальные условия.
А разве с этим кто то спорил? Просто, мы делаем коптеры из говна и палок неидеальных комплектующих и летаем в неидеальной среде… Потому я и написал, что если этот эффект и будет заметен, то только на относительно больших размерах рам и пропеллеров…
“Весы” можете не делать, если они будут закреплены на неподвижной оси, Вы получите простейший ПИД-регулятор, к тому же на точке опоры (о которой я писал выше), если, все же, захотите делать, делайте на двухрычажном маятнике, тогда условия более или менее приблизятся к реальным…)
Кстати, Ваш вариант с водой и поплавками не проходит…) Потому что, надо рассматривать систему работающую внутри воды, а не на ее поверхности…
С какого х…я он полетит вправо???
А горизонтальный вектор тяги Вы куда денете?
Дайте мне яду!!!
А горизонтальный вектор тяги Вы куда денете?
он компенсируется моментом который дает разница с1 и с2!!!
Почитайе хотя бы механику в детской редакции!!!1
Потому что, надо рассматривать систему работающую внутри воды, а не на ее поверхности…
водой мы просто имитируем удерживание коптером одной высоты. Мы его “подвешиваем”, только вместо тяги пропеллеров он висит на поплавках. Признаться, я не знаю как выглядит двурычажный маятник, гугл толком не говорит)
Нет. С1 < С2 и С1+С2 < A1+A2 означает что агрегат будет падать (и лететь вправо), а не поворачиваться. Моменты не изменились.
И у меня результирующий вектор получился вправо вниз.
а если принять что в этом случае коптер не падает?
С какого х…я он полетит вправо???
C какого … принимать, если сумма вертикальных проекций сил стала меньше, а сумма горизонтальных направлена вправо. Пикируем вниз и вправо.
он компенсируется моментом который дает разница с1 и с2!
Сила компенсируется моментом - это новое. Момент, создаваемый С1 и С2, компенсируется моментом, который создают различные по величине перпендикулярные С1 и С2 составляющие. В итоге, как был момент равен нулю, так и остался при повороте. А горизонтальные и вертикальные проекции сил изменились.
он компенсируется моментом который дает разница с1 и с2
А как же мы тогда летаем? В акро, например… Почему коптер наклоненный на Х градусов так и летит…? Может уже хватит теорий и
механики в детской редакции
вернитесь уже в практическую плоскость. Третий раз предлагаю, снимите видео самостабилизирующегося за счет выкосов коптера и вопрос будет закрыт.
И знаки препинания экономьте, Вы взрослый человек а не малолетняя истеричка…)
Мы его “подвешиваем”, только вместо тяги пропеллеров он висит на поплавках
Не забывайте, при наклоне такого коптера, один поплавок будет находиться в одной среде, а второй - в другой… А в реальности оба пропеллера работают в одной среде, но “проскальзывают” по разному…
я не знаю как выглядит двурычажный маятник
Ось “весов” должна свободно двигаться в горизонтальной плоскости… Например, берете обычный маятник и к подвижной части крепите ось “весов”. В идеале, это точно такие же “весы”, только вертикальные, на одной стороне ось вращения вторых весов, на другой груз-эквивалент…
А как же мы тогда летаем? В акро, например… Почему коптер наклоненный на Х градусов так и летит…? Может уже хватит теорий и
Наклоненный на Х градусов по ролу, так и летит прямо носом вперёд?
Сидел, рисовал векторы. Думал. Надо будет пробовать. Схема говорит одно, разум говорит другое.
На схеме выходит, что вектор горизонтальной силы увеличивается при наклоне, и в сумме с уменьшающимся вектором подъемной силы все равно равен подъемной силе с противоположной стороны коптера, и нивелирует силу, которая стремится вернуть коптер в устойчивое положение… Тогда коптер бесконтрольно полетит вперед (влево, вправо, назад), в дело вступает лобовое сопротивление… Мои знания почти кончились. Нужно рассчитывать центр давления, чтобы при движении вперед коптер норовил завалится назад. Или площадь пропеллера, который сзади и под большим углом, послужит воздушным тормозом?
А выкосы наружу тогда делают коптер гипернеустойчивым?
Блин, быстрее бы аппу купить.
Простой пример: какая табуретка будет устойчееве - у которой ножки смотрят вовнутрь или наружу?
Простой пример: какая табуретка будет устойчееве - у которой ножки смотрят вовнутрь или наружу?
Этот пример слишком прост.😃 И нам он не подходит. Но ответ есть - это табуретка на 3-х ногах.
Наклоненный на Х градусов по ролу, так и летит прямо носом вперёд?
Таки, да… А как по Вашему летали, и продолжают летать всяческие КУКи, мультивии и прочие агрегаты с отключенным селфлевелом? Будет лететь в сторону наклона с изменением высоты в зависимости от уровня газа… Разумеется, со временем, угол наклона будет меняться от влияния внешних причин… Направления и силы ветра, например…
Вот знаменитое видео…)
Смотреть с 4:00
И нам он не подходит
нам бы мозг взорвать народу своим не пониманием
Тогда коптер бесконтрольно полетит вперед (влево, вправо, назад),
Браво…) Разве это не очевидно безо всяких теорий, механики детского уровня и все такое…? )
быстрее бы аппу купить
Если дело только в аппе (все остальное в наличии), можете из ардуинки простой ШИМ-генератор сделать, хоть 4хканальный… Для тестов на стенде пойдет…