Мультироторные системы на основе платы КК контроллера от kkmulticopter.kr

YAW вроде как не держит курс
Попробовать в руке
И если что гиру инвертировать
YAW вроде как не держит курс
Попробовать в руке
И если что гиру инвертировать
Земляк,а подскажи как инвертировать,а то каша уже в башке😵
Вроде так:
- Проверка установок гироскопов:
- Снимите пропеллеры.
- Включите передатчик и квадрокоптер.
- Установите газ примерно на 1/4. Двигатели должны запуститься.
- Наклоните квадрокоптер вперед. Передний двигатель должен увеличить обороты. В противном случае реверсируйте гироскоп тангажа (pitch gyro).
- Наклоните квадрокоптер налево. Левый двигатель должен увеличить обороты. В противном случае реверсируйте гироскоп крена (roll gyro).
- Поверните квадрокоптер по часовой стрелке. Передний и задний двигатели должны увеличить обороты. В противном случае реверсируйте гироскоп рыскания (yaw gyro).
- Реверсирование каналов гироскопов:
- Установите потенциометр Roll Gyro gain Adjustment на ноль.
- Включите передатчик и квадрокоптер.
- Светодиод должен мигнуть 10 раз.
- Переместите ручку передатчика соответствующую гироскопу, который Вы хотите реверсировать.
Правая влево/вправо CH1 - Aileron – элероны Roll - крен
Правая вперёд/назад CH2 - Elevator - руль высоты Pitch - тангаж
Левая вперёд/назад CH3 - Throttle - газ -
Левая влево/вправо CH4 - Rudder - руль направления Yaw - рыскание - Светодиод будет мигать непрерывно.
- Выключите квадрокоптер.
- Выполните эти действия последовательно для всех гироскопов, которые необходимо реверсировать, после чего верните потенциометр Roll Gyro gain Adjustment в изначальное положение.
- Реверсирование каналов гироскопов:
- Установите потенциометр Roll Gyro gain Adjustment на ноль.
- Включите передатчик и квадрокоптер.
- Светодиод должен мигнуть 10 раз.
У меня такое дело…при установке Roll Gyro gain Adjustment на ноль ничего не происходит:)
Оставил винты на правой стороне(Х у меня),даю1/4 газа и берусь за противоположные лучи,приподнимаю и имитирую раскачку вправо-влево по ходу движения (крен)-А моторы то не реагируют,качаю вперед-назад по ходу движения (тангаж)-Моторы реагируют на сопротивление моим движениям,сопротивление наблюдается и при вращении вокруг оси коптера (рысканье).
Это что получается, что Roll Gyro у меня не пропаян или мертв или я что то путаю???Что посоветуете?😵
У меня такое дело…при установке Roll Gyro gain Adjustment на ноль ничего не происходит:)
Оставил винты на правой стороне(Х у меня),даю1/4 газа и берусь за противоположные лучи,приподнимаю и имитирую раскачку вправо-влево по ходу движения (крен)-А моторы то не реагируют,качаю вперед-назад по ходу движения (тангаж)-Моторы реагируют на сопротивление моим движениям,сопротивление наблюдается и при вращении вокруг оси коптера (рысканье).
Это что получается, что Roll Gyro у меня не пропаян или мертв или я что то путаю???Что посоветуете?😵
Выкрутите крутилку в ноль-чувствительность гирика-0, выкрутите в максимум, чувствительность максимальная. Чем больше чувствительность-тем реще квадрик отвечает на отклонения. У вас крутилка в нуле, значит квадр никак не будет отвечать на отклонения.
В связи с переходом на мультивий, сабжевая плата валяется без дела. Так у всех или кто-то придумал ей какую-нибудь другую работу, кроме как стабилизировать квадрик? Я понимаю, что на трёх гирах далеко не уедешь, но вдруг есть какие-нибудь интересные решения.
Никак не могу разобраться в подключении контролера. После подключения батареи один раз мигает диод на контролере а двигатели начинают пищать короткими сигналами по кругу. На пульт никакой реакции нет. Контролер стоит KKmulticopter 5.5, двигатель A2212/13Т 1000kv, ESC 30A, пульт и передатчик Turnigy 9x. Подскажите, где искать проблему
где искать проблему?
Крутилки может накрутили нетуда?
Крутилки может накрутили нетуда?
Ничего не трогал, из коробки достал и на место поставил.
Похоже надо инвертировать канал газа. Делать это без пропов.
Резисторы на плате поставить с среднее положение, проверить прошивку.
Ничего не трогал
Ну вы же его настраиваете как-то 😃 Или имели ввиду, что положили в коробку его рабочим, а вышел он вот таким?
Я как-то раму менял после краша, так тоже пошёл летать, и стало закручивать по яву. Я такой типа - не понял! Пришёл домой и понял что инвертирована гира. Казалось бы! Ничего не менял, только снял мосх с одной рамы и прикрутил на другую. Инвернул гиру и полетел.
Ну вы же его настраиваете как-то Или имели ввиду, что положили в коробку его рабочим, а вышел он вот таким?
Я имел ввиду, что как китаец его в коробку положил, так я и достал)) Это мой первый квадр. До этого только самолет и вертолет.
Похоже надо инвертировать канал газа.
Инвертировал - тоже самое
Резисторы на плате поставить с среднее положение
Пробовал в разных положениях
проверить прошивку
В комплекте програматора не было((
Проблема может быть в неправильно подключенных двигателях и должен ли гореть диод на плате?
В связи с переходом на мультивий, сабжевая плата валяется без дела. Так у всех или кто-то придумал ей какую-нибудь другую работу, кроме как стабилизировать квадрик? Я понимаю, что на трёх гирах далеко не уедешь, но вдруг есть какие-нибудь интересные решения.
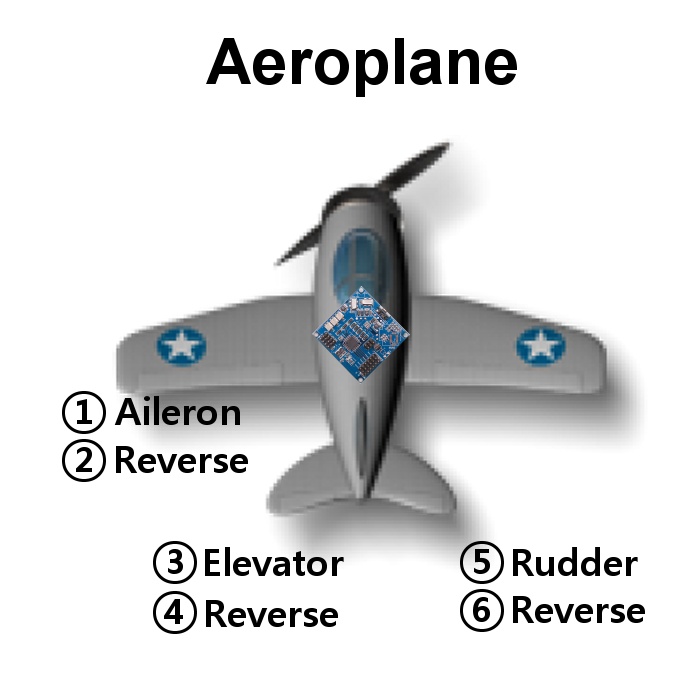
Можно ставить на самолет или твинкоптер, прошивки под это дело есть тут.
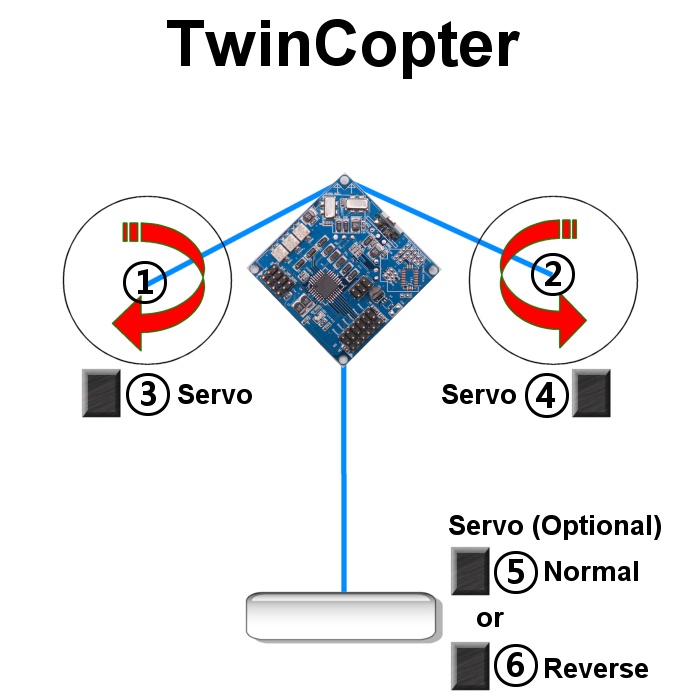
Твин - интересен по внешнему виду и прост в реализации
Пробовал в разных положениях
Сначала надо пройти все процедуры настройки по первому посту (разумеется сброс потом не делать). Потом поставить все резисторы в центр.
В комплекте програматора не было((
И кто в этом виноват?))
Проблема может быть в неправильно подключенных двигателях и должен ли гореть диод на плате?
При неправильно подключенных двигателях они будут вращаться лишь в другие стороны. А если регуляторы не туда подключили, то хоть какие-то должны работать, а у вас не работает все, как я понял.
Если не ошибаюсь, то при включенном диод моргает, а когда сделаете арминг - горит (уже забыл все, могу ошибаться).
Если не ошибаюсь, то при включенном диод моргает, а когда сделаете арминг - горит (уже забыл все, могу ошибаться).
От прошивки зависит, у меня до арминга - не моргает и не горит, после арминга - горит постоянно.
Твин - интересен по внешнему виду и прост в реализации
Только сложен в постройке и отстройке из-за перекосов.
Как раз подходит для того - что бы “поиграться с ненужным оборудованием” 😃
Сначала надо пройти все процедуры настройки по первому посту (разумеется сброс потом не делать). Потом поставить все резисторы в центр.
Настраивал. Все мигало и пищало как в инструкции, но ничего не изменилось.
Т.е. включаете и моторы начинают пищать?
Т.е. включаете и моторы начинают пищать?
Да, начинают пищать короткими сигналами поочереди. Подключал каждый мотор к приемнику напрямую и все они работали нормально.