А давайте обсудим Arducopter - APM

Возник вопрос- под управлением АПМ есть ли разница в надежности гекса или квадро?
вчера словил непонятный глюк,дома подготовил квадрик,проверил перед выходом,приезжаю на полю,подключаю питание,а он пикает моторами поочередно,как при коннекте в терминале,но пиканье более частое,осд отображается,не армится,ну думаю пипец доигрался перепрошивкой осдшки,прихожу домой а он сцуко работает нормально.вот теперь думаю что это было,а вдруг в следущий раз в полете глюкнет,по логам ничего криминального не заметил,ошибки только по фейлсейву гпс,причем throut отображает реакцию на стик газа,видно как режимы я переключал,где еще в логах посмотреть можно по данному глюку.питание апм в порядке,3.3в стаб заменен)))
Возник вопрос- под управлением АПМ есть ли разница в надежности гекса или квадро?
гекса надежнее .
одним из ненадежных элементов считается регуль-мотор-проп
при отказе одного луча квадр падает с любым контроллером
хорошо настроенный гексакоптер с апм сначала дергается но потом выравнивается.
проверено на практике (случайно, попался глючный регуль)
Ага Y при потере нижнего мотора даже не дергается 😃
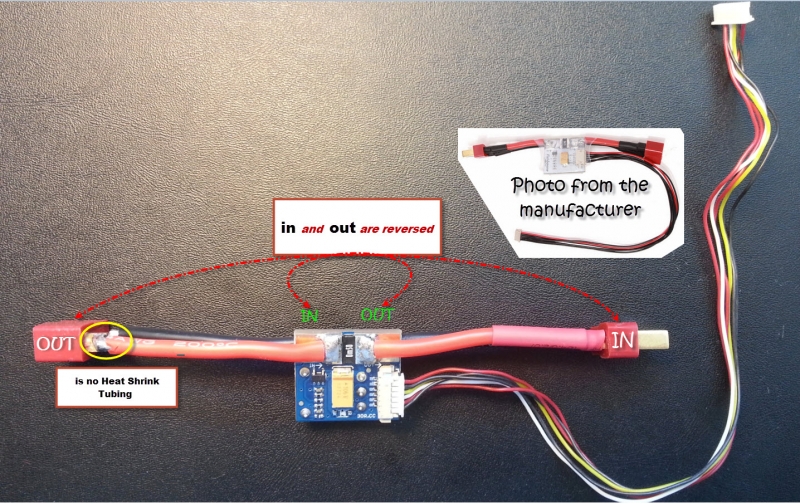
После проверки с пристрастием повер модуля, выяснилось, что китайцы перепутали разъемы ХТ-60 местами.
Я им по этому поводу даже злобный отзыв писал… у меня тоже вход с выходом перепутан был, да и как оказалось вообще штука бесполезная, ибо работает не верно, тока выдает мало +5 (а должен то вроде 5.3 или нет? ПРосто напряжение на APM по логам с ним у меня падало до +4.6В), Силу тока меряет криво (Калибровал не раз, но вечно либо по 3А показывает на полном газу, либо 300)Я его только ради мониторинга напряжения использую… только место собака на коптере занимает.
Не исключаю конечно что я просто неправильно его настраивал.
Фото моего…
поочередно,как при коннекте в терминале,но пиканье более частое
Было так, на китайских регулях. Пищал на морозе один двигатель и не хотел запускаться, дома в тепле все нормально. Лечилось калибровкой регулей прям в поле.
можно ли ограничить максимальную скорость полета в режиме drift или althold (как это сделано для loiter), кроме кривых (крайних точек) стика на самом пульте?
Компас. Или не настроен, или не верно стоит, или компасмот не проведен
Спасибо! Да, компасмотом я пренебрег. А стоит компас в АРМ, а она на скотче двустороннем “3м” приклеена к пластине рамы. Под пластиной - акк и регули тут же. Т е получается, коптер искал направление?
Было так, на китайских регулях. Пищал на морозе один двигатель и не хотел запускаться, дома в тепле все нормально. Лечилось калибровкой регулей прям в поле.
не все же разом,хотя раз в логе видно что на throut реакция есть остается только предположть что дело на самом деле в регулях
не все же разом,хотя раз в логе видно что на throut реакция есть остается только предположть что дело на самом деле в регулях
Незнаю, может быть я и не прав, но по логике, калибруя регули мы задаем им пороги входного сигнала от и до. На морозе возможно что-то происходит, что они не дотягивают до нижнего порога, и думают что аппа не передает сигнала и пищат, а в логах то все будет норм, т.к. они мозг видит весь диапазон… ну как-то так.
можно ли ограничить максимальную скорость полета в режиме drift или althold (как это сделано для loiter), кроме кривых (крайних точек) стика на самом пульте?
В настройках есть параметр максимальный угол наклона, скорость в ручных режимах (кроме акро) зависит от него. Но лучше уменьшить расходы на пульте, потому что результат будет одинаковый, а перестройка будет делаться одним тумблером.
Уже как-то предупреждали в теме что максимальный угол наклона лучше не ограничивать. Ибо улетит коптер по ветру и не вернется.
Ибо улетит коптер по ветру и не вернется.
Да, кстати верный коммент. Я себе поставил расходы по 50% на крены на пульте чтобы маневрировал по мягче, и против ветра квадр еле двигается, поэтому если уж и ограничивать, то только на Аппе, чтоб экстренно можно отключить
максимальный угол наклона
а можно название?
ATC_RATE_XX_MAX - это скорость отклонения платформы, без ограничения предела
MNT_ANGMAX_X - это предельные углы качения подвеса, а не платформы
H_XXX_MAX - углы тарелка автомата перекоса (рудиментарный параметр)…
господа, подскажите, где можно приобрести плату сравнительно годного качества с оригиналом APM 2.6?
Ибо улетит коптер по ветру и не вернется
тут проблема в том, что мне бы ограничить угол так, чтобы коптер более 60км\ч не набирал (воздушная скорость). Врядли в такой наземный ветер буду летать… а автомиссии на запредельных высотах я не планирую, только в ручном режиме. А там всегда можно эшелон сменить для выхода из потока
а можно название?
Кажется ANGLE_MAX. Но лучше менее 35гр не ставить, а то и вправду унесет.
Ну не знаю. Я бы ничего не ограничивал. Яркий пример - мой последний полет. На поверхности практически ветра не было. Когда взлетел по ФПВ на 200 метров - вижу коптер вроде сносит. Фигня война, встал против ветра набираю высоту дальше с небольшим наклоном (“лечу” против ветра), потом замечаю - ой-ой-ой у меня уже скорость сноса - 30-40 км/ч и уже удаление приличное, но самое главное - уносит на город, уже лечу над частным сектором! Надо возвращаться. Но ветер был очень сильный. Пришлось закладывать большие углы атаки (сильно снизиться не мог - из-за леса терялся видеосигнал) и пикировать с полным газом. Коптер при этом разгонялся 60 и более км/ч. Представляю, был бы у меня ограничен угол наклона или скорость полета - гуд бай коптер! А так - я с большим трудом долетел поближе и смог снизиться ниже этого верхового ветра. Адреналину получил - гору. Если бы панике поддался - точно был бы краш с последствиями…
Так что подумайте, нужны ли вам искусственные ограничения маневренности вашего коптера…
Адреналину получил - гору
я просто немного залетавшись обнаружил себя на 83км\ч летящим на березовую рощу. пришлось совмещать торможение в пол с набором высоты для “быстро перепрыгнуть”. повернуть не было уже возможности…
так вот токи в момент набора высоты+торможение в 3 раза превысили ток висения.
в 3 раза превысили ток висения.
Ну это не смертельно. Возможные потери - вмг или акк. А если будет ограничение - можно аппарата лишиться.
Кратковременное превышение максимального тока (в разумных пределах, разумеется) к проблемам с моторами или регуляторами не приведет. Самое плохое что может быть - сильно просядет батарейка, и, из-за низкого напряжения, слетит синхронизация, но для этого падение должно быть очень сильным и батарея сильно разряжена. Ну и сами узлы коптера должны быть рассчитаны на работу в максимальных режимах, иначе летать на нем опасно.
В вашем случае нужен контроль скорости по gps, летайте в лойтере. А для быстрых маневров нужен опыт и пространство.
я просто немного залетавшись обнаружил себя на 83км\ч летящим на березовую рощу. пришлось совмещать торможение в пол с набором высоты для “быстро перепрыгнуть”. повернуть не было уже возможности…
так вот токи в момент набора высоты+торможение в 3 раза превысили ток висения.
наверное тут под сотку носится
www.youtube.com/watch?v=xWCK-KzsI-4
практически на сплошной ловкости рук