А давайте обсудим Arducopter - APM

Кому? Козину?
Не пойму, при чем тут Козин? У него ничего не горело 😃
Пост с которого цитата, содержит предложение дарения… правда по Киеву
- Обратил внимание что когда курсор мышки ставлю на точку старта коптера показывает дикое растояние до дома,
Второй вопрос отпадает, проблему решил.
…сгорел синим пламенем контроллер …сделаный на ровных коленках Алексея Козина…
Товарищ Аврора, Вы уверены в этом? фотку предоставьте, прежде чем порочить человека!
Как сейчас модно крепить арду к раме? Какие демпфера пользовать?
Раньше использовал вот такие демпферы:
У меня вот такая штука стоит - www.dx.com/p/299842
вибрации, как правило, в пределах нормы, хотя иногда немного выходят за пределы. Летает нормально. Теперь использую двусторонний скотч с вспененной основой, который идет в комплекте к Pixhawk, вот тут его видно
s3.amazonaws.com/…/pixhawk_kit_reduced.jpg?1393193…
он толщиной около 5мм, очень мягкая основа. Вибрации гораздо меньше чем у демфера на резинках (по Х и У ±2), веса никакого, крепится быстро. Один недостаток - почти одноразовый (почти, потому что если аккуратно снять, то потом можно еще пару раз нацепить на тонкий безосновный двусторонний скотч). Вот где его купить отдельно не нашел - по маркировке 3М нашел только двусторонний безосновный скотч, который они клеят к этой вспененной 5мм основе.
Ну опечатался конечно.
Ну, если очепятка, тогда еще вопрос. Сообщение появляется после арминга? И последний, загрузка контроллера после подключения питания заканчивается штатно? Смысл вопросов в том, что указанное сообщение, по моему опыту, появляется при попытке заармит коптер, держа его в руках. Гироскоп не прходит предстартовую проверку. Второй вопрос снимается, поскольку с неисправным гироскопом контроллер вообще не стартует. Застрянет на стадии запуска.
Смысл вопросов в том, что указанное сообщение, по моему опыту, появляется при попытке заармит коптер, держа его в руках.
Упс… Об этом не подумал, он у меня на проводе УСБ болтался, наверное так и есть, мой косяк. Но сейчас всё нормально работает и даже уже в комнате подлетнул на нём. Подробнее ТУТ.
Товарищ Аврора, Вы уверены в этом? фотку предоставьте, прежде чем порочить человека!
Я не очень понял с кем вы разговариваете, может с зеркалом? Я вАм ничего не собираюсь предоставлять и вообще не сильно с вами знаком. Алексея никоим образом не порочил, знаю его лично и очень уважаю как инженера и человека. По плате проблему описал ему в личку. Надеюсь именно он разберется и Расскажет уважаемому сообществу в чем дело.
Если кому интересно, краткие подробности. Внезапная смерть. На столе, при подключенном питании, безо всякого вмешательства извне, загорелись все светодиоды и собственно все. Миссион планер его не видит, даже как девайса. Видимых повреждений и выгораний нет.
Так что товарищ Фрипух, вы бы обороты сбросили.
А “синим пламенем” это фигура речи под названием Метафора - посамообразовывайтесь на досуге ru.wikipedia.org/wiki/Метафора.
Я предложил забрать на реанимацию, если согласится, расскажу в чем проблема
Нет, не соглашусь. У меня общение с местными госорганами вызывает идиосинкразию. Они там все ксеноморфы:) Так что только Куеф.
Где то было видео, на этой неделе выкладывали, как влияет отключенный минусовой провод на входящий сигнал регуля. В конце ещё осциллограмма была показана, там шумов…
Всегда сигнальный провод должен быть проложен рядом с минусовым, а лучше витой парой, а ещё лучше коаксиалом.
Я отрезаю лишние провода, даже стабы сдуваю, а нафига лишний вес таскать 😃
А где это видео, посмотреть бы? Сам всегда тяну до регуля один управляющий провод, минус в 10 раз толще идет рядом и так же успешно вливается как в минус регуля, так и в АРМ. Причем не важно с БЕКом регуль или нет, родные провода я сдуваю, они всегда коротки, протягиваю свой единственный 28-30 AWG на управление.
Интересно посмотреть как же это так еще один провод минуса от регуля до контроллера убирает помехи, как раз и создавая минусовое кольцо?
Собрал коптер на Н раме, поставил APM 2.6, прошил прошивкой Arducopter V3.2 и сегодня совершил первый вылет. В настройках выбрал раму Н. Небольшой ветерок порядка 2м/сек отрыв от земли метра на три в режиме стабилизации и зависание - всё хорошо, висит, чуть-чуть дрейфует по ветру, дальше поднимаюсь метров на 10 полёты вперёд, назад, влево, вправо - всё адекватно. Все эти манипуляции заняли минуты 3-4, дальше опять зависание и буквально через минуту коптер полез вверх, на стик газа никакой реакции - газ в 0 а он лезет вверх и довольно шустро, переключаюсь в режим Loiter - появилась реакция на стик газа. Чуть снизился и обратно в режим Стабилизации - все управление адекватное но проходит наверное минута и всё повторяется снова - переключение в режимы Loiter и Alt Hold востанавливают управление. Приземлился, передохнул минут 5 и ещё одна попытка - пару минут всё нормально а потом опять в верх, посадил и вот теперь ломаю голову где копать, сам автопилот был прикрыт поролоном но ведь а режиме стабилизации вроде бы баро не участвует. Телеметрию на земле не писал, мой нетбук по USB качает без проблем а вот по 3DR 915МГц тупит безбожно до зависания а как скачать (если это можно) уже дома пока не знаю.
Прошу вашей помощи в решении этой проблемы.
У тебя телеметрия подключена? Был глюк один в один, даже логи выкладывал, тогда посмеялись над “неопознанным” режимом Position даже не обратив внимания на произвольное газ в пол. Предшествовал этому сбой в телеметрии. Я не знаю, из-за чего он происходит, есть подозрение, что из-за раздельного питания OSD, но происходит постоянно. Решение нашел одно - ферритовое кольцо на провод телеметрии от АРМ. Тогда это прекращается. Тут что-то пренебрег колечком, тоже новую раму на Н собрал, ну и вот получил результат. Еще недавно переделал модуль ОСД, замкнул минус и плюс по всей плате чтобы был единым (раньше всегда делал как “рекомендуют”, своё питание на аТмегу от контроллера и своё “независимое”, на МАХ от модуля в ОСД), отрезал дорожку от встроенного питания и запитал все от 5В контроллера. Еще не тестировал, но есть подозрение, что сбои прекратятся и без ферритового кольца. Это, кстати, опять же на тему “двух” минусов.
Собрал коптер на Н раме, поставил APM 2.6, прошил прошивкой Arducopter V3.2 и сегодня совершил первый вылет. В настройках выбрал раму Н. Небольшой ветерок порядка 2м/сек отрыв от земли метра на три в режиме стабилизации и зависание - всё хорошо, висит, чуть-чуть дрейфует по ветру, дальше поднимаюсь метров на 10 полёты вперёд, назад, влево, вправо - всё адекватно. Все эти манипуляции заняли минуты 3-4, дальше опять зависание и буквально через минуту коптер полез вверх, на стик газа никакой реакции - газ в 0 а он лезет вверх и довольно шустро, переключаюсь в режим Loiter - появилась реакция на стик газа. Чуть снизился и обратно в режим Стабилизации - все управление адекватное но проходит наверное минута и всё повторяется снова - переключение в режимы Loiter и Alt Hold востанавливают управление. Приземлился, передохнул минут 5 и ещё одна попытка - пару минут всё нормально а потом опять в верх, посадил и вот теперь ломаю голову где копать, сам автопилот был прикрыт поролоном но ведь а режиме стабилизации вроде бы баро не участвует. Телеметрию на земле не писал, мой нетбук по USB качает без проблем а вот по 3DR 915МГц тупит безбожно до зависания а как скачать (если это можно) уже дома пока не знаю.
Прошу вашей помощи в решении этой проблемы.
вот дежавю: первый полет квадрика повисел 2-3 минуты и полез вверх, я не стал ничего делать. Он полез вверх потом приземлился и успокоился. у меня версия была такой, что выставляя напряжения возврата на точку при проседании батарейки я завысил напряжение и режим сработал, аппарат поднялся на 15м и приземлился. Как только занизил этот параметр все стало на свои места. Вот как раз переключения режимов и выводит аппарат из RTL, что и очень похоже на ваше описание.
Нет, не соглашусь. У меня общение с местными госорганами вызывает идиосинкразию. Они там все ксеноморфы Так что только Куеф.
Как-то не понял… про госорганы, ну да ладно, есть человек в Киеве, может подъехать. Хотя НовойПочтой тоже можно.
А где это видео, посмотреть бы?
Не могу найти, а тема про красный проводок действительно актуальна 😃
Вроде Шурикус выкладывал это видео.
Вышло обновление 3.2.1.
Кто пробовал ставить его -в чем разница с 3.2 ?
И вообще - у кого версия 3.2 залита ?, как летается ? статистика,глюки ,краши?
вот дежавю: первый полет квадрика повисел 2-3 минуты и полез вверх, я не стал ничего делать. Он полез вверх потом приземлился и успокоился. у меня версия была такой, что выставляя напряжения возврата на точку при проседании батарейки я завысил напряжение и режим сработал, аппарат поднялся на 15м и приземлился. Как только занизил этот параметр все стало на свои места. Вот как раз переключения режимов и выводит аппарат из RTL, что и очень похоже на ваше описание.
Нет, проблема не в этом. Во-первых, RTL по напряжению всегда отключен, не понравилась фишка, во вторых RTL никогда не дает газ 100%.

может кто подскажет, перегрузил Windows, установил пм который был раньше … при попытке соединения - появляетса вот такое …
что может быть ? а с планшетом по модему- всё соединяетса …
Слетал называется настроил ПИДы… В теме про самодельные рамы недавно выкладывал логи. Было все идеальное. Минимальные вибрации, идеальное висение в альтхолде. Лойтер так себе.
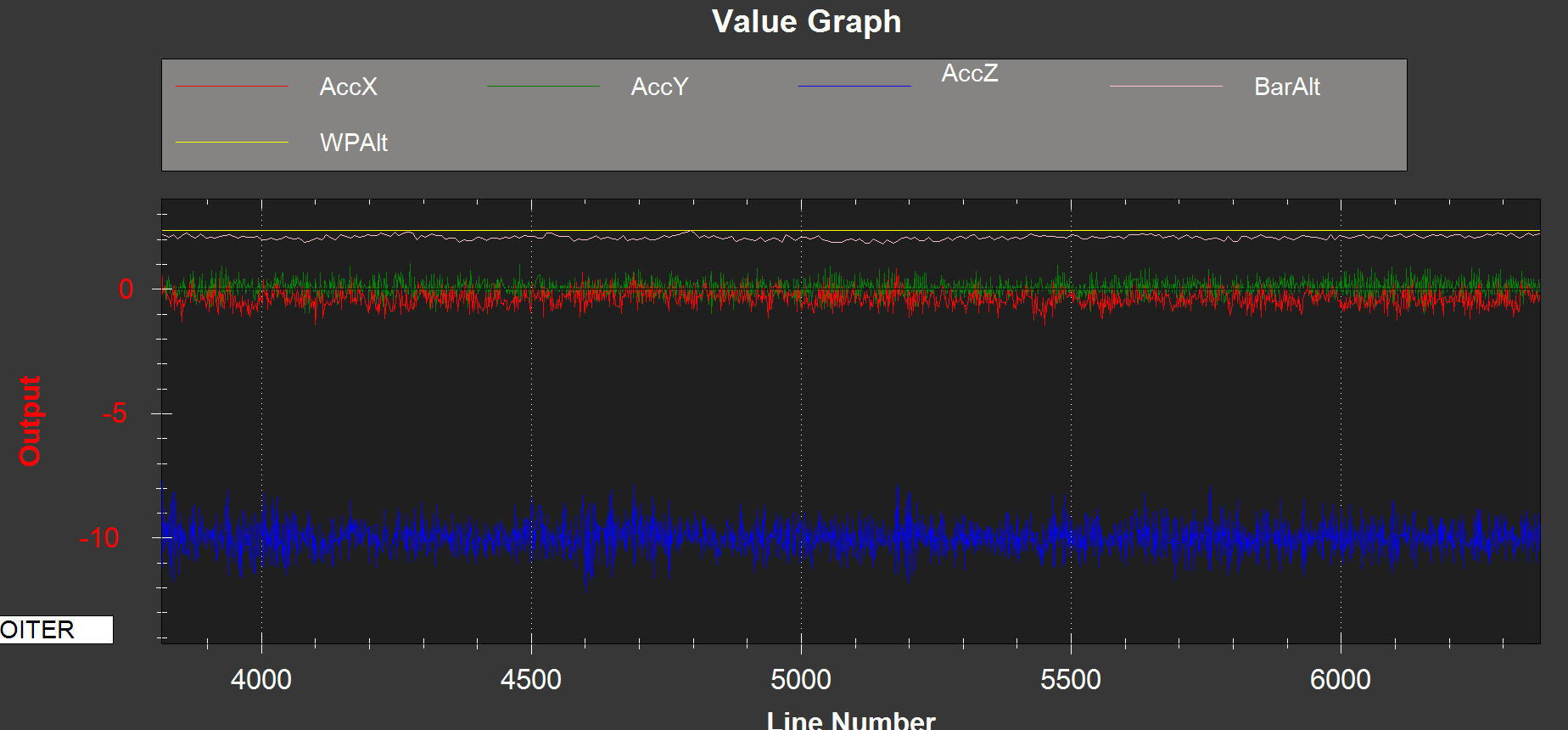
лог
www.dropbox.com/s/8s64px3f9o00moo/good.log?dl=0
Сегодня пошел, даже в стабе коптер не управляем. Так и хочет куда нибудь бросится. Логи показали повышенное, но вроде в пределах нормы вибрации, и резонансы.
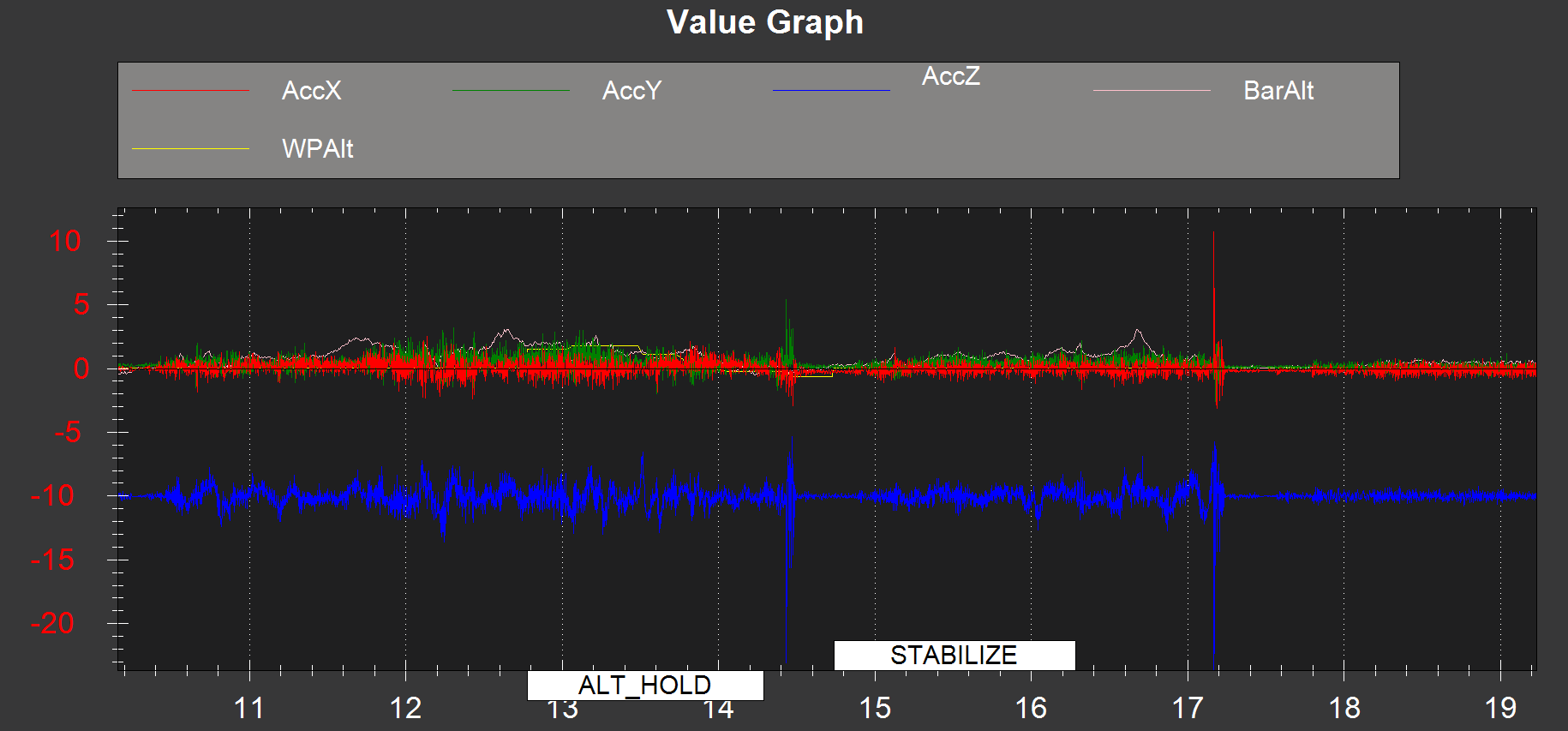
лог
www.dropbox.com/s/28rqtyxl45yvioz/bad.log?dl=0
На первом вылете кривая высоты была ровная а на втором скакала как бешеная. Поролонка имеется. Закрывает половину платы. Поролонка черная. Плата в корпусе. Свет пропускает корпус. Сегодня разобрал все и оклеил изнутри черной изолентой.
Летал оба раза примерно в одно и то же время. Там где лог красивый ~13 00, где ужасный ~15 00.
Конфигурация коптера была абсолютно одинакова.
Блин если это чудо не полетит до следующей ЗП, точно удушу жабу и покупаю назу 😃
Плата в корпусе.
Если плата в корпусе, то поролонку не надо. Сам так нарвался. Постоянно подвизгивал движками вися на месте. Убрал поролонку с баро, все прекратилось.
У тебя телеметрия подключена?
Телеметрия подключена а OSD не подключал, пока не планирую на нем делать FPV полёты. Колечко обязательно поставлю, это был первый день полётов с АРМ и пока дома разбирался с записью телеметрии её случайно уничтожил, так что теперь только догадки.
вот дежавю: первый полет квадрика повисел 2-3 минуты и полез вверх, я не стал ничего делать. Он полез вверх потом приземлился и успокоился. у меня версия была такой, что выставляя напряжения возврата на точку при проседании батарейки я завысил напряжение и режим сработал, аппарат поднялся на 15м и приземлился. Как только занизил этот параметр все стало на свои места. Вот как раз переключения режимов и выводит аппарат из RTL, что и очень похоже на ваше описание.
Да тоже прихожу к выводу что что-то связано с включением RTL, на следующий день летал с другой батарейкой и этого небыло, поставил ту батарейку что в первый день и на ней после 4 минут полета была просадка напряжения ниже 10 вольт а у меня в Fail Safe выставлено 10.5 вольта. Вчера при просмотре телеметрии это увидел и уже поменял на 10.0 вольт а эту батарею только для самолёток своих, она уже не первой свежести. Просто первые вылеты и когда он стал лезть в верх и не слушаться управления запаниковал но вовремя очухался и стал переключать режимы. А вообще-то АРМ класный контролер, особенно понравился “Забор” и приземление, идеальное, мягкое, ни каких подскоков, коснулся земли и моторы выключил. Объязательно сниму этот процесс. Осталось освоить и облетать полёт по точкам и тогда буду дальше оснащать для FPV/
точно удушу жабу и покупаю назу
Да в ветке по назе тоже “стена плача”, и подобные заявления проскакивают.
По делу, думаю что проблема в температуре, стало холоднее/теплее и демпферы изменили свои свойства, отсюда и вибрации. …ну как вариант.😃
Сегодня решил протестить все системы квадрокоптера пролежавшего после лета, дабы не забыть как все работает )) И вот нашел разочарование в mini OSD, наложение текста работает нормально, а изображение не поступает, просто серый экран. На прямую камера работает. Хлипкая вещь все таки. Может кто подскажет что сделать можно, ну или где купить нормальную?
Жил себе трикоптер Trifecta на мозгах Micro HKPilot Mega Master Set. Отлично летал на 3.2 прошивке. Другой никакой не нюхал. И тут мишнпланер предложил обновиться на 3.2.1. В релиз ноутсах большими буквами написано, что все настройки после обновления с 3.2 сохранятся и менять их нет необходимости. Угу. Обновился. Результат
- Расколбас по всем осям и нелетабелен совсем - уменьшил ПИДы чуть ли не вдвое.
- Перестал отображаться правильно ток потребеления в планнере.
- Коптер стал подвисать во время арма. Раз и 10.
Человеки, подскажите как правильно поступить?
- Найти hex прошивки 3.2 rc14 (если да, то где?)
- Откомпилить ее самому в ардуино
- Залить то что предлагает мишнпланнер в пункте pick previous firware? там максимум 3.1.5
подскажите пожалуста, ссылку на архив с различными версиями Миссионпланер