А давайте обсудим Arducopter - APM

Подскажите как настроить подвес тарот-Т2D на разъем А11 чтобы можно было управлять камерой по 6,7или 8каналу.
copter.ardupilot.com/wiki/com…-tarot-gimbal/
но это к питхавку, а если к ардукоптеру? я сервы подвеса на 10 и 11 каналы запитал, как их прописать теперь?
но это к питхавку, а если к ардукоптеру? я сервы подвеса на 10 и 11 каналы запитал, как их прописать теперь?
Вот с этого места
Set-up through the mission planner.
Там дальше картинка есть.
Плюс вот это почитать:
copter.ardupilot.com/…/common-camera-gimbal/
Вот с этого места
Set-up through the mission planner.
Там дальше картинка есть.
Я понимаю:) Но это будет работать только в том случае если сигнал идет с PINов 6,7или 8го канала, я же хочу повесить на 10 или 11. Или он дают сигнал с гироскопа на выравнивание камеры?
Я понимаю:) Но это будет работать только в том случае если сигнал идет с PINов 6,7или 8го канала, я же хочу повесить на 10 или 11. Или он дают сигнал с гироскопа на выравнивание камеры?
я сервы подвеса на 10 и 11 каналы запитал
Ничего не понял… 😃
Ну так выход это А10 и А11, а вход с приемника это 6-8. Вы же спрашивали про выходы?
Как АПМ подключен? PPM или PWM?
Т.е. вы хотите 6-8 каналы оставить? Так вряд ли получится.
А почему напрямую с приемника не хотите управлять?
И да, АПМ не может управлять подвесом на БК моторах. Управлять - стабилизировать, поворачивать.
Только подвес на сервах.
Можно использовать АПМ как дешифратор PPM/Sbus в PWM. В таком случае входящие каналы будут 6-8, а контроллер подвеса подключается к А10-А11. В настройках галку стабилизации подвеса надо снять. И крутилкой с аппы можно будет поворачивать подвес. Т.е. каналы 6-8 будут транзитом подаваться на А10-А11. Как то так.
Но делать это надо, только если у вас в приемнике мало каналов - до 8 и он подключен по 1 проводу (PPM/Sbus). В остальных случаях лучше подвес подключать напрямую к приемнику.
Можно использовать АПМ как дешифратор PPM/Sbus в PWM. В таком случае входящие каналы будут 6-8, а контроллер подвеса подключается к А10-А11. В настройках галку стабилизации подвеса надо снять. И крутилкой с аппы можно будет поворачивать подвес. Т.е. каналы 6-8 будут транзитом подаваться на А10-А11. Как то так.
Вот теперь все предельно понятно:) Спасибо!!!
Стабилизацию можно оставить, стабилизация корректирует болтание коптера (в определенных пределах) и управлению не мешает
Стабилизацию можно оставить, стабилизация корректирует болтание коптера (в определенных пределах) и управлению не мешает
Зачем, если у подвеса свой процессор и свои датчики?
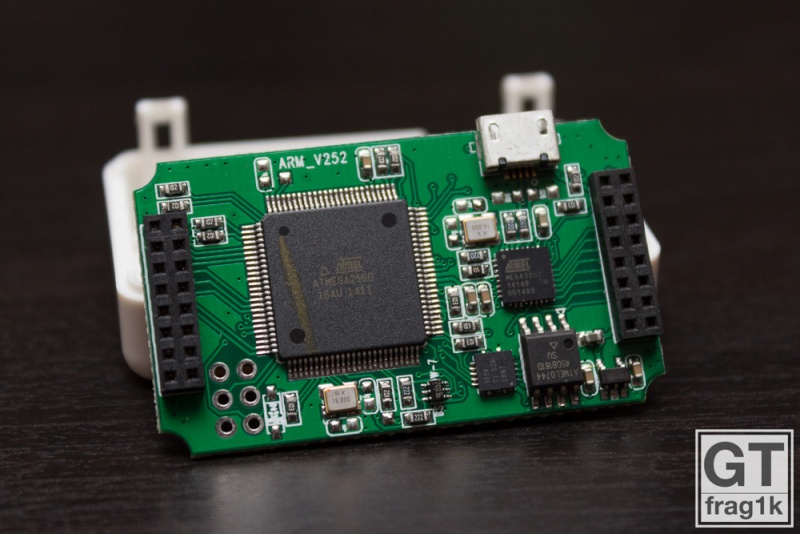
подскажите ! контроллер вот такой
разъёмы вот
Куда мне подключить APM Power Module
Не похож он на АРМ. Можно ссылку, откуда прибыл? По внешнему виду это плата с датчиками.
Сайт ardupilot.com у всех не резолвится?
Не похож он на АРМ. Можно ссылку, откуда прибыл? По внешнему виду это плата с датчиками.
Это скорее всего от Валькеры мозги. Угадал? 😉
Клон АПМ кастрированный.
Подключать надо на ноги процессора ИМХО.
Лучше спросить в теме Валькеры 350 (если это от нее мозги)
Это скорее всего от Валькеры мозги. Подключать надо на ноги процессора ИМХО.
Это мозги от
cheerson cx-20 www.ebay.com/itm/221732542128
Дело в том, что я не вижу на фото мозг. Аксель, баро и компас есть, мозга нету. Может есть еще одна плата в коробочке?
Посмотрел multicopterwiki.ru/index.php/Файл:IMG_4366.jpg - похоже, действительно на процессор.
Это мозги от
cheerson cx-20 www.ebay.com/itm/221732542128
Ну там и спросите. Тема есть. Быстрее ответят.
Может есть еще одна плата в коробочке?
Там 2 платы. Сам контроллер на внутренней стороне.
Подключать надо на ноги процессора ИМХО.
А по другому никак ? А то тз меня пайщик некудышный !
А по другому никак ? А то тз меня пайщик некудышный !
Ну я же написал - тема по чирсону есть! Спросите там! Быстрее ответят! Может есть какой то другой способ подключения.
Ну я же написал - тема по чирсону есть! Спросите там! Быстрее ответят! Может есть какой то другой способ подключения.
Из той темы меня народ посылают сюда !
Из той темы меня народ посылают сюда !
У вас не совсем АПМ, точнее он обрезан. Тут обсуждается полноценный АПМ. Вряд ли кто ответит. Хотя чем черт не шутит…
Скорее всего на ноги сразу паяться надо, порта для ПМ нет.
Спасибо будем ждать !
Исходя из multicopterwiki.ru/index.php/Cheerson_CX-20 датчик тока как и осд туда не предусмотрены, так что только “колхоз”
Исходя из multicopterwiki.ru/index.php/Cheerson_CX-20 датчик тока как и осд туда не предусмотрены, так что только “колхоз”
понял!