А давайте обсудим Arducopter - APM

В общем проблемка у меня никак немогу заставить коптер летать в режиме лоитер. В стабилайзе весьма хорошо весит, чуть только уводит в бок. А если включить лоитер или возврат домой то либо летит неизвестно куда , либо начинает круги накручивать с увеличением радиуса. Колибровал компас несколько раз , не помогло. Подскажите что быть может и как исправить. Может варианты настроек , прошивки или еще что-то.
В общем проблемка у меня никак немогу заставить коптер летать в режиме лоитер. В стабилайзе весьма хорошо весит, чуть только уводит в бок. А если включить лоитер или возврат домой то либо летит неизвестно куда , либо начинает круги накручивать с увеличением радиуса. Колибровал компас несколько раз , не помогло. Подскажите что быть может и как исправить. Может варианты настроек , прошивки или еще что-то.
Сверять показания компаса с картой, чтобы верно показывал направление. Проверять правильно ли установлен модуль GPS/компаса. Должен быть керамической антенной GPS вверх.
Может варианты настроек
компассмот делал?
компассмот делал?
Нет. Про это в виео и темах по настройке небыло сказано. Как сделать?
В общем проблемка у меня никак немогу заставить коптер летать в режиме лоитер. В стабилайзе весьма хорошо весит, чуть только уводит в бок. А если включить лоитер или возврат домой то либо летит неизвестно куда , либо начинает круги накручивать с увеличением радиуса. Колибровал компас несколько раз , не помогло. Подскажите что быть может и как исправить. Может варианты настроек , прошивки или еще что-то.
примерно та же история. Но вот тут начал читать, hobby.msdatabase.ru/project-updates/…/arducopter Много что нового открыл. правда работаю ещё над этим, но уже ошибки видны. Хотя и компассмот тоже надо смотреть.
Как сделать?
в старых прошивках через терминал… в новых не пробовал.
без этого компас будит чудить в полете.
Как сделать?
на предыдущей странице ответ
Колибровал компас несколько раз , не помогло.
Мало что-либо калибровать - надо научиться проверять результаты своей работы - не всегда сразу проявляются ошибки. (лучше не соскребушками … 😒)
В общем проблемка у меня никак немогу заставить коптер летать в режиме лоитер. В стабилайзе весьма хорошо весит, чуть только уводит в бок. А если включить лоитер или возврат домой то либо летит неизвестно куда , либо начинает круги накручивать с увеличением радиуса. Колибровал компас несколько раз , не помогло. Подскажите что быть может и как исправить. Может варианты настроек , прошивки или еще что-то.
Для начала попробуй елементарное. Коптер сам собирал? положение компаса какое? Пока не выставишь в настройках МП правильно, ни компасмот, ни калибровка, не поможет.
Что за модуль ЖПС-компас, как стоит, какие настройки в МП?
компассмот делал?
как я понимаю сделать его не могу, так как у меня нет телеметрии , а от усб тоже не смогу так как апм питаю от регулей и одновременно усб и аккум вроде как подключать нельзя.
Для начала попробуй елементарное. Коптер сам собирал? положение компаса какое? Пока не выставишь в настройках МП правильно, ни компасмот, ни калибровка, не поможет.
Что за модуль ЖПС-компас, как стоит, какие настройки в МП?
да собрал сам, гпс должен быть ublox neo6m но на нем написано hextronik (или так и должно? просто брал на форуме) стоит керамикой вверх . ну и расположен все как по инструкции , стрелкой по направлению с контроллером. + появилась новая надпись EKF vibe что это ?
как я понимаю сделать его не могу, так как у меня нет телеметрии , а от усб тоже не смогу так как апм питаю от регулей и одновременно усб и аккум вроде как подключать нельзя.
Так в чем проблема? Вытащить +5м (красный провод) из всех колодок от регулей. И можно питать от USB.
Но вообще я никогда не делал компасcмот с вынесены на ноге компасом и как-то никогда проблем из-за этого не возникало. В точке висит как вкопанный (если достаточно спутников), работой RTH тоже доволен.
Кстати, стоит проверить, чтобы компас был правильно установлен. Т.е. передней стороной вперед. Я по фоткам не смог понять, есть ли на корпусе метка. Правильность можно проверить опять же по карте. Например ставишь коптер в сторону окна, находишь на карте свой дом и смотришь куда смотрят окна, сверяешь угол.
как я понимаю сделать его не могу, ?
все возможно. Я взял кабель ЮСБ, распотрошил его и перекусил красный провод плюса. Так я получил кабель для компасмода.
Второе. У тебя жпс не штатное. тебе нужно положение компаса правильно показать в мишен планере. Вкладка компас.
Потому как у тебя может стоять валкеровское положение. Поекспериментируй.
Я с таким модулем помучился, пока не выставил.
вот стаття apmcopter.ru/…/vneshnijj-kompas-kak-rasp.html
удачи
да собрал сам
Компасмот врядли поможет в вашем случае, внешний компас на штанге без оного работает нормально обычно…
Что может быть и что нужно проверить:
1)Действительно ли внешний компас используется, на апм там дорожку вродь на плате нужно было резать и т.д., проверить можно просто, при подключенном мишн планере взяв гпс модуль в руку и покрутив оный как компас, если будет реакция компаса в мишн планере то ок, нет - значит внутренний работает и тогда нужно смотреть как на вашей плате подключить внешний компас.
2)Проверить уровень вибраций(включить лог вибраций в настройках), при сильных вибрациях все авторежимы будут глючить, а у вас я вижу пропы не очень и моторы похоже тоже не из качественных, так что вибрации могут быть очень сильными.
3)Сам модуль гпс+компас неисправен, тем более что покупался с рук… у меня был гпс модуль такой, полудохлый, вел себя примерно так же…
пока пробую выполнить и проверить все выше сказанное, такой вопрос: когда калибрую компас у меня всегда значения с минусом все три, так и должно быть ? просто на видео у людей значения в плюсе. и еще один вопрос , на карте в мисион планере , коптер показывает три лини , красная желтая и черная, так вот красная и желтая совмещены и смотрят в одну сторону, а черная совсем в другую и постоянно перемещается (скачет ) и это как раз gps, так и должно быть?
Напишите какие у вас значения получаются
Я не обращал внимания никогда на это, сейчас проверил, на обоих компасах 2 значения с минусом получатся, как по теории допустимо я не знаю.
“скакать” ничего не должно точно если коптер стоит на земле например…
Мне вот интересно стало, если коптер переворачивается вверх тормашками моторы так и должны вставать на минимальный газ ?
Просто я тут летал в альтхолде ветер, летел против ветра и при остановке коптер перевенуло и он вертикально в землю вошол, в стабилайз я переключил, но реакции не было.
Домой пришел, проверил, все работает.
Напишите какие у вас значения получаются
Я не обращал внимания никогда на это, сейчас проверил, на обоих компасах 2 значения с минусом получатся, как по теории допустимо я не знаю.“скакать” ничего не должно точно если коптер стоит на земле например…
Примерно -97 - 8 -5. Сверил компас. Коптер смотрит точно в нужном направлении. Тоесть красная и оранжевая полоса. А черная скачет по кругу. Подключил это дело все от усб и без всего лишнего. Только контроллер и гпс
Мне вот интересно стало, если коптер переворачивается вверх тормашками моторы так и должны вставать на минимальный газ ?
Вообще все “реакции” (а заодно и “предплётную” готовность) оч просто проверить дома без попов - заармил и крути - верти (в руках) - переключай режимы (по ОСД , например просматривая). Если при наклоне звук движков не меняется (или начинают отрабатывать не те) - надо искать засаду.
Вообще все “реакции” (а заодно и “предплётную” готовность) оч просто проверить дома без попов - заармил и крути - верти (в руках) - переключай режимы (по ОСД , например просматривая). Если при наклоне звук движков не меняется (или начинают отрабатывать не те) - надо искать засаду.
коптер 10 полетов сделалиперед этим, при наклоне реакция была нормальная, переворачивать не пробовал
Привет, вопрос не совсем про ардукоптер, а про питание и мониторинг к нему. Pixhawk + Power module что в комплекте шел, возможно не совсем оригинальный.
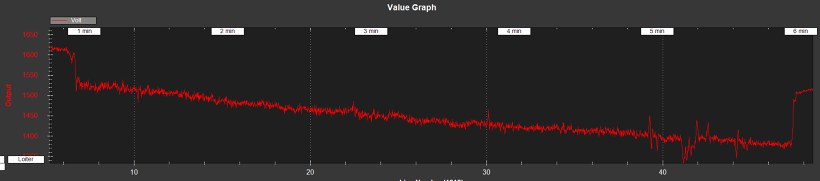
Сегодня тестировал с целью тюнинга показаний тока, но выяснилось что и с напряжением нелады. Подключал батарею через ваттметр вот такой к коптеру:

С подключенной батареей на земле напряжение показывает верное. Но при нагрузке (около 30А) показания на ваттметре и в мониторинге начинают отличаться примерно на 0.8В. На ваттметре напряжение падает незначительно, на 0.2В примерно, а в мониторинге - на 1В.
Батарея на http://fotkidepo.ru:
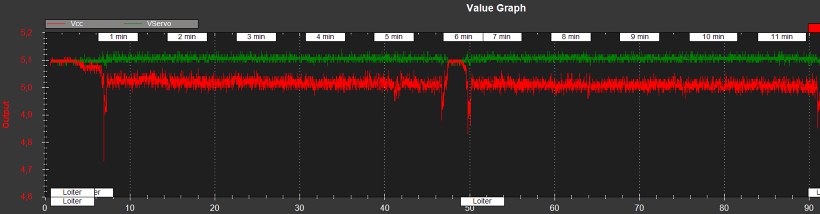
Pixhawk дополнительно запитан через отдельный БЭК на 5В на сервоприводы, для надежности. Мониторинг показывает провал основного питания при взлете на, при этом напряжение на сервах остается в том же диапазоне.
Питание на http://fotkidepo.ru:
В результате квадр летает меньше, начинает раньше времени садиться по FAILSAFE_BATT.
Сначала я думал, что это из-за слабой батареи, и новые 16Ah спасут ситуацию, просадка будет меньше. Но сейчас понимаю, что так будет и с новой батареей.
Мне основной источник питания надо менять с платой измерения питания, или дело не в них?
непонимаю в чем проблема. И главное многие тут жаловались. попытался воспроизвести у меня не получилось беру прошивку ардукоптер 3.2 (беру свою сборку с поддержкой нмеа, если кто то мне объяснит чем лучше 3.2.1 - соберу и ее) -делаю сброс парамтров, настраиваю датчик вольтажа и тока, нажимаю кнопку включить осд -в осд шью показавшую себя стабильной minim osd copter extra 22, шью из 22 утилиты, шью туда шрифты от 22, из меню делаю сброс по дефаулту параметров, настраиваю индикаторы как мне удобно. - соединяю по трем проводам, без модема - питаю не от юсб (при юсб телеметрии не будет), питаю от батареи смотрю в монитор - вижу вольтаж в адеквате, горизонт работает
Делаю тоже самое по пунктам. Исключая прошивку - прошил просто 3.2 из планнера. Подключаю очки - вижу горизонт в адеквате, напряжения все так же не показывает.
Не показывает напряжение, направление на дом, расстояние до дома, количество спутников. Показывает высоту, скорость вертикальную и горизонтальную, горизонт.
При этом гпс работает - автовозврат адекватен, лойтер и посхолд работают прекрасно.