Crius Hobby MultiWii

вот еще кое-что rcopen.com/forum/f123/topic276908
Сегодня я окончательно настроил квадр + поменял подшипники моторов. Всё стало прекрасно что в акро что в лвл моде. Можно было бы переходить на настройку барометра. Но на исходе 4го акка оторвало лопасть с долбанного RCtimer 10x4.5 ((( В результате движок подклинивает(
Возникла такая проблема, как начинающему разобраться самому не получается
плата MultiWii SE
Вот запуск 1 в конфигураторе - акселерометр отключен
реакция газа на стики примерно пропорциональна
хотя после нескольких операций с другими стиками уходит вот так (квадрик как стоял так и стоит,его не трогал - только стики)
Если “запускаюсь” c включенным акселерометром - такая картина
В чем может быть проблема ???
calib_acc - нажимал - по стрелочкам уровни вроде стоят
может надо подогнать к 1500 каналы (кроме газа) ?
Помогите! Доигрался с паяльником, потерял R5 (над желтым проводом). Подскажите на сколько он там?
может надо подогнать к 1500 каналы (кроме газа) ?
HK-T6A точно не получается - все время немного уходит
сейчас в config.h установил
#define DEADBAND 12
Может проблема с вибрациями -
можно приклеить плату на такую штуку - тут ???
Помогите! Доигрался с паяльником, потерял R5 (над желтым проводом). Подскажите на сколько он там?
Возле светика 330 ОМ
Вот
вопросов не убавилось, интересует конкретно CRIUS CE с удержанием высоты, сонаром, блютусом…
нужен FAQ WIKI …
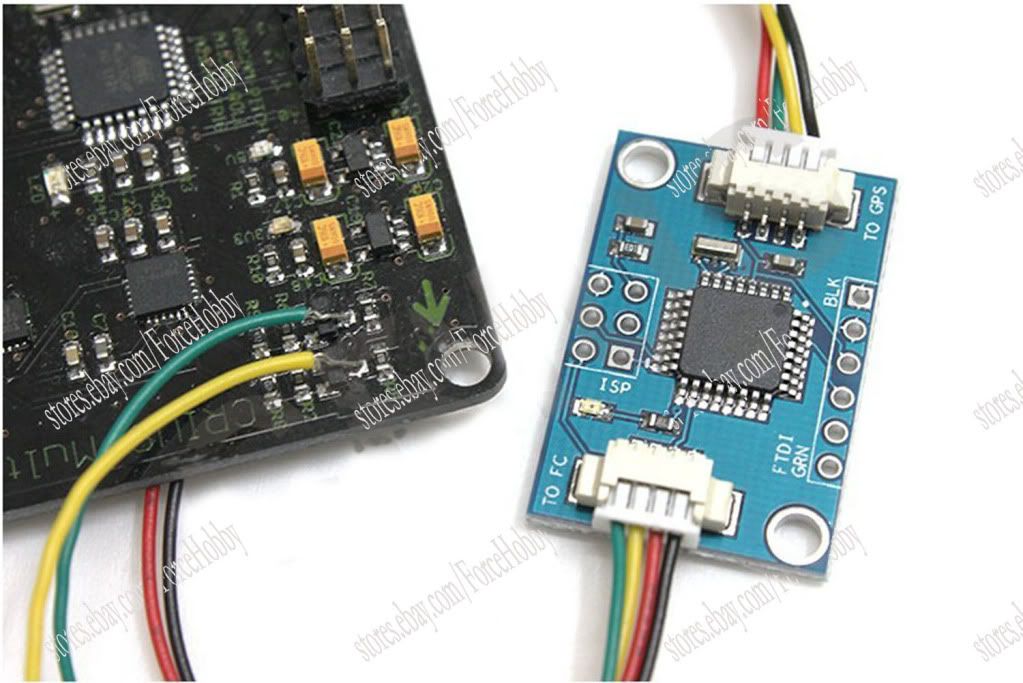
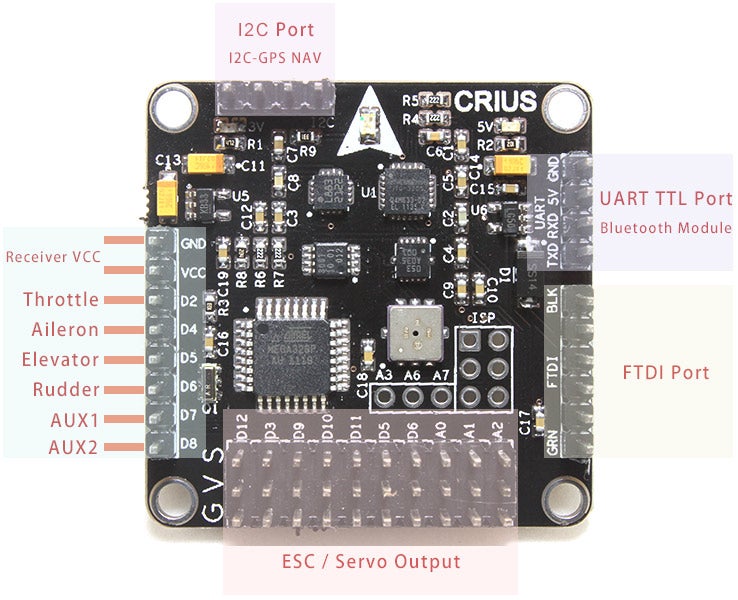
Вот схема подключений для Криуса:
и еще…
А вот я спрошу по-чайниковски. Что крутить, когда при резких манипуляциях стиками тухнут моторы? Не все, а какой-либо останавливается. Через секунду конечно аксель и гиры его наставляют на путь истинный, но как-то некрасиво все это.
Выставить минимальный газ(minthrottle) так, чтобы при “возведении” коптера в боевое положение(холостой ход) моторы медленно, но уверенно вращались. По-началу, я сделал значение низким (моторы даже не вращались), коптер летал, но при резких раскачках падал, добавил - теперь наоборот вверх стремится.
В чем может быть проблема ???
не в чем = все нормально 😃
С гириком она I накопила, после махания правым стиком.
С акселем тем более - плата то не в горизонте.
Недавно стал обладателем этой платы версии Lite.
Прошил 2.1 на Arduino 1.0.1 под XCopter
Появилась пара вопросов:
- Конфигуратор видит плату только после прошивки, если переподключить её, то не видит. (точнее не видит в 8/10 попыток 😃)
- Через раз, после конфигурации, уплывает горизонт и никакая калибровка датчика не помогает. Четкой логической зависимости не выявил, но пологаю это как то связано с РУ и тем что от неё приходит во время конфигурации.
- Почему при “сбросе” горизонта, в GUI видно разницу в сигналах на движки? “Плавает” не сильно, около 100, но все же непонятна причина (остальные каналы в 1500 ±5 мертвая зона 10) Проблема такая же как в посте rcopen.com/forum/f123/topic258132/1929 только у меня не такая большая разница.
- Что делает экспонента в GUI? Она только для стабилизации? Или для сигнала в целом? (если вдруг аппа не поддерживает)
Спасибо!
- Почему при “сбросе” горизонта, в GUI видно разницу в сигналах на движки? “Плавает” не сильно, около 100, но все же непонятна причина (остальные каналы в 1500 ±5 мертвая зона 10)
Система регулирования при отрубании физичкой обратной связи(коптер не летит) всегда “сядет” на край регулирования, вопрос только во времяни. Не надо на эти столбики смотреть.
- Что делает экспонента в GUI? Она только для стабилизации? Или для сигнала в целом? (если вдруг аппа не поддерживает)
Экспонента как раз для стиков. На стабилизацию PID-ы влияют.
Подскажите, как можно на MWC SE подключить AUX3 и AUX4
Taatarenkoff сам искал насчет пищалки, никто не ответил, а найти удалось только одно - buzzer D8, а failsafe работает хорошо, у меня турнига, в ней нет failsafe на родном приемнике, но мозги отлично справились с задачей. В бою не проверял, но на земле работает 😃 MWC SE v1.0 firmware 2.1
buzzer D8, а failsafe работает хорошо, у меня турнига, в ней нет failsafe на родном приемнике, но мозги отлично справились с задачей. В бою не проверял, но на земле работает MWC SE v1.0 firmware 2.1
За пищалку спасибо. А вот с failsafе не совсем понятно. У меня у самого туринга поэтому докупил девайс, а что с ним делать непонятно. А вы я так понимаю настроили програмный сейф в самих мозгах?
Taatarenkoff пожалуйста 😃 я с пищалкой не разобрался, купил монитор в балансирный разъем.
Насчет Вашего девайса, ничего не подскажу, Вы верно подметили, настроил failsafe в мозгах, удивился, что он работает. Как поставлю новые регули, надеюсь, проверю на практике 😃
Люди, что за фигня )
В ГУИ аксель нормально работает и показывает все правильно. Но в реале, он видит горизонт несколько в другой плоскости.
Попробовал уже 2.1; 2.0; 2.0_а0 прошивки )
Стоит отключить горизонт, один двиг тянет сильнее. Казалось бы дело в калибровке регуляторов, но стоит отключить плату и воткнуть регули напрямую в приемник, движки работают нормально…
А вот с failsafе не совсем понятно. У меня у самого туринга поэтому докупил девайс, а что с ним делать непонятно.
Я себе прикупил такую вещицу, включил в разрыв в канал газа, настроил уровень газа при срабатывании. При потере сигнала приемник ничего не выдает и тут срабатывает failsafe выдавая в канал газа запрограммированное значение. Настроил его на очень быстрое снижение.
Я себе прикупил такую вещицу, включил в разрыв в канал газа, настроил уровень газа при срабатывании. При потере сигнала приемник ничего не выдает и тут срабатывает failsafe выдавая в канал газа запрограммированное значение. Настроил его на очень быстрое снижение.
Снижение при потери сигнала можно и в стоковой прошивке настроить:
#define FAILSAFE // Alex: comment this line if you want to deactivate the failsafe function
#define FAILSAVE_DELAY 10 // Guard time for failsafe activation after signal lost. 1 step = 0.1sec - 1sec in example
#define FAILSAVE_OFF_DELAY 200 // Time for Landing before motors stop in 0.1sec. 1 step = 0.1sec - 20sec in example
#define FAILSAVE_THR0TTLE (MINTHROTTLE + 200) // Throttle level used for landing - may be relative to MINTHROTTLE - as in this case
Настраивал пару дней назад буззер, что-то так и не понял как он работает, постоянно пищит секунду через секунду, в вики про это говорится что выполнена калибровка АСС, но я его не трогал. Поставил галочку в ГУИ, там все прекрасно работает, кручу AUX и там отображается срабатывание, а реально я не знаю от чего он пищит, изменения реакции не заметно.
Это можно в стоковой прошивке настроить:
Да я знаю, не охото было заморачиваться при наличии железки, да и на airm.ru как-то предостерегающе про эту функцию написано.
А можно ли пищалку настроить на срабатывание failsafe?
serenya я проверял на земле, все работает прекрасно. Несколько раз тестил 😃 но в воздухе другое дело. дождусь регули - рискну, проверю 😃
Здесь описаны сигналы пищалки:
Failsafe landing active: SLL,S (repeat).
Но как настроить не разбирался. Сейчас вообще запутался в чем разница 1 и 4 пункта по вышеприведенной ссылке.
посмотрел в config.h, там нет никакой связи buzzer и failsafe, но так как сигналы как-то определены я делаю вывод что они будут по умолчанию работать.
UPD во время прошивки GPS модуля лезет вот такая ошибка, может нужно обновить основную прошивку модуля? Нажмите на изображение для увеличения Название: error.jpg Просмотров: 131 Размер: 20.6 Кб ID: 684074
Геннадий, подскажите какой программой и какой прошивкой вы прошивали это GPS?
Парни, всем привет! Тестирую прошивку 2_0_a0. Вопрос : подскажите плизз где сменить в конфиге направление компаса? А то стрелка смотрит на Юг вместо севера. Или может кто нибудь отправить почитать в правильном направлении? Спасибо!