Полетный контроллер DJI Naza M v1

И еще почему такая индикация в конце,в чем может быть проблема,что за ошибка?
Типа вот таких: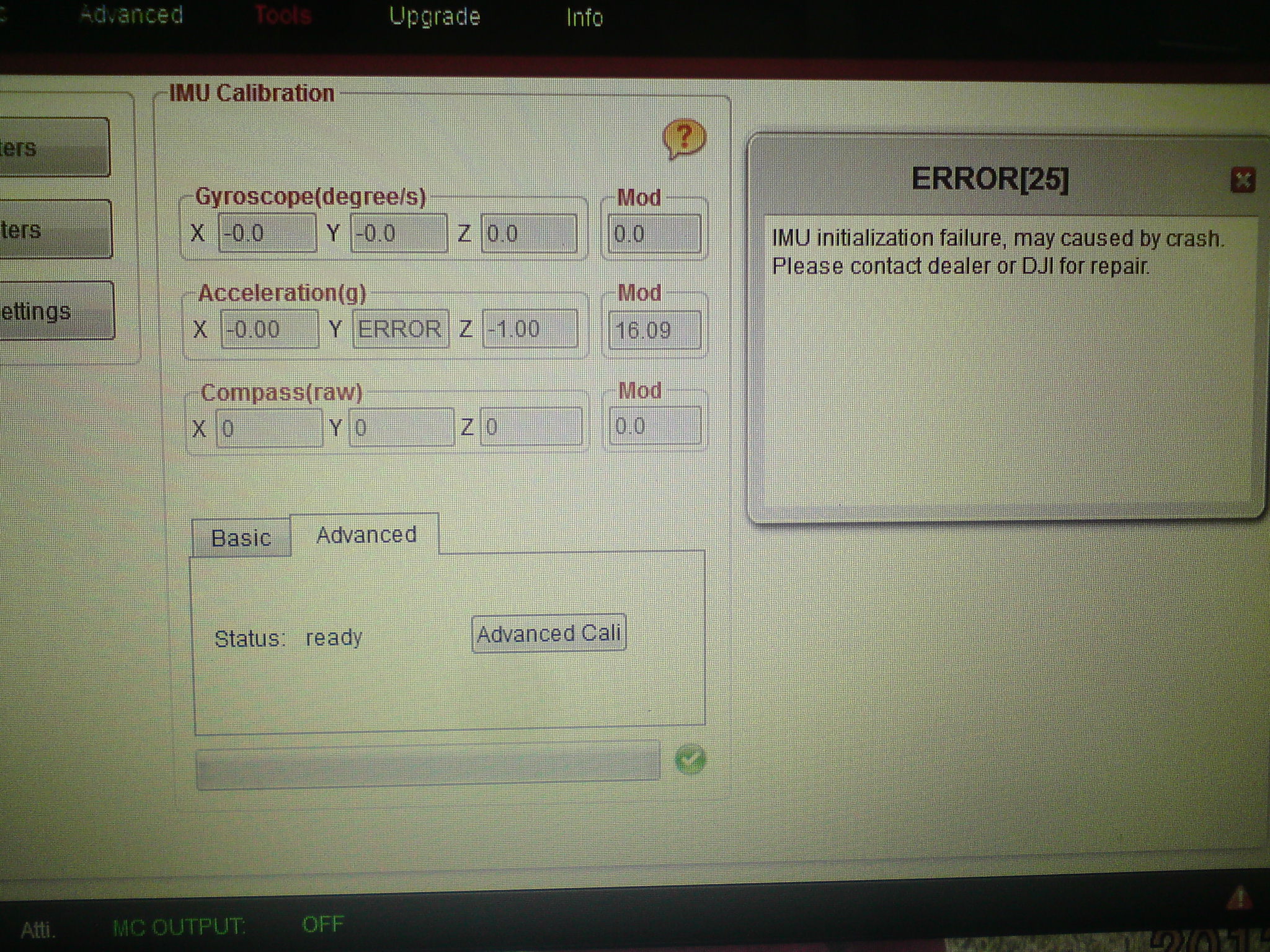
И еще почему такая индикация в конце,в чем может быть проблема,что за ошибка?
Надо почитать на сайте где от куда скачивал программу. Там есть
А в меню TOOLS при калибровке никаких ошибок не выдает?
нет,калибровка нормально проходит,без ошибок.
что то ещё проскакивало у меня,плохо помню уже, у меня не включался режим Intelligent Orientation Control , галочка не ставилась и ГПС не работал. Это где то я не так поставил Intelligent и Immediately помоему.
а эффективный материал для чехлов что можно подобрать , может кто опытный[
Летаю много лет на самиках в любой мороз,делаю типа чехла (обворачиваю и с торца вставляю заглушки тоже из потолочной плитки) обмотав скотчем
что то ещё проскакивало у меня,плохо помню уже, у меня не включался режим Intelligent Orientation Control , галочка не ставилась и ГПС не работал. Это где то я не так поставил Intelligent и Immediately помоему.
вспомните,пожалуйста)
у меня не включался режим Intelligent Orientation Control
дело в том,что меню это совсем не активно
дело в том,что меню это совсем не активно
У меня IOC не включался до того, как был откалиброван компас. При этом Ассистент сообщал о неоткалиброванном компасе как об ошибке.
У меня IOC не включался до того, как был откалиброван компас. При этом Ассистент сообщал о неоткалиброванном компасе как об ошибке.
ошибку эту ассистент не выдает
существует ли какое то обнуление,сброс на назе?
да, молотком сверху
Напиши поэтапно, как мигает лед при включении, какими цветами? Реагирует ли он на переключение режимов,Атт - желтым, гпс - зеленым? Я завтра посмотрю в факе
сейчас видео выложу
гпс - зеленым
при переключении в GPS ползунок переходит,но остается в А
в А моргает одиночными желтыми,в ФС быстрыми желтыми,в М не моргает
Всем привет, после долгих мучений с выбором таки приобрел первую назу без GPS, попробовал, все понравилось и управляется легко, но не совсем понятны две вещи, во первых квадрик постоянно куда-либо ведет, а если немного компенсировать стиками уход, то дальше коптер движется как бы по инерции, и приходится его постоянно ловить, грешу на не совсем ровные лучи, так как брал квадрик в сборе с рук, можно ли это как-либо в настройках компенсировать? Потому как если есть небольшая нессиметричность в работе ВМГ, то как я понимаю его все время будет вести как в и в случае с кривыми лучами. И второй нюанс, можно ли убрать писк моторов, особенно не мешает, но он громче чем шум от винтов и воздуха, регуляторы стоят штатные на 30 ампер, моторы и винты тоже. Если где-то уже написано об этом ткните пожалуйста пальцем)
Простите, а как квадрик без GPS может никуда не вести? Он просто “скользит” в пространстве повинуясь Вашим стикам.
Во вторых у Вас выкос (примерно 5 градусов) двигателей к центру рамы сделан?
Простите, а как квадрик без GPS может никуда не вести? Он просто “скользит” в пространстве повинуясь Вашим стикам.
Во вторых у Вас выкос (примерно 5 градусов) двигателей к центру рамы сделан?
Выкос? Наверное нет, рама штатная 450-я, можно более подробно о том, как это лучше сделать?
Выкос? Наверное нет, рама штатная 450-я, можно более подробно о том, как это лучше сделать?
На 450 выкос сделать сложно.
Я летаю на “Тарот 650”
На 450 выкос сделать сложно.
Я летаю на “Тарот 650”
Что дает такой выкос? Более стабильное висение в точке? а ваши моторы тоже свистят?
Выкос как по мне - это что-то типа воздушная воронка. Мне кажется, что с выкосом электронике легче удерживать коптер неподвижно в точке.
Моторы не свистят.
Выкос как по мне - это что-то типа воздушная воронка. Мне кажется, что с выкосом электронике легче удерживать коптер неподвижно в точке.
Моторы не свистят.
Вам кажется, или это на самом деле так?