CRIUS ALL IN ONE PRO Flight Controller

Попробую на RC2 твоей запустить её.
RC2 на базе 2.1… кореш пробовал и вроде как статусы не всех элементов отображается на экране… попробуйте…
скоро думаю update на 2.2_RC3 будет 😉 как обычно почти все готово, кроме описания… аксель+гпс с большего дописал тоже, но пока не получается хорошо настроить да и погоды толком небыло… потому если релиз и будет скоро, то аксель+гпс фишка скорее всего как экспериментальная выйдет, т.е. на попробовать…
Можно ли с помощью этой платы каким-то образом задавать движение квадрокоптера не имея GPS? т.е нужно попасть из одной точки в другую. Я так понимаю, что этой можно сделать, ориентируясь на время. Мне еще тут утверждают, что это можно реализовать использую встроенный HMC5883L 3-осевой цифровой магнитометр, ориентируясь только по магнитному полю…Возможно?
оффтоп… почитайте про принципы инерциальных систем навигации… если коротко, то на мемс сенсорах без корректора аля гпс это невозможно…
RC2 на базе 2.1… кореш пробовал и вроде как статусы не всех элементов отображается на экране… попробуйте…
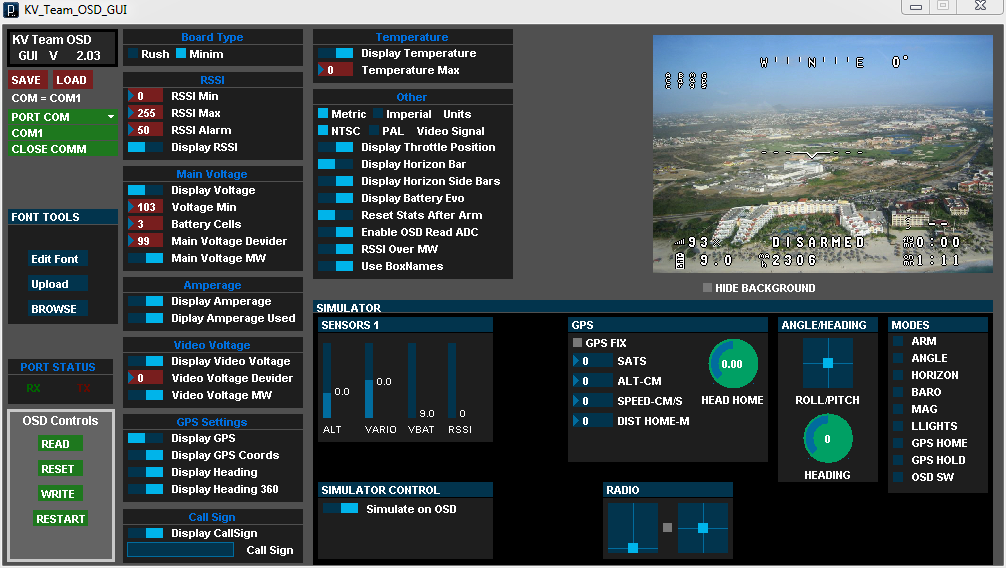
Результат таков. Видно, что данные идут, но во первых какая-то дикая проблема с выводом(кодировкой), во вторых не все данные отображаются. В общем картина вот такая.
во первых какая-то дикая проблема с выводом(кодировкой)
шрифт залейте! там в гуи кнопка есть… 😉
слевa Font Tools -> Upload
оффтоп… почитайте про принципы инерциальных систем навигации… если коротко, то на мемс сенсорах без корректора аля гпс это невозможно…
Почему невозможно? Направление по компасу, а смещение - двойной интеграл по составляющей акселя.
Почему невозможно? Направление по компасу, а смещение - двойной интеграл по составляющей акселя.
В идеальных условиях да.
Но вот вы не учли вибрацию, наводки на компас, ветер. Для корректировки этих ошибок и нужен GPS
Почему невозможно? Направление по компасу, а смещение - двойной интеграл по составляющей акселя.
на столе в тетрадке в формулах будет работать… у акселя есть нелинейность шкал, шум, вибрации и т.д… один интеграл не удержать без корректора (баро/гпс), а про 2 даже говорить не о чем… я дин. коэф. в компл. фильтр вводил для удержания 2-го интеграла в расчете высоты…
В идеальных условиях да.
Но вот вы не учли вибрацию, наводки на компас, ветер. Для корректировки этих ошибок и нужен GPS
Можно в реальных, но точность будет низкая поскольку ошибка накапливается. Год тому с акселерометром возились много при попытке сделать нормальное удержание по высоте на BMP 085. Реальная точность по компасу 5 град легко, а если повозится то и лучше будет.
Можно в реальных, но точность будет низкая поскольку ошибка накапливается.
если и можно, то только на секунды, а то и доли секунд…
по сути потому и называют сейчас prediction/предсказание по акселю, т.к. акслель дает быструю сост-ю практически без задержки фазы, НО на те сотни миллисекунд, которые так необходимы конечным пид регуляторам для устойчивой работы…
мой опыт такой: просто по акселю в перспективе от нескольких секунд и выше такая каша выходит, что данными это уже не назвать… вердикт- нельзя!
Результат таков. Видно, что данные идут, но во первых какая-то дикая проблема с выводом(кодировкой), во вторых не все данные отображаются.
Во-первых, спасибо Александру Маховику за помощь - все заработало. После перепрошивки MavLink-OSD/minim OSD начал корректно выдавать данные, полученные от AIOP. Во-вторых, если вдруг у кого-то возникнет такая же проблема, то сначала качаем здесь KV_Team_OSD_dev_r345.zip, потом по инструкции перепрошиваем свой MavLink-OSD/minim OSD. После в KV Team OSD GUI делаем upload шрифтов и настраиваем всё под себя. Далее необходимо подсоединить плату OSD к Serial 0 (TX->RX и RX->TX). После этого по-идее должно всё заработать.
все заработало
так а данные все идут с 2.1 прошивкой? переключение всех режимов отображается?
После в GUI делаем upload шрифтов.
может пропустили… я сверху писал об этом…
upd: аа понял, это вы подытожили… 😃
если и можно, то только на секунды
Можно и без акселя - только по компасу. Но ошибка будет еще больше. И естественно ветром сносить будет. Давным давно я еще с флайментором летал. И коптер на точке очень хорошо висел, куда там дешевым ЖПС. А знакомый в Москве на АРМ2 поставил ЖПС с коррекцией и 10 см получил. (Точность такого ЖПС порядка 1 см)
давно я еще с флайментором летал. И коптер на точке очень хорошо висел, куда там дешевым ЖПС
флайментор - это opt flow по сути? тогда да, но зависимость от освещения и поверхности…
А знакомый в Москве на АРМ2 поставил ЖПС с коррекцией и 10 см получил. (Точность такого ЖПС порядка 1 см)
если не секрет, то в чем секрет?! 😃
коррекция по чем? и по какому принципу?
так а данные все идут с 2.1 прошивкой? переключение всех режимов отображается?
Не знаю все ли, но вот что я вижу. Те режимы, которыми я пользуюсь, отображаются. Единственный минус - какой-то глюк, при котором в WinGui не читаются данные при подключенном Serial0/FTDI порте.
P.S. Сенсора батареи пока нет.
P.S.S. На значения прошу внимания не обращать - коптер кверхногами стоит на балконе с перекошеным сонаром. В остальном всё показывает корректно.
RC2 на базе 2.1… кореш пробовал и вроде как статусы не всех элементов отображается на экране… попробуйте…
опробовано сразу с выходом прошивки - результат положительный )
только 1 косяк нашел - показывает акро моде, даже если постоянно включен аксель
флайментор - это opt flow по сути? тогда да, но зависимость от освещения и поверхности…
если не секрет, то в чем секрет?! 😃
коррекция по чем? и по какому принципу?
Секретов по ЖПС нет. ЖПС имеет погрешности, которые можно измерить имея стационарный приемник. И результаты передать на подвижный. Ссылку в понедельник скину.
В остальном кроме систем с обратной связью можно рассчитывать и воздействие (коптер на N секунд наклоняется в заданном направлении на заданный угол , через N1 секунд воздействие снимается , через N2 секунд останавливается обратным наклоном на N0 секунд). В зависимости от воздействия и знания параметров точность получится.
Принимайте в ряды!
С RCTimer-а приехало:
- AIOP-UAV 433Mhz Autopilot GPS Flight Control System
- SK30A & SM450 V2 Black/Red Quadrotor
- RCTimer Voltage & Current Sensor 90A (suit MultiWii, APM, etc)
- Ну и куча мелочевки с запасным движком, регулем, пропами…
Внимательно изучил всю доступную инфу и собрал коптер, залил мультивий MultiWii_2_2, перенастроил на 115200 и подключил GPS, откалибровал регули и аппу (Futaba T7C + R617FS).
Все работает.
Подключил на S3 3DR модем и проверил его настройки, на А0/А1 подключил датчик тока и напряжения и залил MegaPirateNG_2.8_R3
Столкнулся с проблемой, которую пока решить не смог - MP не коннектится через модем! Перелопатил кучу инфы… Проверил модемы через терминал - работают! Переключил его на SO с изменением скорости на 115200 - тоже самое. Вернул назад на S3.
Совершенно случайно наткнулся на такой эффект - если AIOP подцепить к компу по USB, то на модеме начинает мигать красный диод. Отключаешь USB - диод продолжает мигать! Т.е. на S3 идут какие-то данные. Попробовал подцепиться через модем к MP - все работает! Но ровно до того момента, как передернешь питание AIOP. Для того чтобы все снова заработало нужно опять подцепить/отцепить USB и тогда опять до отключения питания Mavlink-данные начинают непрерывно валится на S3.
Как сделать так, чтобы все начинало работать без этого шаманства?
PS: В скетче прописано так:
#define SERIAL0_BAUD 115200 // Console port
#define SERIAL2_BAUD 115200 // GPS port
#define SERIAL3_BAUD 57200 // Telemetry (MAVLINK) port
Скажите, а megapirateng еще не способен адекватно с uBlox Cn-06(тот, что настройки свои забывает) работать?
Почитал про апгрейд этого модуля, не сложно в принципе, но где-то микросхемку найти не придумал пока где
pial.net/…/Crius-CN-06-GPS-v10-module-EEPROM-mod.a…
#define SERIAL0_BAUD 115200 // Console port
#define SERIAL2_BAUD 115200 // GPS port
#define SERIAL3_BAUD 57200 // Telemetry (MAVLINK) port
я так понимаю у вас просто не раскомментирована нужная строка. - serial 3 судя по всему, на плате нужно смотреть где он выведен и туда подключать
я так понимаю у вас просто не раскомментирована нужная строка. - serial 3 судя по всему, на плате нужно смотреть где он выведен и туда подключать
Вы о чем? Я же написал, что он у меня подключен уже к S3 и к S0 подключать пробовал.
Возможно непонятно написал, но я выложил кусок своего скетча и, как можно видеть - все раскомментировано.
Сконструировал я двух осевой подвес для камерки типа ГоПРО на цифровых сервах. И вот, когда подключаешь одну серву, то наклон коптера отрабатывается безупречно. А если подключить две сервы сразу, (то есть две оси) то никакой логики в поведении подвеса не прослеживается. Коптер наклоняешь в разные стороны, а подвес при этом поворачивается совершенно как попало.
Питание подается на плату через регуляторы, пробовал подавать питание на сервы отдельно, от отдельного источника, результат тот же.
(Прошивка RC2)
Может кто сталкивался с таким?
посмотрите мою проблему здесь
решение этой проблемы здесь
возможно решение вашей проблемы заключено в этом же
Вы о чем? Я же написал, что он у меня подключен уже к S3 и к S0 подключать пробовал.
Возможно непонятно написал, но я выложил кусок своего скетча и, как можно видеть - все раскомментировано.
прошу прощения, все время забываю, что тут знак # не означает комментарии
Скажите, а megapirateng еще не способен адекватно с uBlox Cn-06(тот, что настройки свои забывает) работать?
Почему “еще”, если не ошибаюсь, инициализация gps была добавлена еще с версии 2.8.
Тестировали еще тем летом когда не было версии-2, работает.