Autoquad от Билла Несбита, топовый контроллер по доступной цене

А где этот гуглокод??
code.google.com/p/autoquad/ - надеюсь это и код там актуальный
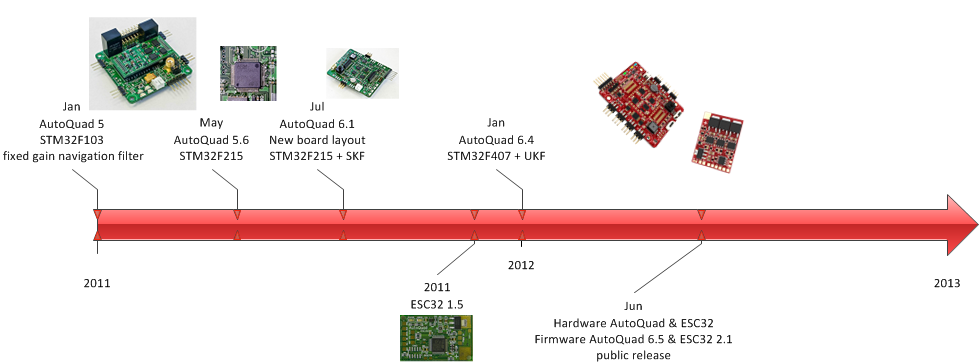
В таймлайне на сайте Автоквада есть интересная зарубка:
Jan 2012: v6.4
New MCU : STM32F215 -> STM32F407 cortex M4 Filter: SKF -> UKF and the elimination of the dynamic flight calibration due to the use of unscented Kalman filter (UKF)
о чем здесь?
кстатии о датчиках, походу они все аналоговые
ну если вычисляки основного проца хватает на кучу фильтров, так даже лучше. Можно поточнее считать. Выкидывается дачиковый АЦП, который вещ в себе.
Ну если у проца хороший АЦП и нет помех, то конечно хорошо и теперь понятно почему не используются новые датчики =) Всё на АЦП завязано, а новые датчики на i2c все перешли - много гемороя может быть с переписыванием, а если и на этих датчиках отлично летает, то нет смысла чего то переделывать и экспериментить.
а новые датчики на i2c все перешли - много гемороя может быть с переписыванием
плюс к тому если делать в петле, с аналогово дачега мы гарантированно берем самые свежие значения.
А в цифре дискретно, и значение без 1 микросекунды может быть уже протухшим а может и без 200 микросекунд и т.д., а подразумеваем то как свежее, что не хорошо. Будет фазовый сдвиг в виде синусоиды, что на мой взгяд в вие и дает периодические(гармонические) вздрагивания.
Можно писать с чтением на прерываниях, но ног не напасешься да и адов параллелизм 😃
Удержание позиции в ветер:
пишут что drift 50cm
Осталось дождаться отзывов от реальных владельцев 😃
Удивило наличие 2х компасов - один 2х осевой, другой 1-осевой, судя по описаниям.
аналоговые, трёхосевого нет, по крайней мере я ненашел…
ещё год назад, подбирал датчики rcopen.com/forum/f134/topic224458/170
так вот магнитометр - платка с двумя микросхемами…
пишут что drift 50cm
Осталось дождаться отзывов от реальных владельцев
Ох бы сейчас Наза мотыляла на ветру, но правда тож точку держала. Вот как он (автоквад) это делает, стабильно висит в ветер?
Получается что управление с пульта не нужно? Залил с компа маршрут, по ВТ каналу залил в коптер, нажал кнопку старт и пошло выполнение программы- взлет, облет точек, возврат и посадка. Главное, что бы время полета по программе не превышало возможности коптера. Я видел подобную систему в каком то ролике, там буржуйские МЧСники запускали квадрик для “прочесывания” квадрата. Очень красиво было - на ноуте по сенсорному экрану прочертил маршрут, пара кликов и коптер ушел на задание.
Именно так, например Вуконг с такими возможностями стоит 41 000 руб. WKM + 18 700 руб. модем + 38 500 руб. ПО = 98 200 рублей 😉
А к автокваду нужно докупить Xbee, хотя бы блютуз за $10.
нажал кнопку старт и пошло выполнение программы
хорошо если так из коробки, в реальности наверняка неделю мучить настройки, чтобы получить нечто похожее как на видео… а так есть вполне дешевый ардукоптер (полный фарш с гексорамой вроде бы около 1000$), автоматически летал еще в 2010 (вроде бы) на Sparkfun AVC
А к автокваду нужно докупить Xbee
сейчас какой то 3DR Radio kit 433MHz хвалял (Sir Alex летает с ним)… хотя до этого apc220 хвалили, а в итоге пришлось продать за ненадобностью
хорошо если так из коробки, в реальности наверняка неделю мучить настройки, чтобы получить нечто похожее как на видео…
я ж задавал вопрос тут, что такое dynamic flight calibration due to the use of unscented Kalman filter, уж не автоподстройка ПИДов?
уж не автоподстройка ПИДов?
Похоже, но опять же - написать много всего можно, как и видео красивых понаснимать. Надо подождать реальных владельцев с этого форума, отзывов, косяков и если летать как на видео у все будет, то низкий поклон разработчикам, а если снова куча гемороя с настройкой и какие нибудь нюансы, то будет просто очередной контроллер от очередного умельца, который в очередной раз отлично летает только у терпеливых и избранных =)
Надо подождать реальных владельцев с этого форума, отзывов, косяков и если летать как на видео у все будет
Глеб, ну ты то должен понимать, что такое отзыв реальных владельцев. Почитай тему Назы, там такой треш написан про контроллер, который вообще не надо настраивать… Меня от покупки останавливает только то, что я купил скайволкер и пока он у меня не полетит на ардупилоте мега, я больше вкладываться в электронику не буду пока 😃
который отлично летает только у терпеливых и избранных =)
так и должно быть, опыт того же Виктора Висасты этому прямое подтверждение.
что такое отзыв реальных владельцев
почитай тему криуса - жесть та еще местами… но я к тому что есть ли реальные преимущества у этого контроллера перед, например, ардукоптером, если не принимать во внимание рекламные видео ролики?
зы: режим orbit понравился, думаю для ардукоптера/мегапирата такое можноприкрутить (circle уже есть, надо только корректировку yaw добавить)
опыт того же Виктора Висасты этому прямое подтверждение
ну у него супер мега шикарно летает, но опять же сферический контроллер в вакууме пока что, а жаль
сейчас какой то 3DR Radio kit 433MHz хвалял (Sir Alex летает с ним)…
Ага сейчас это тренд, дешевле чем хэбэ про, но эквивалентный по характеристикам даже скорость выше по воздуху дает.
По поводу автоподстройки пидов ничего удивительного когда на борту есть запас по вычислительной мощности, еще в 1940 году появился математический метода
Зейглера-Николоса для вычисления ПИД характеристик ПИД контроллера, рано или поздно этот метод должны реализовать.
Сам контроллер, думаю надо брать, давно в воздухе витает, да уже шманит во всю, что надо переходить на современные процессоры, конечно за всеми не угонишся они будут появтся как грибы но сидеть ждать более нового и лучшего так ничего и не купишь в итоге да и цены на них как заметил не особо снижаються, единственное что меня смущает в нем на первый взгляд это то, что все в одном не модульная схема.
а что там за хитрый второй бародатчик с носиком?
Получается, в планах прошивка под самолет. На носик силиконовая трубочка одевается, второй конец которой заканчивается трубкой, направленной навстречу потоку. Получается дифманометр для измерения воздушной скорости.
какие то не топовые датчики в 6.1
Может, у программиста готовые библиотеки под них. А для новых датчиков нужно искать\писать библиотеки для ARM и отлаживать.
Раньше всех начал продавать - больше заработал. А потом уже можно и совершенствовать, продавать улучшенные V2.
На фото платы, которая в магазинах, один бародатчик…
Раньше всех начал продавать - больше заработал. А потом уже можно и совершенствовать, продавать улучшенные V2.
Раньше всех начали openpilot, хз можно назвать успешным CC проект или нет. Про революшен вообще молчу.
А автоквад давно собирался
еще в 1940 году появился математический метод
А споры до сих пор идут. Тем более, железно может быть реализован какой-нибудь ПИИ или многокаскадная схема регулятора с кучей нелинейностей ( if(x>500){x=500;} ). И фиг подберешь к нему коэффициенты. Еще и динамические характеристики ВМГ меняются с разрядкой аккумулятора.
Получается, в планах прошивка под самолет.
не факт, может быть они как то узнают скорость дрейфа или например меняют вектор на какое то время для компенсации инерции после отпускания стиков =) ну т.е. чтобы опустил стики и коптер застыл, а не продолжил плыть по инерции некоторое время
С моей точки зрения, аналоговые датчики всё же лучше, в том плане, что чем меньше в микросхеме прибамбасов - тем меньше глюков, а потом уже либо АЦП родное проца испрользовать либо через стороннее откатанное через SPI это уж как кому.
P.S. боюсь i2c…