PIXHAWK PX4 Autopilot еще одна летающая железка

Про двойное питание на Пиксе - питание идет одновременно с power modul и внешнего BEC который втыкается в любой канал где моторы?
Я правильно понял про двойное питание ? или тут есть какая хитрость?
Я правильно понял про двойное питание ?
В целом да
тут все подробно объяснено - ardupilot.org/…/common-powering-the-pixhawk.html
двойное питание
Можно и тройное питание сделать через диодную развязку. Power Module и два бека
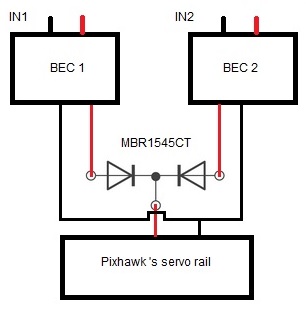
[QUOTE=alex_nikiforov;6550460]Можно и тройное питание сделать через диодную развязку. Power Module и два бека
Тройное перебор, двойного заглаза, зачем лишние шумы
В отличии от сотки, с которой были частые потери связи уже на 400 метрах
Ого, 400 метров, у меня 455 телеметрия на полной мощности (20) работает метров на 50-100. Когда у меня пришёл шлем Eachine EV-800, я заметил, что у него и у телеметрии антенны 1-в-1. Может в этом дело?
Спасает только телеметрия Frsky на экране тараниса с помощью Teensy 3.2. Удобно и ловит так же далеко, как управление, километра на два с обычной антенной, вверх до 900 метров приём точно был, дальше ещё не пробовал. Но показываются не все данные, хотя, я думаю, это можно решить поковырявшись в настройках программы.
работает метров на 50-100
Некоторые комплекты телеметрии комплектуются стандартными вайфайными антеннами, поэтому ничего удивительного. Разберите и посмотрите. Для телеметрии подойдут антенны от радиостанций.
А что такого страшного произойдёт, если потеряется связь с телеметрией? Но связь с управлением будет… Продолжит ли коптер полёт в режиме Авто?
В авто полет будет продолжен, а подать команду с наземной станции уже не получится, телеметрии не будет.
Решил настроить аппарат в режиме autotune и понял что он совсем не адекватно ведет, вместо того чтобы крениться влево и вправо, вперед и назад он крен дает в сторону луча и в итоге через некоторое время раскачивается в разные стороны и падает как брошенная монета на пол, в чем может быть проблема? Двигатели у меня конечно старенькие, один горячее другого, может уже в них проблема, или частоту обновления ESC может еще проверить? Какие мысли
Вчера мне показалось, что байка про то, что дроны иногда хотят рвпнуть обратно в поднебесную, имеет место на жизнь 😉
Мой квад без объявления войны начал набор высоты, потом пиликнул бузером музыки тирлим тирлим и начал саой полёт… На апу не реагировал, попытка фэйлсейва так же не удалась. Он поднялся с креном вправо, потом выровнялся и начал улетать… Если бы не высокая береза на его пути, не понять чем бы все кончилось. Вот.
Вспомним детские навыки лазания я его снял. Но как-то не понятно, что это было?
В пиксе есть флешка, на ней есть логи с “что это было”.
Все. Не могу понять в чем дело. Схема Y6B, все настроено, ни каких ошибок, подключение моторов и установка пропеллеров как на схеме. Вместо нормального взлета в Stabilise - оверкиль назад.
Полетал на Назе, на Таррот, скучные они, не с чем заморочиться 😃 и по точкам хочется полетать. Посмотрел данный контроллер - подходит. Вопрос в том, что у него много клонов разных, отличающихся в т.ч. и конструкционно (не только корпусом и расположением разъемов - пиксхак, пиксраптор и т.п.), плюс заявлено, что есть доп процессор с питанием отдельным, который, как я понял, тоже где есть, а где нет. Подскажите, какой клон и где можно купить, проверенный, свежий (2.4.8, как я понял, не зря же их обновляют, хотя не нашел чем отличаются)? Хочу заказать, а потом уже тему рыть по настройке. Помогите советом.
Хорошо когда кому то везёт в китайской лотерее.)
везёт в китайской лотерее.)
Понимаю, Рома, хотел бы более конкретные советы. Лотерея при этом останется, естественно.
хотел бы более конкретные советы
Я брал здесь. Выбирайте сами, что Вам по нраву…
А F4BY не рассматриваете? Соседняя ветка с обсуждением rcopen.com/forum/f123/topic456525 . Там подделок не будет, только оригинал.
Выбирайте сами, что Вам по нраву…
Это понятно. Если будут еще советы, не откажусь.
Берите F4.
Где можно посмотреть инфу по различиям у пиксы и ее клонах на разных версиях??? Основные в продаже 2.4.6, 2.4.7, 2.4.8, но описанных различий не вижу. По F4 читаю, думаю…
База же у всех одна, но цена в два раза скачет
Processor
- 32bit STM32F427 Cortex M4 core with FPU
- 168 MHz
- 256 KB RAM
- 2 MB Flash
- 32 bit STM32F103 failsafe co-processor
Sensors
- ST Micro L3GD20 gyroscope
- ST Micro LSM303D 14 bit accelerometer / magnetometer
- MEAS MS5611 barometer
-InvenSence MPU6000 accelerometer/ gyroscope
ST Micro LSM303D 14 bit accelerometer / magnetometer
берите вариант у которого нет такого датчика. глючный до жути.
и если он есть в конфиге то не отключить