PIXHAWK PX4 Autopilot еще одна летающая железка

По крайней мере больше видимых повреждений нет.
По крайней мере
Сам ПК при подаче 5В. работает?
Не пробовал, боюсь подключать.
Так USB воткните в голый контроллер и все, че бояться то?
Да работает. К мишке коннектится.
Да работает. К мишке коннектится.
Так меняйте кондер и все.
Друзья, хочу немножечко расширить функционал своего старенького пиксхавка, в связи с этим есть несколько вопросов.
- кто какую OSD нынче использует? (помню, что раньше они очень любили гореть) Можно ли ссылочку на качественный продукт?
- что необходимо для вывода телеметрии на дисплей тараниса 9+? видел в сети несколько фото с неизвестными мне двумя приблудами, но как называются, где купить и как настроить что то не нашел.
- как подключить датчик тока ALLEGRO на плате от Алексея Козина к PIXHAWKу (сейчас питается от отдельного DC-DC и во всей колодке для POWER MODUL используется только два провода)
- При подключении дисплея SSD1306 необходимо произвести какие либо его настройки или достаточно воткнуть в i2c и включить необходимый пункт в FULL PARAMETR LIST.
Заранее благодарен.
47мкФх6,3(10)В
Нужен точно такой же по параметрах или можно что то увеличить, вольты, фарады.
Здравствуйте подскажите новичку. Собрал коптер на вот таком раме. Были Осциляции уменьшил пиды по питчу и ролу почти до минимума вроде все в норме летает хорошо. Но по логам есть вибрации по оси Z . Как настроить? При удержании коптера снизу и включении двигателей на 50 % вибрации вообще не чувствуются.
вибрации от пидов не зависят. потоки с лопастей лупят по раме, вибрация идет по раме, если виброразаязанная часть легкая а провода дубеют на морозе - вибрации могут проходить, кроме того завихрения от пропеллеров могут попадать на контроллер.
поэтому смотреть проводки - если дубовые менять на силикон и укладывать так чтобы не проходили вибрации, закрывать от воздушных возмущений, немного утяжелить ту часть виброразвязки где контроллер
Друзья, хочу немножечко расширить функционал своего старенького пиксхавка, в связи с этим есть несколько вопросов. 1) кто какую OSD нынче использует? (помню, что раньше они очень любили гореть) Можно ли ссылочку на качественный продукт?
в принципе сейчас появились графические мавлинк - осд, но я сам пользуюсь классическими поэтому посоветовать с выбором не могу.
у myairbot.com есть микро миним осд с малопотребляющим видеопроцессором AB7456 его часто используют на микро моделях
- как подключить датчик тока ALLEGRO на плате от Алексея Козина к PIXHAWKу (сейчас питается от отдельного DC-DC и во всей колодке для POWER MODUL используется только два провода)
питать 756 сенсор нужно от 5 вольт, сейчас есть модели на 3.3 вольта но они дорогие.
при этом у 756 и выход тоже 0 … 5.0 вольт а аналоговый вход у пикса 0 … 3.3 поэтому желательно адаптировать, т.е. в самом сенсоре сделать резисторный делитель, а пиксу подобрать коэффициент таким образом чтобы при пропускании определенного тока через датчик показания тестера- амперметра совпадали с показаниями в мишен планере
- При подключении дисплея SSD1306 необходимо произвести какие либо его настройки или достаточно воткнуть в i2c и включить необходимый пункт в FULL PARAMETR LIST. Заранее благодарен.
задать тип экрана в параметрах и подключить к шине i2c
Попробую сделать крышку на контролер посмотрю что изменится. И подскажите при зависании коптера по gps немного плавает в пределах 20-40 см также чуть колеблется вверх вниз. При удержании высоты по барометру все чётко только чуть ветерок сдувает. Вроде компас калабровал на лужайке. Подскажите как правильно произвести калибровку компаса.
Датчик тока виноват, обычный китайский, микросхема на нем сгоревшая. Ну их в пень эти датчики, запитаю от бека на 5 вольт. Скажите, в разъеме power по две ноги плюса и минуса, питань нужно по обеим парам или по одной?
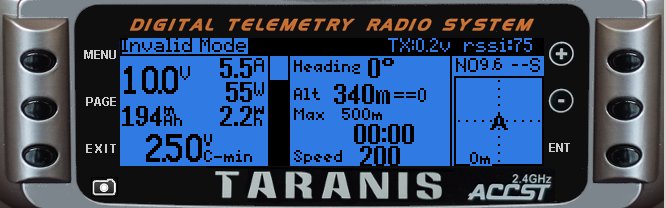
- что необходимо для вывода телеметрии на дисплей тараниса 9+? видел в сети несколько фото с неизвестными мне двумя приблудами, но как называются, где купить и как настроить что то не нашел.
Если Вы хотите простую телеметрию то приблизительно так -
Если ну оочень красивую, типа такой -
Попробую сделать крышку на контролер посмотрю что изменится. И подскажите при зависании коптера по gps немного плавает в пределах 20-40 см также чуть колеблется вверх вниз. При удержании высоты по барометру все чётко только чуть ветерок сдувает. Вроде компас калабровал на лужайке. Подскажите как правильно произвести калибровку компаса.
если вибрации великоваты то небольшой дрифт по высоте и позиции может быть обусловлен ими, кроме того ухудшать удержание позиции может различная излучающая бортовая и наземная аппаратура
удержание позиции с точностью 20см это очень неплохо, если конечно этот процесс не резкий
А какой допустим максимальный ток при подключении серв?
pixhawk не выдает питание серв а только распределяет питание от внешнего бп, для серв должен использоваться внешний источник
поэтому ток ограничен только возможностями бп и спецификацией штыревых разъемов и вилок подключения серв
pixhawk не выдает питание серв а только распределяет питание от внешнего бп, для серв должен использоваться внешний источник
поэтому ток ограничен только возможностями бп и спецификацией штыревых разъемов и вилок подключения серв
Да, я это и спрашиваю - какие там внутри дорожки? Или лучше на всякий случай отдельную шину питания провести.
И какой UBEC ампер на 8-10 лучше взять?
И какой UBEC ампер на 8-10 лучше взять?
Серьезный аппарат, куда такой?
Или лучше на всякий случай отдельную шину питания провести… ампер на 8-10
Под такой ток уж лучше отдельно.
Серьезный аппарат, куда такой?
Да там у меня 3 сервы 15 кг. ну и плюс ещё 4 сервы поменьше.
Да там у меня 3 сервы 15 кг. ну и плюс ещё 4 сервы поменьше.
Нехило, тогда уж точно отдельно.
На такой ток не встречал. Проще разделить ампер по 5 хотя бы.
Нехило, тогда уж точно отдельно.
На такой ток не встречал. Проще разделить ампер по 5 хотя бы.
Да не, у китайцев полно разной мощности и 15 и 20 А есть, просто как с надёжностью. Подороже взять или подешевле?