PIXHAWK PX4 Autopilot еще одна летающая железка

Арм тумблером на 8 канале - случайно задеть не мог, как и специально.
Стиками безопаснее как мне кажется. Если приёмник словит глюк и выставит в том канале, где у Вас тумблер, значение дизарма - можно получить дрова.

значение дизарма - можно получить дрова.
Согласен, но проверил в МП, что значения замирают при выключении аппы. Другой вопрос - когда выключаешь аппу чтоб проверить ртл, а таранис потом не включается, ругаясь на этот тумблер)))

По логу скачок вибраций.
Очень странно, крепил на штатный паралон в комплекте, поверить не могу что вибрация могла вызвать такое. Раньше же летал в такой же конфигурации и норм всё было

Подскажите по режиму Loiter… Слишком плавно тормозит. Т.е., если отпустить стик, притормаживает, потом еще метра 2-3 “проплывает”. Полез в настройку PID в MP, но там, для этого ничего не поменять практически… Position XY максимум дает сделать 0,2 (хотя, это вроде как и рекомендовано с версии 3), Velocity XY - P, то же максимум 1.000 (значение по умолчанию). Всё что, из мне понятного, позволяет изменять Velocity XY - I (попробовал уменьшить - “тормоза” срабатывают чуть резче, но потом, всё равно, пролетев 2-3 метра. При чем, не важно, на какой скорости его останавливать - один фиг, проплывает какое-то расстояние, потом останавливается. При этом позицию держит отлично, ветром не сдувает.
так же не смог победить на релизе и 450-й раме. А вот на тестовой прошивке на 300-й раме получается четко и предсказуемо останавливаться. Не исключаю, что зависит от конфигурации коптера - они у меня совершенно разные
На этом же сетапе, на прошивке PX4 встаёт колом (но там свои непонятки для меня есть).

из полного списка параметров зачастую можно менять гораздо сильнее чем из основного экрана пидов.
ardupilot.org/copter/docs/loiter-mode.html
за разгони торможение отвечают
WPNAV_LOIT_MAXA : max acceleration in cm/s/s. Higher values cause the copter to accelerate and stop more quickly.
за толчок / взбрыкивание для получения ускорения WPNAV_LOIT_JERK: max change in acceleration in cm/s/s/s. Higher numbers will make the vehicle more responsive, lower numbers will make it smoother.
НО! прежде чем трогать пиды лоитера убедитесь что рэйт пиды по ролу и питчу четко работают.
для этого посмотрите в логах диаграмму требуемого системой навигации рола и питча и сравните их с фактическими, если они расходятся на 5 градусов и более - значит пиды стабилизации настроены слишком вяло, это может приводить к описанным вами ошибкам в навигации

Очень странно, крепил на штатный паралон в комплекте, поверить не могу что вибрация могла вызвать такое. Раньше же летал в такой же конфигурации и норм всё было
В принципе лог вибраций мог показать сам завал.
Тогда могу предположить , что был порыв ветра, а коптер не смог его парировать.
Может слабое вмг для такого ветра, а может слабые пиды. По сообщению они вроде как раз настраивались.
Стиками безопаснее как мне кажется. Если приёмник словит глюк и выставит в том канале, где у Вас тумблер, значение дизарма - можно получить дрова.
Согласен.
Если последнее сообщение в логе дизарм, то это как раз и произошло. А если произошло 1 раз, то может и повториться. К чему такой риск?
Если последнее сообщение в логе дизарм, то это как раз и произошло.
А за мгновение до дизарма сообщение
Land complete, Land complete maybe
на высоте 102 метра. Сегодня погоняю ртл на более безопасной высоте и ближе к дому))
по логу что настораживает
- матек 405 чибиос, в недавних прошивах народ наблюдал глюк у кого высота прыгала у кого зависон.
- калибровка радио каналы 1-4 имеют рцмин рцмакс четко 1100 - 1900 похоже вы забыли откалибровать радио
- к примеру строка 125045 смотрим состояние входов с радио, канал 3= 982 а в калибровке у канала минимум 1100
- 125060,2018-08-03 18:37:25.684 обновляется параметр PARM MOT_THST_HOVER = 0.125 т.е. полетник вычисляет что средний газ висения 12,5% ??? это коптер а на дирижабль обычно газ висения 30-60%
- сильные вибрации в конце лога. что то сломалось или отвинтилось.
вниз полетел уже дизармленым, без записи лога, т.е. вибрации в конце не удар об землю. - сильные броски тока в период этих вибраций 0-30а в короткий промежуток.
вобщем оно не должно летать вообще, судя по выходам на моторы пвм висения 1250мс, при этом радио откалибровано так что пвм на движки не может быть меньше 1100
это значит что у него очень дискретное управление, чуть дал газу и он рвется в космос.
возможно сильный восходняк его потянул вверх и он решил что совершил посадку и дизармился.
возможно первопричина в том что коптер летал ненастроенным в частности неоткалибровано радио и скорее всего регули тоже
1100 - 1900 похоже вы забыли откалибровать радио
да, это верно подмечено. Заливал с нуля прошивку в пятницу, восстановил бэкап настроек, а радио не откалибровал. И за 4-5 акков с момента прошивки не было ртл, только летал вокруг себя.
чуть дал газу и он рвется в космос.
Видимо, потому он подрывался при отрыве от земли в альтхолде, не сильно 30-40см. В полете в стабе и других режимах не было желания удрать
сильные броски тока в период этих вибраций 0-30а в короткий промежуток.
Это могу объяснить моими попытками перехода в альтхолд из ртл и через секунду срывы обратно в ртл с торможением 65км/ч до 0км/ч При этом переходы сопровождались наборами скорости(6-13А) и резкими торможениями(по осд плохо видно из-за экранирования антенны аккумулятором, но больше 17.2А). Как раз эти дикие торможения могли вызывать осцилляции и характерные всплески вибрации в конце лога
Спасибо, сегодня отлетаю еще пару аккумуляторов
upd кстати, попробовал сегодня прошить latest - те же проблемы, что начались с 7 августа, крутит компас, bad ahrs, уплывает горизонт. Если перезагрузить и не трогать, то стоит ровно и никуда не тянет, но при этом за армом сразу дизарм, в messages пусто. Только тронешь коптер и начинаются вертолеты
настройте ваш передатчик так чтоб все каналы были порядка скажем чуть больше на несколько единиц чем 1000 (1000-1005) и чуть меньше 2000 в максимуме (1998-2000),
затем откалибруйте и сохраните радио калибрешен в мишен планере
затем значения из фактической калибровки по каналу газа rc3 перенесите в калибровку регулей, в утилите блхели можно вручную прописать ендпоинты
при этом нижний ендпоинт у регулей можно чуть поднять, например если у радио 1000 минимум то поставить 1005 с тем чтобы мотор гарантированно выключался.
обязательно проверьте значение газа при выключении передатчика если у приемника с выключенным передатчиком на выходе 950 то поставьте тротл фаилсэйф чуть больше например 960, но он должен быть существенно меньше минимального в калибровке.
небольшие запасы позволяют избежать глюков связанных с температурными дрифтами у приемников с плохими резонаторами итд
Сегодня приехал Pixahack v3 и… что-то нигде не нашел на него документацию (распиновки и т.д.), сайт CUAV только на китайском, но даже и там, в разделах, где есть ссылка на документацию, получаем 404… Не подскажете, где глянуть ?
гуглится на раз
doc.cuav.net/flight-controller/…/pixhack-v3.html#接…
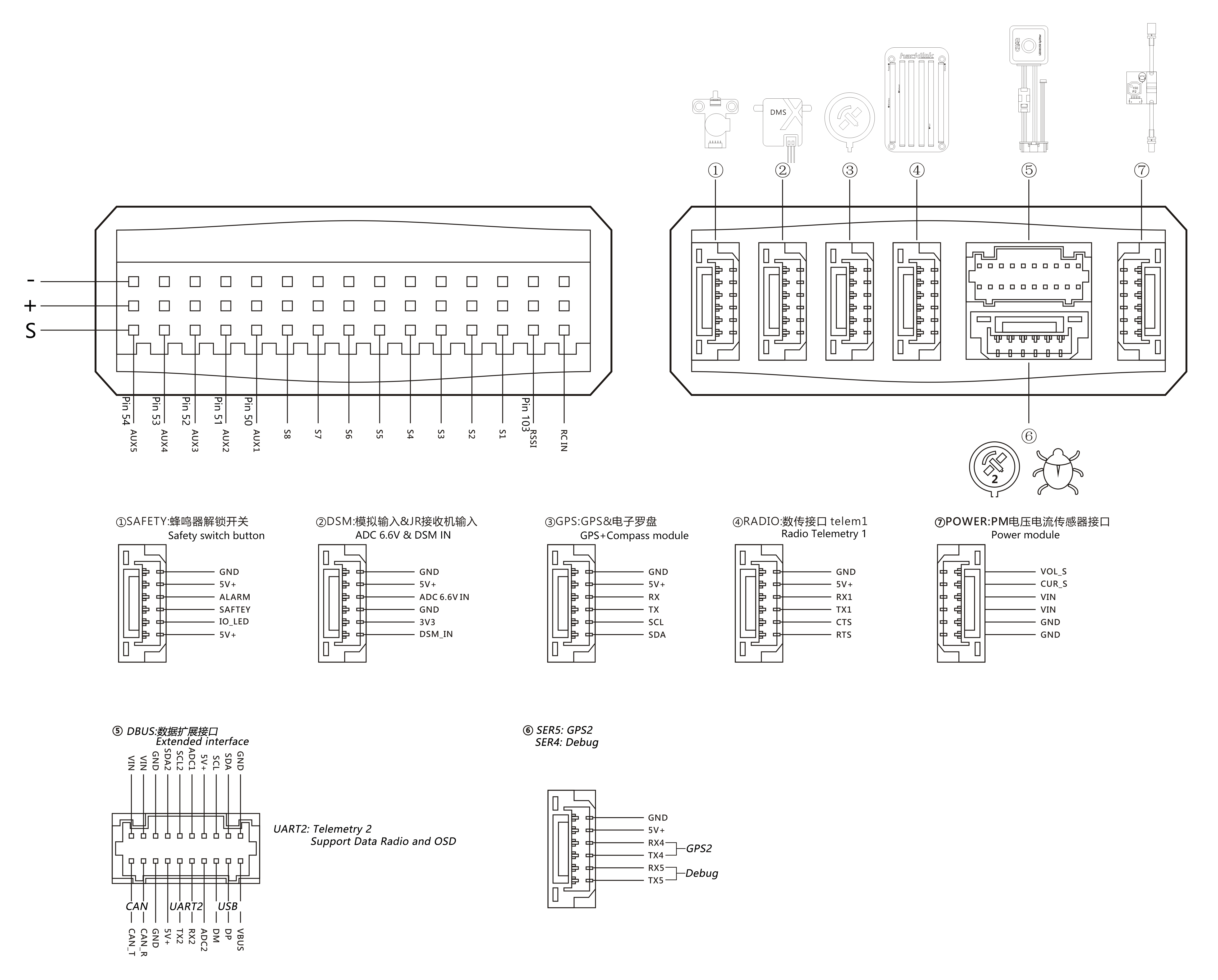
в Pixahack v3 есть аппаратный баг…
в пиксе пины 50-54 предназначены для различных функций, втч могут быть использованы как цифровые входы для считывания реального момента срабатывания затвора камеры или например сенсора оборотов, а аппаратно китайцы (куав) поставили туда однонаправленный буффер вместо двунаправленного
настройте ваш передатчик
настроил 1002-1995, в ESC calibration в MP указал 1005-1995 и откалибровал там же. А вот при выключении аппы канал газа не падает в минимум и остается на ~1500. В тараньке выбран no pulses, похоже что-то еще упустил
утилите блхели можно вручную прописать ендпоинты
Пробовал там, но на прошивке арду блхели сьют не подключается к регам, на айнаве подключался
Ну, как сказать “на раз”… Я тут полчаса вбивал в поисковик всевозможные комбинации с Pixhack v3 (manual, doc и т.д.) и, либо на неработающие ссылки cuav либо на краткую информацию на docs.px4.io, либо на картинки с Pixhack предыдущей версии 😃 Правда сейчас глянул, распиновки у предыдущего Pixhack такие же, как и у v3… В любом случае, спасибо !
По описанной Вами проблеме… Вряд ли я буду использовать этот функционал. Главное что бы еще какие баги не повылезли.
Пробовал там, но на прошивке арду блхели сьют не подключается к регам, на айнаве подключался
по этой инструкции делали? ardupilot.org/plane/docs/common-dshot.html#blheli-…
накрайняк можно и через юсб адаптер/модифиционовнный фтди регули настроить
по этой инструкции делали? ardupilot.org/plane/docs/comm...hrough-support
нет, завтра попробую. Для коптеров, где регуляторы на гребенке висят имею cc3d с клинфлаем)) на этом же коптере все запаяно в труднодоступных местах.
Сегодня на втором акке опять случился глюк баро. На третьей минуте ОСД показало 1500 метров и те же симптомы - отвал компаса, плавное снижение. Логи ТУТ. В общем, электролит не спас ситуацию. Видимо придется уходить айнав/бетафлай и учиться летать в акро))) Кстати, в общей сложности сегодня произвел более пяти возвратов домой, как по тумблеру, так и отключением аппы - все сработало четко, трижды сажал и дизармился, остальные разы подхватывал на подлете чтоб газон не косить.

Ребята. Кто летает на крыле или самолете? Ardupilot обязательно нужен компас? Крыло AR.Wing + Mini Pix от Radiolink с последней прошивкой (ChibiOS). Не хочется резать тушку и где-то на консолях размещать антенну. Так как внутри много места. Заранее спасибо за ответ!

Ardupilot обязательно нужен компас?
Нет. Успешно летают и без компаса.

Всем привет. Большая просьба посмотреть логи, квадрокоптер не переходил ни в один из автоматических режимов (не работал PosHold, loiter, RTL). Удалось вернуть вручную после перезагрузки пульта. Есть ошибки, но мне совсем не понятно откуда ноги растут. Заранее спасибо откликнувшимся.
cloud.mail.ru/public/2NYi/n9BahYxb2