PIXHAWK PX4 Autopilot еще одна летающая железка

настройте ваш передатчик так чтоб все каналы были порядка скажем чуть больше на несколько единиц чем 1000 (1000-1005) и чуть меньше 2000 в максимуме (1998-2000),
затем откалибруйте и сохраните радио калибрешен в мишен планере
затем значения из фактической калибровки по каналу газа rc3 перенесите в калибровку регулей, в утилите блхели можно вручную прописать ендпоинты
при этом нижний ендпоинт у регулей можно чуть поднять, например если у радио 1000 минимум то поставить 1005 с тем чтобы мотор гарантированно выключался.
обязательно проверьте значение газа при выключении передатчика если у приемника с выключенным передатчиком на выходе 950 то поставьте тротл фаилсэйф чуть больше например 960, но он должен быть существенно меньше минимального в калибровке.
небольшие запасы позволяют избежать глюков связанных с температурными дрифтами у приемников с плохими резонаторами итд

Сегодня приехал Pixahack v3 и… что-то нигде не нашел на него документацию (распиновки и т.д.), сайт CUAV только на китайском, но даже и там, в разделах, где есть ссылка на документацию, получаем 404… Не подскажете, где глянуть ?
гуглится на раз
doc.cuav.net/flight-controller/…/pixhack-v3.html#接…
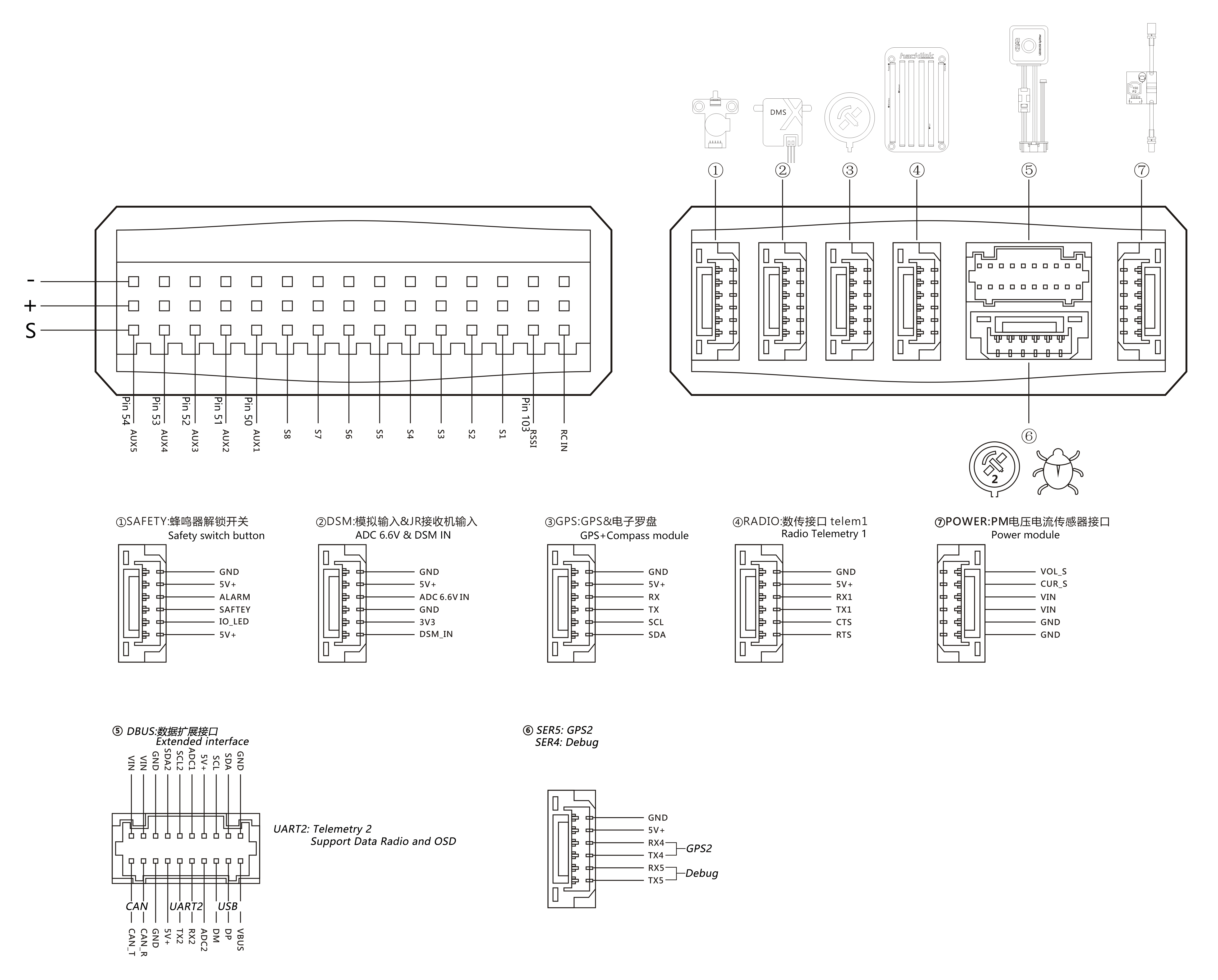
в Pixahack v3 есть аппаратный баг…
в пиксе пины 50-54 предназначены для различных функций, втч могут быть использованы как цифровые входы для считывания реального момента срабатывания затвора камеры или например сенсора оборотов, а аппаратно китайцы (куав) поставили туда однонаправленный буффер вместо двунаправленного

настройте ваш передатчик
настроил 1002-1995, в ESC calibration в MP указал 1005-1995 и откалибровал там же. А вот при выключении аппы канал газа не падает в минимум и остается на ~1500. В тараньке выбран no pulses, похоже что-то еще упустил
утилите блхели можно вручную прописать ендпоинты
Пробовал там, но на прошивке арду блхели сьют не подключается к регам, на айнаве подключался
Ну, как сказать “на раз”… Я тут полчаса вбивал в поисковик всевозможные комбинации с Pixhack v3 (manual, doc и т.д.) и, либо на неработающие ссылки cuav либо на краткую информацию на docs.px4.io, либо на картинки с Pixhack предыдущей версии 😃 Правда сейчас глянул, распиновки у предыдущего Pixhack такие же, как и у v3… В любом случае, спасибо !
По описанной Вами проблеме… Вряд ли я буду использовать этот функционал. Главное что бы еще какие баги не повылезли.
Пробовал там, но на прошивке арду блхели сьют не подключается к регам, на айнаве подключался
по этой инструкции делали? ardupilot.org/plane/docs/common-dshot.html#blheli-…
накрайняк можно и через юсб адаптер/модифиционовнный фтди регули настроить
по этой инструкции делали? ardupilot.org/plane/docs/comm...hrough-support
нет, завтра попробую. Для коптеров, где регуляторы на гребенке висят имею cc3d с клинфлаем)) на этом же коптере все запаяно в труднодоступных местах.
Сегодня на втором акке опять случился глюк баро. На третьей минуте ОСД показало 1500 метров и те же симптомы - отвал компаса, плавное снижение. Логи ТУТ. В общем, электролит не спас ситуацию. Видимо придется уходить айнав/бетафлай и учиться летать в акро))) Кстати, в общей сложности сегодня произвел более пяти возвратов домой, как по тумблеру, так и отключением аппы - все сработало четко, трижды сажал и дизармился, остальные разы подхватывал на подлете чтоб газон не косить.

Ребята. Кто летает на крыле или самолете? Ardupilot обязательно нужен компас? Крыло AR.Wing + Mini Pix от Radiolink с последней прошивкой (ChibiOS). Не хочется резать тушку и где-то на консолях размещать антенну. Так как внутри много места. Заранее спасибо за ответ!

Ardupilot обязательно нужен компас?
Нет. Успешно летают и без компаса.

Всем привет. Большая просьба посмотреть логи, квадрокоптер не переходил ни в один из автоматических режимов (не работал PosHold, loiter, RTL). Удалось вернуть вручную после перезагрузки пульта. Есть ошибки, но мне совсем не понятно откуда ноги растут. Заранее спасибо откликнувшимся.
cloud.mail.ru/public/2NYi/n9BahYxb2

Прошу помощи, выручайте что крутить: I, или D?. Почти разобрался почему падает, но дальше тупик в знаниях и ремонта не оберусь, пост с видео чуть выше №5973. Настраивал Rate P в полете, чуть выше задираю - падает, ниже тоже, на среднем значении держится, но на малейшее отклонение по Pitch и Roll немного подкачивает и если нормально качнуть, да даже немного, тут-же резко падает. Вот и думаю, раз ему пофиг на изменения параметра Rate P, то тут уже похоже надо крутить I, или D. Вообщем не знаю куда дальше копать 😦 Прошу подсказки какой параметр трогать в первую очередь и примерно на сколько процентов понизить, или завысить для начала, без крэша 😃, ну а потом если будет хоть как-то держать, то пустить в ход autotune. ВМГ конечно слабенькое, где-то на 60% взлетает, моторы turnigy 2217 860kv, регули turnigy plush 25A, пропы 11х4,7, акб 3S, прошивка новейшая

если нормально качнуть, да даже немного, тут-же резко падает.
Посмотрите на RCOU в логе - 4-ый мотор всю дорогу крутит больше остальных - центр тяжести не там ? или с пропеллером проблема ?
Под конец (между 39.0 и 39.2) график 4-го уходит в потолок , 3-го вниз - пытаытся выровняться ? или наооборт перекомпенсирует ? (на видео не очень понятно где зад, где перед)
попробуйте ноги снять и батарею поменьше поставить (если есть ) , взлететь и посмотреть как облегченный вариант себя вести будет.
Может последовательность подключения моторов перепутана. Попробуйте дрон в руках заарамить он вообще правильно сопротивляется, если его наклонять ?
если бы моторы были неправильно подключены, он бы переворачивался сразу, при попытке взлететь.
(*в режимах со стабилизацией*)
Рама 560, раз после выравнивания покачивает, то подозрение что нужно увеличивать rate d, моторы старенькие, пропы не маленькие, как слон взлетает. Только мне не понятно, нужно цифры в Rate D уменьшать чтобы увеличить дозирование, или наоборот? Как мне показалось то он получше себя ведет на rate p 0,180 от штатных 0,135 Надо его привязать чтоли, а то травка не помогает, детали кончаются ))
Рама 560
кокой вес при этом ?
Как правило, пикс может вполне уверенно летать на дефолтных пидах . По крайней мере достаточо стабильно, чтобы можно было взлететь и выполнить автотюн.
Тот факт, что он у вас валится постоянно, говорит о том, что что-то фундаментально не так, и пиды крутить, имхо, рано и бессмысленно.
Скорее (чаще) всего коптер просто слишком тяжелый для вмг, плюс ситуация с 4-м мотором непонятная, хотя может я и наговариваю…
кокой вес при этом ?
Как правило, пикс может вполне уверенно летать на дефолтных пидах . По крайней мере достаточо стабильно, чтобы можно было взлететь и выполнить автотюн.
Тот факт, что он у вас валится постоянно, говорит о том, что что-то фундаментально не так, и пиды крутить, имхо, рано и бессмысленно.
Скорее (чаще) всего коптер просто слишком тяжелый для вмг, плюс ситуация с 4-м мотором непонятная, хотя может я и наговариваю…
Уже не помню, примерно 1800-1900гр., сейчас нет возможности взвешивать, вечером вышлю ещё один лог, если пойму какой. Давненько летал на другой прошивке в той же конфигурации и только rate p трогал и был примерно такой же, дык gopro ещё с подвесом надевал, там чтоб его уронить хорошо потрести нужно было туда - сюда. Сейчас блин прикоснуться к крену страшно

Всем привет, помогите новичку…
Перешел из вертолетов в дроны ))
Собрал квад на Pixhawk 2.4.8 все летает, всем доволен, но на пиксе после прошивки в МП перестал гореть основной светодиод (который большой), при этом, если подключить внешний по I2C, то внешний работает…
Может штатный светодиод где то включается в настройках ???
дык gopro ещё с подвесом надевал, там чтоб его уронить хорошо потрести нужно было туда - сюда. Сейчас блин прикоснуться к крену страшно
Ну тогда проверять пайку / соединения силовых проводов , начиная с 4-го мотора (я правильно понимаю - он заваливается назад и направо ?) .
Проверить болты которыми мотор прикручен - не заходят ли слишком глубоко и не касаются ли обмотки.
Если ничего не обнаружится , то пробовать менять ESC / мотор. Если запасных нет , то хотябы просто перекинуть на другие (разные) лучи , посмотреть переедет ли проблема вслед за мотором или контроллером…
Вот лог к видео в посте № 6004 cloud.mail.ru/public/2aJL/XoqaiMG1D Один мотор действительно себя странно вел 1 раз, крутился с малой скоростью от остальных при запуске, перезагрузился и норм. Из двух падений ломался один и тот же мотормаунт передний правый
Господа, прошу помощи ! Сегодня начал испытывать своего монстра и… Сначала думал, что он падает, но потом понял, что он переходит в режим посадки и садится. Т.е. взлетаем, летаем 1-2 минут, потом дрон перестает слушаться стика вверх/вниз (остальные направления в норме) и садиться. Менял несколько аккумуляторов. Отключил все FS. Поменял батареи в аппаратуре (отлетал метров на 10-20 максимум). Режимы (стабилайз, альтхольд, лоитер) - без разницы. Ничего понять не могу. Смотрю логи последних трех взлётов… пока соображали не хватает осилить причину 😃 Если у кого будет свободная минутка, буду очень благодарен… Логи тут drive.google.com/open?id=1EgRhbpbnIuYa0ByRfOikufxg…
Коптер
Pixhack v3
Прошивка APM