Вопросы новичка

Хотелось понять просто есть ли в ней смысл, защищает от помех? Как компас с ней себя ведет?
да вроде помех нет, хотя каких то особых улучшений не заметил…
Хотелось понять просто есть ли в ней смысл, защищает от помех? Как компас с ней себя ведет?
Нормально ведет. Не унитазит.
Не складная, но размер более компактный, поэтому коптер влезает в рюкзак.
И еще, т.к. верхняя чашка просто накручивается на ножку, то прорезь для провода может оказаться где угодно, это не очень удобно. Я в основании чашки просверливал боковое отверстие, нарезал резьбу М3 и вкручивал установочный винт, чтобы фиксировать в нужном положении.
И еще, их есть два вида, один потолще-побольше (как у вас на фото), а другой потоньше-поменьше, мне он больше нравится. но сейчас они из продажи почти исчезли и стоить стали больше 300 руб.
По ошибке задал вопрос не в той теме, лучше перееду сюда, чтобы флуд не продолжать. Суть здесь: rcopen.com/forum/f123/topic276142/29214. Регули калиброваны. В дополнение - настройки blheli.
Логи падений, к сожалению, не сохранились (на spracingf3 был переполнен blackbox, и я там нужного полета не нашел, а matek записал файл полный символов “U” безо всяких данных). Сегодня отлетал опять по батарейке и на том и на другом, падения, как назло, не случилось (сегодня теплее и резинки не дубеют?). Но заметил возможную причину - когда я гоняю его вверх-вниз на максимальных, в верхней части петли throttle уходит в ноль, и так как у меня по какой-то причине на 250 min_throttle=0, моторы вырубаются вообще, а когда я снова даю газу, они включатся не одновременно и с разной задержкой (но регули калиброваны). Как я заметил, это приводит к тому, что когда они все-таки все включаются (режим horizon) и квад выравнивается, он оказывается повернут по яву (что я и наблюдал на кваде 220). В принципе, если газ дать посильнее и один включится не сразу, а остальные сразу и на полный газ, это как раз и приведет к флипу через один мотор (что я и наблюдал на кваде 250).
Логи сегодняшних полетов: greg.southural.ru/i/220-BTFL_BLACKBOX_LOG.BBL greg.southural.ru/i/250-LOG00003.BFL
Что попробовать поменять, чтобы проблему диагностировать? Поставить min_throttle побольше? В настройках blheli поменять motor timing? Вообще попробовать другую прошивку на регуляторы?
просто есть ли в ней смысл, защищает от помех?
На самом деле - нет. Эти штуковины больше для самоуспокоения…) От электромагнитных помех защищает только расстояние, вибраниум и правильная укладка проводов в коптере.)
У спецов считается, что лучше бороться с источником помех, а не защищать от них “приемник”. То есть, силовые провода должны быть определенного сечения, должны быть уложены в определенном порядке(чтобы взаимно компенсировали возникающие поля), плюсы и минусы должны располагаться параллельно друг другу, на как можно меньшем расстоянии. В идеале - коаксиально(плюс внутри минуса). Ток по этим проводам должен течь равномерный, без особых всплесков и перепадов. Равномерное магнитное поле учитывается при калибровке, всплески и перепады не учитываются. Избавиться от них, или уменьшить, можно установкой конденсаторов рядом с потребителем(регулятором, например), а если провода длинные, то на каждые 15 см длины можно поставить конденсатор на 100uF…
Теперь главное: Поскольку на коптере не так много места, да и вес лишний ни к чему, можно ограничиться только укладкой проводов, регули взять с уже имеющимися конденсаторами и отодвинуть компас как минимум на 10 см от них… Вообще, мощность электромагнитного излучения снижается пропорционально квадрату расстояния, увеличили расстояние в 2 раза, мощность упала в 4 раза.
С другой стороны, полно картинок, где модуль ГПС/компас установлен достаточно близко… У меня было так… rcopen.com/files/5c4465b799707300778226fa
так как у меня по какой-то причине на 250 min_throttle=0, моторы вырубаются вообще
AIRMODE включен?
Min_trottle рекомендую выставлять так, чтобы моторы уверенно крутились с пропеллерами.
AIRMODE включен? Min_trottle рекомендую выставлять так, чтобы моторы уверенно крутились с пропеллерами.
Включен, но я летал в ANGLE. Но ведь в любом режиме ему может понадобиться остановить мотор/моторы, и потом запускать синхронно? И если они синхронно не стартанут - беда?
Нет ни одного режима в котором необходимо останавливать моторы. Это не самолёт, так что провеллер в нормальном режиме всегда должен создавать подъемную силу. Если говорить о фристайле - также остановка моторов не допустима, так как моторы не могут стартовать синхронно в связи с погрешностями изготовления двигателя и регулятора.
На самом деле - нет. Эти штуковины больше для самоуспокоения.
Спасибо Вам за совет!
Привет народ, вопрос по R9 mini. Интересует подключение к Pixhawk, что куда подпаивать и куда подключать!?
ibb.co/TKYnHqR
Подскажите, где найти инфу по мануалам fpv-передатчика Eachine ts5823s. По какому из мануалов настраивать каналы?
По какому из мануалов настраивать каналы?
Они одинаковые, просто с разных сторон смотреть.
Они одинаковые, просто с разных сторон смотреть.
обратил внимание, что зеркальное отображение. Вопрос возник после того, как по кругу прогнал все варианты и не нашел сигнала. После чего нашел следующую схемку
начал гонять по ней, зацепился за частоту, где что-то бликовало. После чего решил поменять usb-шнурок и заработало. Шнурок с комплектным передатчиком оказался битым.
Извиняюсь за дилетантский вопрос, но погуглив ответа не нашел, поэтому решил спросить здесь.
Есть два способа триммировать квадрик.
С помощью триммеров-переключателей возле стиков:

И с помощью самих стиков:
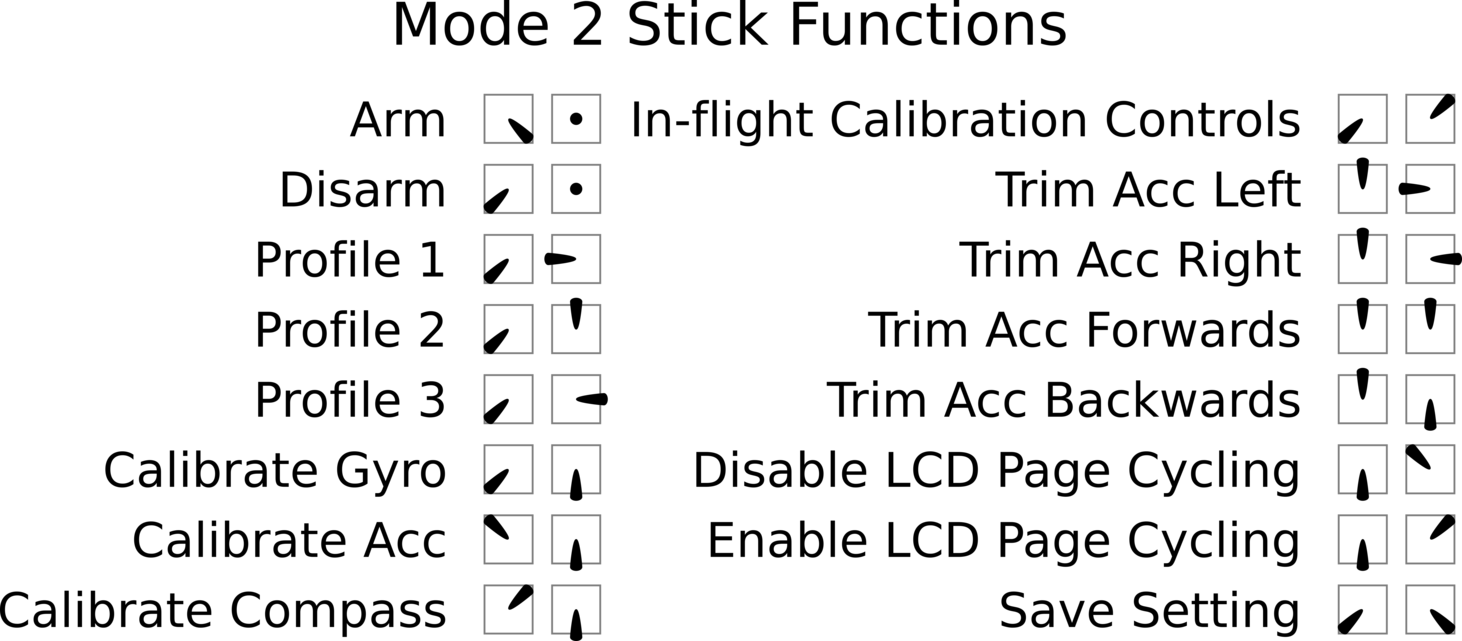
Как правильно?
Юлиан в своих видео рекомендует триммировать стиками.
Почему?
Какие достоинства и недостатки обоих способов?
Почему?
Потому что переключатели возле стиков триммируют аппу, а не квадрик…
Это не рекомендуется для квадриков в принципе.
это о каком контроллере речь?
Есть два способа триммировать квадрик.
Какие достоинства и недостатки обоих способов?
Триммирование квадрика в принципе порочная практика.
Если квадрику требуется триммирование, значит либо какая то проблема с физикой (рама кривая, моторы разные, регули не откалиброваны), либо квадрик не откалиброван, либо не исправен.
Если все же лень разбираться, то триммировать можно только настройками полётного контроллера (в вашем случае стиками). Вводить дополнительную ошибку в исходные данные полётного контроллера - триммеры аппаратуры, вообще за гранью.
это о каком контроллере речь?
У меня F405-STD, если это имеет значение 😃.
Если квадрику требуется триммирование, значит либо какая то проблема с физикой (рама кривая, моторы разные, регули не откалиброваны)
А также, я полагаю, что погрешности центра тяжести неизбежны 😕. И, хотя бы для этого, требуется триммирование.
А также, я полагаю, что погрешности центра тяжести неизбежны 😕. И, хотя бы для этого, требуется триммирование.
Если контроллер не отрабатывает погрешности центра тяжести, значит он или не откалиброван или не исправен и требует замены. В любом случае это физические проблемы квадрика.
Есть еще вариант, повышенные вибрации влияющие на гироскоп и акселерометр, к триммированию тоже ни какого отношения не имеют.
Давайте уясним раз и навсегда.
На квадрокоптерах триммуруется не контроллер. А прошивка, точнее математическая модель квадрокоптера.
Поэтому читайте как триммировать в описании прошивки автопилота.
Триммеры на аппаратуре нужны для самолетов в ручном управлении.
И так понятно, что в одном случае триммируется аппаратура, а в другом контроллер.
Все ответы выше по сути говорят, что так надо. И никто не сказал: почему и в чем разница. Если у меня только один квадрик и только одна аппаратура, то какая разница где я стриммирую.
Видимо, никто не знает. 😦
И ещё. Как после триммирования контроллера стиками узнать уровень триммирования?
При триммировании на аппаратуре уровень триммирования виден на экране аппы. И по тем значениям можно оценить степень триммирования и вернуть в исходное.
А как это узнать при триммировании стиками?
А также, я полагаю, что погрешности центра тяжести неизбежны . И, хотя бы для этого, требуется триммирование.
У меня квадр прекрасно летает при смещении центра тяжести на 9 см на 1,5 кг если не поставить полезный вес а летать лишь с акком
Он просто этого не замечает, хотя нагрузка на двиги конечно разная.