Подвес камеры на бесколлекторных моторах на Alexmos/Basecam

Есть ли у кого опыт эксплуатации вот такого подвеса.
Нигде не могу найти к-либо документации на его подключение, и ПО для настройки.
Если крутить подвес в руках - все движения отрабатывает на отлично. Устанавливаешь на коптер - начинается дикая свистопляска.
рама - ATG 650:



Мозги - NAZA.
Винты 12x3.8 карбоновые, отбалансированы на магнитном балансире.
Лучи от штатной рамы выкинул и заменил на дюралевый квадратный профиль 15x15.
Может подвес чудит ?
Устанавливаешь на коптер - начинается дикая свистопляска.
Тут много причин может быть. Например, у меня были жуткие вибрации (резонанс) по оси yaw. Удалось убрать изменением числа резинок виброразвязки. Осталось 4 из 12. Еще у Вас, кажется, подвес попадает под поток от винтов - это очень для него трудные условия.
первое, винты вверх поставь, у тебя вибрация на датчик такая хренячит что он с ума сходит, пиды дома все настрой, наверное контроллер какой нить говняный с датчиком судя по всему
Винты изначально вверх стояли: при этом - трясло саму платформу. С точки зрения здравого смысла как то не логично ставить винты в тянущем режиме, т.к. лучи будут находится в возмущенном потоке от винта. Сами лучи не имеют никакого аэродинамического профиля (они обычно круглые или квадратные в сечении) при этом куча полезной энергии просто будет расходоваться в пустую, в том числе на создание осциляций самого луча.
Крутить пиды - это конечно круто, звучит почти как RTFM 😃
Я как раз и задал вопрос про то, чем же эти пиды можно крутить. Был бы софт и документация - я бы не стал задавать глупых вопросов.
Еще один непонятный вопрос если вибрации лезут на датчик подвеса, то почему его жестко так “подклинивает” только по одной оси - pitch на roll это никак не сказывается.
Тут много причин может быть. Например, у меня были жуткие вибрации (резонанс) по оси yaw. Удалось убрать изменением числа резинок виброразвязки. Осталось 4 из 12. Еще у Вас, кажется, подвес попадает под поток от винтов - это очень для него трудные условия.
Спасибо, надо будет попробовать.
По поводу “подвес попадает в поток от винтов” (тоже была такая мысль), проверял следующим образом: крутил коптер в руках на полном газу, при этом картинка была точно такая же как если бы винты не вращались.
Крутить пиды - это конечно круто, звучит почти как RTFM
Я как раз и задал вопрос про то, чем же эти пиды можно крутить.
А контроллер подвеса какой?
А контроллер подвеса какой?
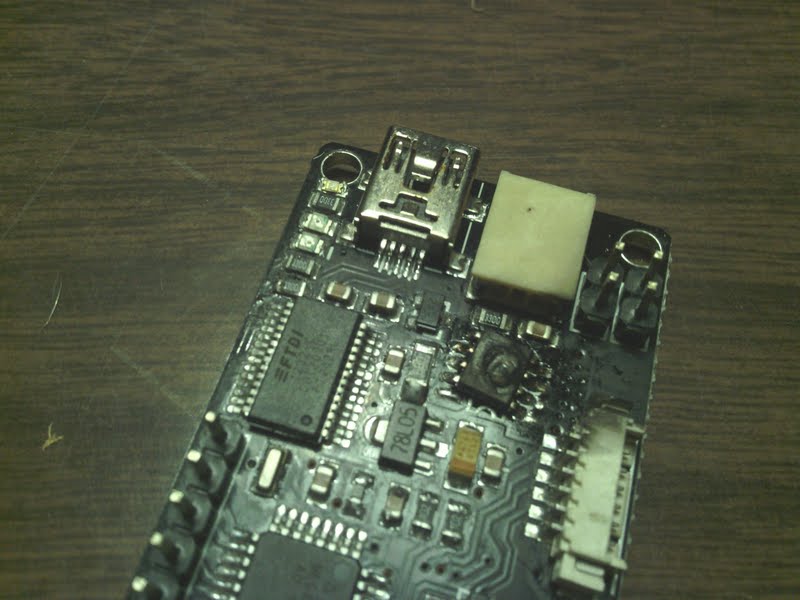
Да вот самому интересно знать. Разобрать - не разберешь. Там две платы спаяны между собой через разъемы: на одной судя по всему установлены ключи для моторов, а вот на другой мозги. Когда заказывал, наивно полагал, что в комплекте будет к-либо документация и ПО, но в итоге получил вот такую балалайку у которой даже разъем питания никак не промаркирован.
Теперь остается лишь надеяться на то, что владельцы аналогичного подвеса найдутся и откликнутся.
Да вот самому интересно знать.
USB-разъем на контроллере есть?
Коллеги нужна ваша помощь! Есть 3х осевой подвес и контроллер AlexMos 32бит. не могу понять куда копать, какие настройки еще попробовать. Не стабилизирует нормально, постоянно уходит горизонт, причем на 8 бит все работает нормально, рама и подвес тот же. Настройки ПИДов у меня такие P=20 I=0.1 D=15 на все осях, фоломи только на YAW, с ней тоже не понятки поворачиваю раму, подвес начинает движение за ней, останавливаю раму, подвес немного перекручивает а потом начинает возвращаться назад как-бы ищет нулевую точку рамы и чем резче поворачиваю раму те чаще колебания по оси YAW вблизи нулевой точки
Коллеги нужна ваша помощь! Есть 3х осевой подвес и контроллер AlexMos 32бит. не могу понять куда копать, какие настройки еще попробовать. Не стабилизирует нормально, постоянно уходит горизонт, причем на 8 бит все работает нормально, рама и подвес тот же. Настройки ПИДов у меня такие P=20 I=0.1 D=15 на все осях, фоломи только на YAW, с ней тоже не понятки поворачиваю раму, подвес начинает движение за ней, останавливаю раму, подвес немного перекручивает а потом начинает возвращаться назад как-бы ищет нулевую точку рамы и чем резче поворачиваю раму те чаще колебания по оси YAW вблизи нулевой точки
Для начала www.basecamelectronics.ru/company/blog/show/?newsi… затем доверие гироскопу от 33 до 80. чувствительность гироскопа не вкл. на яв пиды 8-0-6 при режиме следуй за мной. попробуй пока это потом продолжим.
Пробовал подключать
Надо попробовать разные версии и того и другого. Какой-то вариант должен признать за свое, я думаю. Драйверы кроме Silabs могут быть FTDI.
Приветствую! Только что сжёг контроллер. Звать Quanum. Официальный, вроде как, AlexMos. Подключил на столе к батарее подвес, полез соединять USB кабелем , причём кабель не был воткнут даже в компьютер. Чуть дыму, повоняло. Что самое обидное, я так и не понял причины. “Что я делаю не так?”. Батарею проверил - всё с ней в норме. В субботу несколько полётов провёл- всё работало. При повторной попытке включения: горит только красный светодиод, не пищит, пару раз дёргает мотором ролла. Из GUI не соединяется.
Вопрос к сообществу : кто-либо занимается починкой контроллеров за плату?
USB-разъем на контроллере есть?
Вот, кой чего нарыл на RC groups:
Собственно там тоже народ находится в замешательстве и не знает к чему эту балалайку можно подключить.
К сожалению ответов я там не смог найти. В конечном итоге народ закупает какую то новую модель подвеса, где уже “все хорошо” и все компоненты расположены на одной плате:

Для начала www.basecamelectronics.ru/company/blog/show/?newsi… затем доверие гироскопу от 33 до 80. чувствительность гироскопа не вкл. на яв пиды 8-0-6 при режиме следуй за мной. попробуй пока это потом продолжим.
Скажите, эти рекомендации подходят только для 32–битной версии?
Виталий, я почти уверен, что хватит только одной ссылки от Сергея. Ссылка подходит ко всем контроллерам! Но только если ко всем пунктам отнестись предельно серьезно и не перепрыгивать на следующие рекомендации не поняв предыдущие. 32 битная плата действительно хороша! К ней претензий быть не может. …Еще, тут постоянно пишут о D=0.01. Поиграйся, реально помогает.
У меня вопрос: Подскажите, что делаю не так? Не работает кнопка на джойстике! Джойстик только в одном состоянии - При отклонении стика джойстика, камера штатно идет за ним. При отпускании возвращается в исходное положение. Нужно что бы при отпускании стика камера фиксировалась, а не шла обратно в исходное состояние. Может как-то хитро надо нажимать кнопку в момент работы?
Еще. Джойстик работает как-то резко, и только в пропорциональном режиме. в инкрементальном режиме камера просто задирается вверх до упора и начинает бится в конвульсиях. Подскажите как исправить? Или ткните на ссылку где описана настройка. У меня действительно с поиском большие проблемы.)))
Не подскажите, заказал подвес под гопро, когда получил от продавца, подключил его, через секунд 5 он стартанул, но по одной оси он постоянно дергается. Продавец сказал что это потому что без камеры, нужно установить камеру и после этого он заработает как нужно. Это правда?
Это правда?
да, и чем точнее сбалансирован подвес с УСТАНОВЛЕННОЙ камерой - тем лучше
Чота баловался…

Чота баловался…
Что за моторчики?
Чота баловался…
Ты полгода где то баловался аж скучно стало.😁😛
Скажите, эти рекомендации подходят только для 32–битной версии?
Да.
Еще. Джойстик работает как-то резко, и только в пропорциональном режиме. в инкрементальном режиме камера просто задирается вверх до упора и начинает бится в конвульсиях. Подскажите как исправить? Или ткните на ссылку где описана настройка. У меня действительно с поиском большие проблемы.)))
установи мин и макс угол отклонения 45 гр затем скорость 4 сглаживание 3 и режим инкрементальный. посмотрим что будет.
Что за моторчики?
Тайгеры перемотаные
Тайгеры перемотаные
Чет они пустые без обмоток.