Вопросы по iNav

Мне б кто раз показал
Когда я собирал свой первый коптер, я из всех терминов знал только “хоббикинг” и видел по телевизору Паррот ардрон первой версии. На форуме я зарегистрировался через полгода после первого полета…) Пока ждал следующий набор комплектухи с хоббикинга…)
Если вы начинающий пилот и хочется чего-то ещё более безопасного, подойдёт режим Angle. В нём стабилизация не отключается, вдобавок ПК не даст наклонить квадрокоптер свыше заданного угла
Разве этого недостаточно?
Ну мне оказалось проще… Интернет уже во всю. Форумы всякие. 😃
Хотя первого я купил без форумов. Что-то так загорелось, что донемогу. Купил, пару раз на деревья лазил… потерял 😃
А здесь зарегистрирован был давно т.к. в то время какие-то ссылки вели сюда… Может по ЧПУ, может еще причины были.
Разве этого недостаточно?
В общем достаточно, просто смотрю видео других владельцев, а там еще другие режимы, и про них тоже говорят “лучше сразу включить, т.к. …” и далее по смыслу. Но пока сам не попробуешь понять конечно сложно. А тут, тема самая что ни на есть близкая, вот и хотелось “вооружиться по полной”. Изучаю мало того новую для многих прошивку, так еще с нуля для себя.
Какой Вы меркантильный…
А куда деваться, если китаец продал 8-ку, а прислал 7-ку? Мошенники должны быть наказаны!
8й, конечно, современнее, но особого профита не даст, кроме избыточности спутников
Плюсы 8-ки (из практики) - гораздо более высокая точность, чем у 6-7 серии (менее метра); огромная избыточность спутников - однозначный плюс. Если коптер теряет спутники при возврате домой - он сядет там где был и мне, например, не хотелось бы, чтобы это случилось в 1.5км от меня. У меня что 6-ка, что 7-ка теряли часть спутников на скоростях выше 60-70 км/ч, независимо от настроек. 8-ка пока держится.
для первого старта какие_какой режим должен быть включен для максимума стабильности
Для первого полета - только ANGLE.
Остальное - улучшения, которые заметны только если рука набита и коптер настроен.
Посмотрел, у него задние моторы на максимум взвывают, а передний один до трети, а один почти не стартует.
Все правильно, он пытается выровнять аппарат, который, скорее всего наклонен чуть назад.
убрав газ он по идее должен был бы снизить обороты до минимума и не взлетать ну или плавно опуститься
Кому должен? 😉 В полете все будет плавнее - в полете аппарат будет способен делать то, что хочет от него полетный контроллер.
Он же так будет плюхаться на землю
Будет. Насколько сильно - зависит от того как высоко газ убран в ноль 😃
отклонение максимум 1,5-2 градуса
ПК пытается выровнять аппарат и не видит результата от малого изменения оборотов моторов, вот и старается изо всех сил.
смотрю видео других владельцев, а там еще другие режимы, и про них тоже говорят “лучше сразу включить, т.к. …”
Все это советы профи или “профи”. Прежде чем что-то включать - надо добиться того чтобы аппарат полетел. Тот же AIRMODE действительно лучше включать, нюанса тут два - 1) он может дать неадекватное поведение при минимальном газе, если пилот опытный - проблемы нет, а новичок может растеряться; и 2) он не имеет смысла если включен MOTOR_STOP - о какой стабилизации при нулевом газе может идти речь, если моторы остановлены.
Мошенники должны быть наказаны!
Думаю так же. К тому же, он уже поинтересовался “сколько я хочу” ))
Все правильно, он пытается выровнять аппарат, который, скорее всего наклонен чуть назад.
С этим понятно и жду регуляторы. Бум проверять на деле. 😃
Будет. Насколько сильно - зависит от того как высоко газ убран в ноль
А как сделать так, чтобы я мог ну прямо в сантиметре от земли зависать (ну или плавно плавно садиться, не ломая ноги, как делал на коробочном варианте, он и у земли довольно устойчиво вёл себя, правда барометр отсутствовал). Конечно утрирую, но хотелось бы более-менее плавно садиться.
Прежде чем что-то включать - надо добиться того чтобы аппарат полетел.
Жду зряпчасти и в небо, а потом рюшечки.
АИР мод - он не имеет смысла если включен MOTOR_STOP - о какой стабилизации при нулевом газе может идти речь, если моторы остановлены.
На том же сайте (откуда цитата выше была), написано:
Кстати, если у вас включена остановка моторов при нулевом газе (опция MOTOR_STOP во вкладке Configuration) и одновременно с этим работает AIRMODE, то остановки моторов не будет, так как AIRMODE имеет более высокий приоритет.
Короче мне он пока не нужен, т.к. я скорее буду первый стар делать с мотор стоп, ну мало ли вдруг он слишком резво стартовать начнёт, а я не привяжу. )
Сейчас, при очередном “обходе” в конфигураторе настроек, коптер стоял на столе, где спутники поймать не мог, о чём свидетельствовала красная пиктограмма 3D fix, однако… через какое-то время я случайно тумблер щёлкнул (временно арм на тумблере), и контроллер радостно известил меня об арме. Ну и дав “газу” мотор зажужжал. Вот. Что-то он расслабился. )
А как сделать так, чтобы я мог ну прямо в сантиметре от земли зависать
Для этого нужен сонар. В планах уже больше года 😁
но хотелось бы более-менее плавно садиться.
Настроить ПИДы и удержание высоты. С включенным удержанием высоты садится очень плавно. Либо тренироваться, я в большинстве случаев руками плавно сажаю.
Кстати, если у вас включена остановка моторов при нулевом газе (опция MOTOR_STOP во вкладке Configuration) и одновременно с этим работает AIRMODE, то остановки моторов не будет, так как AIRMODE имеет более высокий приоритет.
Разные прошивки - разное поведение. INAV ведет себя по-другому. MOTOR_STOP на то и MOTOR_STOP, что останавливает моторы при нулевом газе.
Ну и дав “газу” мотор зажужжал.
Не настроено никаких режимов, которые требовали бы GPS, вот он и не видит смысла ждать фикса.
Не настроено никаких режимов, которые требовали бы GPS, вот он и не видит смысла ждать фикса.
Я понял, позже полез в закладку, а там… все режимы с ЖПС действительно слетели. Но они были(!), я даже на пульт уже бумажки прилепил чтобы не запутаться ))
Какой датчик тока посоветуете для SpRasing F3 ?
Вот в этом обзоре аппаратуры человек установил какой-то сенсор, я на бангуде находил много чего, но в использовании ни один не испытывал, не могу подсказать точно. На али их тоже полно, отложил пару в корзинку на будущее.
Скажите, с пульта почему может не армиться? Спутники нашлись 8шт, всё зелёное. Я убрал с тумблера арм (тумблером армится легко), но никак не могу победить именно стиком. А вроде раньше получалось.
И еще по режимам… ANGLE не работает совместно с HORIZON ? они взаимоисключающие? И как быть, когда на одном тумблере, например МАГ, а при включении другого активизируется еще и например ALTHOLD ?
Если блакбокс убрать с полетного режима (с тумблера), то он не будет активироваться или будет активироваться автоматом при старте?
то он не будет активироваться или будет активироваться автоматом при старте?
При арминге будет начинать писать лог.
Какой датчик тока посоветуете для SpRasing F3?
Для какого контроллера - особого значения не имеет. В первую очередь датчик тока должен быть рассчитан на максимальное токопотребление коптера.
У меня подключен PowerModule от APM, который по совместительству еще и датчик напряжения.
Я убрал с тумблера арм (тумблером армится легко), но никак не могу победить именно стиком.
Левый стик вправо при газе в минимум? Смотрите раскладку каналов (верная ли стоит) и сколько расход канала yaw в крайнем правом положении (настройте аппу чтоб каналы управления показывали: 1000 минимум, 1500 среднем положении стика и 2000 максимум.).
Скажите, с пульта почему может не армиться?
Арминг Throttle низ, Yaw вправо. Может минимальное кол-во спутников больше 8?
Если блакбокс убрать с полетного режима (с тумблера)
Должен при арминге начаться запись логов.
По поводу режимов не подскажу
У меня подключен PowerModule от APM
Провода я таки понимаю нужно будет перепаивать? Киньте ссылку пожалуйста, какого типа нужно искать
Провода я таки понимаю нужно будет перепаивать? Киньте ссылку пожалуйста, какого типа нужно искать
На PM используются два типа проводов - силовые и сигнальные. Если вопрос о силовых, то это от сетапа коптера зависит. У меня, например, 12AWG - 680 квадр, хотя по логам более 54А не наблюдал. В качестве сигнальных можно любой провод использовать, хоть из шлейфа IDE от компьютера.
На PM используются два типа проводов - силовые и сигнальные.
С силовыми то понятно. Где у этого модуля выход от датчика тока и куда его подключать? И можно ли его еще и использовать в качестве бека (там же 5.3 В вместо 5 которые нужны)?
Это верная распиновка ?
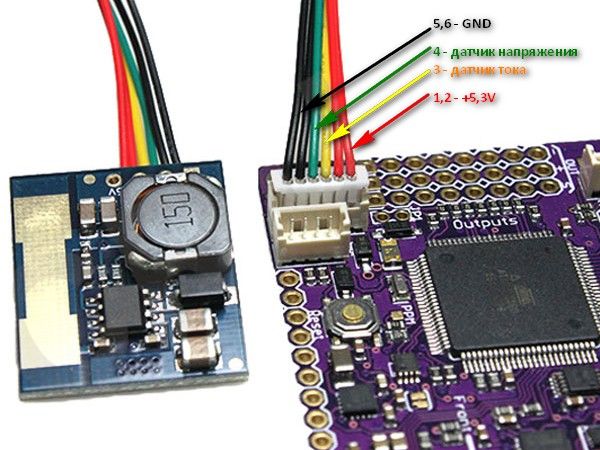
Где у этого модуля выход от датчика тока и куда его подключать?
Это уже лишний вопрос, достаточно погуглить пару картинок и увидеть, что все пины подписаны.
И можно ли его еще и использовать в качестве бека (там же 5.3 В вместо 5 которые нужны)?
Не могу советовать. Мой экземпляр выдает 12 вольт на выходе)
И не факт, что будет 5.3в. Опять же, напряжение указано без нагрузки. Что будет если запитать от него GPS, телеметрию, OSD… Возможно напряжение просядет, а если не просядет, то диод Шоттки в помощь.
Это верная распиновка ?
Не факт, что продавец отправит именно то, что на фото. Или цвета проводов будут теми же. См. ответ на первый вопрос.
достаточно погуглить пару картинок и увидеть, что все пины подписаны
Наверно последний вопрос по этой теме: искать по словам “Модуль питания APM”? Или есть с выходом от датчика тока для Naze 32 и т.д. искал, но попадались только обычные беки на 5 В
Левый стик вправо при газе в минимум?
Да так и делал (да куда только я его уже не “того” ) Вроде получалось вчерась…
Каналы нормально, 1000 - 2000, как в аптеке.
Может минимальное кол-во спутников больше 8?
Спутники в кли посмотрел, 6 вроде ограничение (попробую вообще отключить). Да и сигнал контроллер издаёт, что типа “пора лететь” 😃
У меня что 6-ка, что 7-ка теряли часть спутников на скоростях выше 60-70 км/ч
Это я уже на себе испытал с 7. Газанул по прямой ~100 км\ч, все спутники растерялись. Сбросил газ и они вернулись, но сомнения в мыслях уже закрепились.
Разные прошивки - разное поведение. INAV ведет себя по-другому. MOTOR_STOP на то и MOTOR_STOP, что останавливает моторы при нулевом газе.
А вот это интересно. То есть, если включен мотор стоп и Эир мод, то коптер всё таки будет просто падать на убранном газу?
В бэтафлайте я вкючаю мотор стоп (чтобы не крутились при арме) и эирмод совместно с акро режимом(то есть не постоянно).
В посадке с включенным Эирмоде вообще не вижу никакой проблемы. Да прыгает. А зачем смотреть как он прыгает? Коснулся земли - дизармнул тумблером, либо переключил режим на тот где Эирмод не задействован.
С армом проблема решилась. Как всегда “сам д…виноват”. Вчера пытался для симулятора настроить, переключил пульт в модель2, там поменял стики. Думал они только там поменялись, а переключил на коптер сегодня и не глянул на стики. Вот.
В посадке с включенным Эирмоде вообще не вижу никакой проблемы. Да прыгает. А зачем смотреть как он прыгает?
Я извиняюсь, что затронул эту тему. Думаю понимание и выбор режимов придёт с опытом. Это я от безделья и невозможности опробовать столько тут вопросов назадавал… Конечно можно дизармить да и всё (я в общем то так и делал на первом, т.к. четко “как в кино” садиться не научился), мне просто хотелось понять заранее, какой режим для чего и с чем лучше включать. Ведь один тумблер может быть включен в горизон (почему без Т?), второй влючается в альтхолд, а первый то включен… как они совместно ведут себя? Вот такие тонкости мне не понятны.
Есть режимы которые могут работать совместно. Тот же Air mode с Angle, Horizon, Acro (в INav много что может работать совместно с чем-то). А есть режимы взаимоисключающее - Angle и Horizon одновременно включены быть не могут.
горизон (почему без Т?
Потому что на “вражеском”, как вы говорили =)
Наверно последний вопрос по этой теме: искать по словам “Модуль питания APM”? Или есть с выходом от датчика тока для Naze 32 и т.д. искал, но попадались только обычные беки на 5 В
Если коптер малого размера, то можно взять PDB со встроенным датчиком тока.
Варианты:
banggood.com/CRIUS-ARPDB-5_3V-3_5A-1MHz-DC-DC-PDB-…
banggood.com/Realacc-HUBOSD-ECO-H-Type-wSTOSD8-Cur…