Вопросы по iNav

Владельцам MATEK F405-CTR.
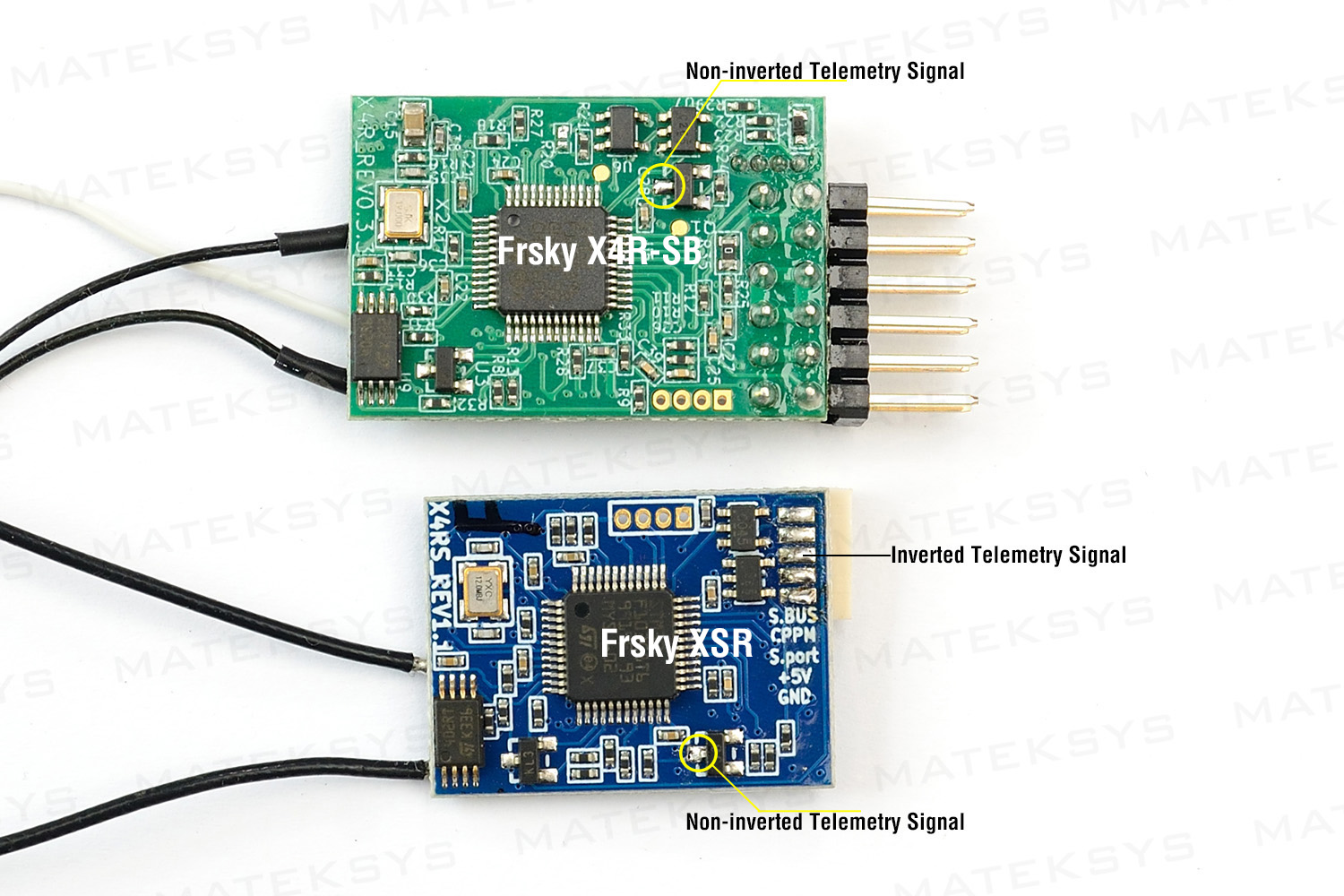
Как телеметрию на таранис завести? Как я понял надо программный инвертор включить на софт сериал. Но пока ничего не выходит.
Проще на плате приемника найти не инвертированый сигнал и подцепится туда и завести на любой TX.
X8R. Там сложнее, как понял.





Собрал inav 1.8 на отличный пк Holybro Kakute F4 V2 AIO (не хуже, а может быть и лучше чем Matek F405-CTR). Все вроде бы работает, но может быть я не все глюки отловил. Желающие протестировать и помочь мне “довести до ума” можете скачать вложение(там и hex и исходники)
Почему перемычка на выход SBUS?
хм… хороший вопрос, фотки взял с забугорного форума…
вопрос
возможно это актуально для старых полетников - инвертировать сам sbus
Добрый день коллеги по хобби!
Очень долго веду неравный бой с INAVом.
То ПК были с компасом на борту (погоду показывали), то купил ПК без компаса, но почему то подключенный компас постоянно отваливался. Стал грешить на внешний компас. Купил новый модуль, подключил - то же самое. Ну решил уже до конца проверить теорию: подключил к SDA и SCL OLED-экран и активировал его в настройках конфигуратора. Итог: не работает не компас, а что то с ПК. Это значит, что у ПК есть проблемы по SDA и SCL. Заказал еще один ПК. Ну если и на нем не будет вразумительного результата, то я отказываюсь от INAV.
Но вопрос у меня вот в чем: Могу ли я этот ПК и gps (без магнитометра) использовать в летающем крыле? Там компас вроде разумно заменяется направлением движения и вычислением этого направления по GPS. Например у меня есть ОСД от Тарот, где направление на дом показывается от направления твоего движения, там в этом проблем нет и все работат, а как в INAV с этим дела обстоят?
Или другими словами: Обязательно в INAV для летающего крыла нужен компас?
Могу ли я этот ПК и gps (без магнитометра) использовать в летающем крыле? Там компас вроде разумно заменяется направлением движения и вычислением этого направления по GPS.
да, на крыле (судя по мануалу) использование компаса не обязательно, хотя и желательно.
Немного про телеметрию FrSky.
Как известно - для того чтобы использовать smartport от FrSky необходимо:
Контроллер с аппаратно инвертированным портом.
Контроллеры на процессоре F3 или F7 имеют аппаратную инверсию на всех портах.
Если контроллер на F4 смотрим инструкцию. Чаще всего ставят один аппаратный инвертор для работы s.bus. Если свободы портов с инверсией нет, то включаем softserial и уже на нем ставим инверсию программно.
И остаётся мой вариант.
Matek F405-OSD
Аппаратный инвертор на UART2, но занят s.bus.
SoftSerial в настоящее время в INAV не поддерживается.
Fport в планах только в версии INAV 1.9
Так что придется инвертировать сигнал smartport где то на пути от приемника к ПК.
Приемник XSR-E (он же XSR-M). Для него конечно существует вот такой вариант подключения: тыц. Но что то он мне не нравится.
Поэтому буду собирать аппаратный инвертор вот по этому рецепту.
SoftSerial в настоящее время в INAV не поддерживается.
Вообще? А объяснение этому “действу”, случайно, не встречали? Тут Константин давно ни о чём не писал… забил походу )
Я думал только на моём Ф3-клоне нет софтсериала из-за разводки не правильной. На омни ф4 был…
А объяснение этому “действу”, случайно, не встречали?
Звучит так: “Softserial is not supported on MATEKF405 boards at the moment.” 8 дней назад на гитхабе.
В исходниках на MATEK405 есть закомментированное упоминание softserial на S5 и S6. Но сейчас на S5 висит ледстрип.
Я пробовал убирать ледстрип совсем и восстанавливать softserial, но то моих знаний, к сожалению, недостаточно.
А, на матеке… Ну там и так портов полно… Тогда я спокоен )
Поэтому буду собирать аппаратный инвертор вот по этому рецепту.
Вообще-то это программный софтсериал с программным инвертором.
Есть вопрос по внешнему инвертору, схема которого есть на доках айнава на гитхабе. Что дает одновременное подключение RX и ТХ к инвертору?
Поделитесь пидами для 10 дюймов ого не тяжёлого. Хочу иметь отправную точку.
Что дает одновременное подключение RX и ТХ к инвертору?
Передачу в обе стороны. С одной стороны, смартпорт может дергать рх на землю, с другой стороны тх может дергать уже смарт порт на землю.
для 10 дюймов ого не тяжёлого. Хочу иметь отправную точку.
пресет и есть отправная точка.
пресет и есть отправная точка.
Хреновая она.
Друзья, на OSD у меня всегда отображается полетный режим ANGLE. Он подмешивается к другим режимам стабилизации. В конфигураторе тоже синим отображается включенный только режим ANGLE. Это можно исправить?
1.8
Покажи скрин конфигуратора с полётными режимами.
Вообще “англе” и есть режим стабилизации. И он есть во всех навигационных режимах (точнее все навигационные режимы самодостаточны и всегда со стабом уже). Не знаю, понятно ли написал.