DJI Spark - селфидрон с 2х осевым подвесом 300гр

А прога DJI GO 4 v4.2.14 потом ругаться не будет, а то я в DJI Assistant 2 понижаю, а потом прога не запускает дрон.
на 700ую не ругается , на более старых надо через дамбалдора сделать Unlock
Скоро стану обладателем сего девайса. Я очередной любитель “далеко и высоко”, и раз идет речь о прошивках, хочу спросить - на какой последней прошивке еще можно регулировать через ассистент максимальную горизонтальную скорость (через угол)?
Кстати, какие фичи были добавлены начиная с прошивки 300?
В любой доступной можно угол тангажа указать, но для Спарка оно бесполезно, для себя оставил эту затею. Изменение угла для меня ничего не дало. Риск переворота при ветре увеличивается, а скорость может больше на 1 м/с. После 55 гр вертикальной стабилизации уже не хватает и камеру срывает в пол бывает. В не спорт режиме угол недоступен, потому летать быстрее без fpv реакции камеры, со стабилизацией, не выйдет. Короче в этом плане “вот как есть” - 12м/с, 50 км/ч. Остальное от лукавого.
300тая прошивка убога. Насколько я помню там даже фото ещё не 4к разрешения. Всё фичи, которые сделали Спарк - Спарком, завезли уже потом.
Откатился в DJI Assistant 2 на 701 прошивку . Можно как в проге DJI GO 4 v4.2.14 убрать постоянное напоминание красным о новой прошивке?
По поводу waypoint миссий на спарке. Есть решение )
Здравствуйте. Будут ли работать миссии при управлении Спарком с телефона без пульта (я так так понял связь с пультом при выполнении миссий ему не нужна). Если да то останутся ли программные ограничения управления с телефона (50м высоты и 100 дальности).
Здравствуйте. Будут ли работать миссии при управлении Спарком с телефона без пульта (я так так понял связь с пультом при выполнении миссий ему не нужна). Если да то останутся ли программные ограничения управления с телефона (50м высоты и 100 дальности).
При обрыве связи с управляющим устройством - всегда RTH. Поэтому при выполнении миссии он всегда должен быть на связи. При обрыве - полетит домой, при чём по прямой от точки обыва, т.е. если вы снимали миссией огромное дерево и он залетел за дерево с потерей связи, то он полетить по RHT прямо в дерево.
Можно как в проге DJI GO 4 v4.2.14 убрать постоянное напоминание красным о новой прошивке?
Нельзя. Только патченную версия убирает проверку прошивки
При обрыве связи с управляющим устройством - всегда RTH. Поэтому при выполнении миссии он всегда должен быть на связи. При обрыве - полетит домой, при чём по прямой от точки обыва, т.е. если вы снимали миссией огромное дерево и он залетел за дерево с потерей связи, то он полетить по RHT прямо в дерево.
Нет. Вчера этот момент тестил - дрон летит спокойно по маршруту. Приложение ругается что нет связи, предлагает вернуть домой, естественно не соглашаешься, так как при появления связи, оно и направит домой.
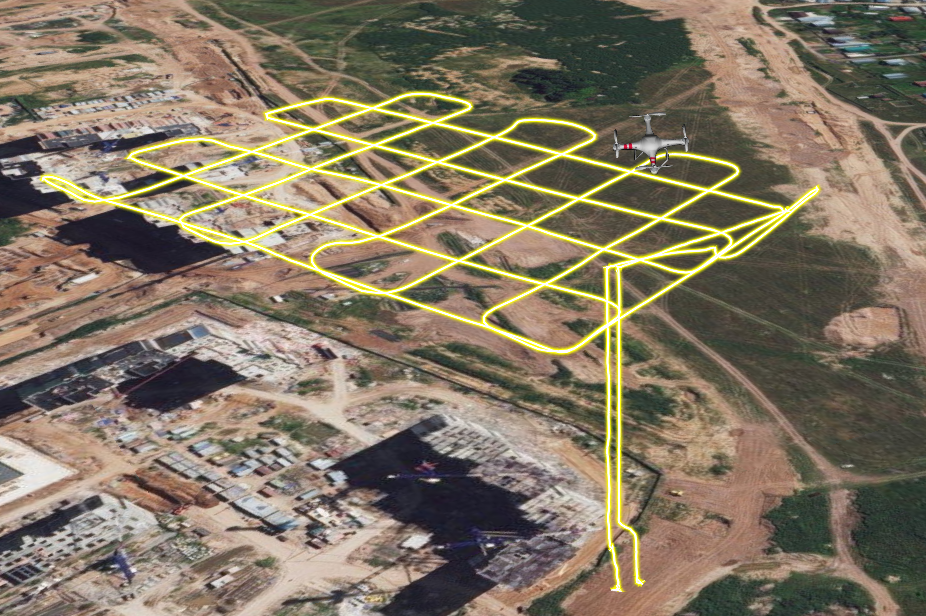
Вот пример - половину маршрута за домом и сигнала не было.
можно смело делат миксы прошивок как и для про (жаль тока нет прошивки без nfz)
Чуть чуть подождите. Уже есть dji go mod с патчем отключающим NFZ без модификации прошивки. Хотя кое какие манипуляции делать нужно: прошивка остается оригинальное, у нее обнулсяется база nzf, а dji go mod просто не спрашивает и не обновляет эту базу.
По поводу waypoint миссий на спарке…
Есть где почитать что и как с первого раза в лоб не решилась(
Андройд 4.4
Sony Xperia z3 tablet compact
Это неправильно… В корне. В случает неадекватной ситуации дрон не вернётся. Не приложение решает вернуть дрон или нет (ведь связи нет). Дрон при потере связи с пультом САМ через 20 секунд решает лететь в точку взлета. Протестируйте ещё раз. Начните миссию и выключите пульт - должен вернутся, в другое не верю. Это железная фича, не программная. Скорее всего была потеря видеолиньк, а пульт был подключен - светодиод зелёный.
К вопросу об откате прошивок. Когда дрон готово к взлёту, то будет вылазь предупреждение о старой версии или это только в начале бывает, т.е. при подключении?
Когда дрон готов к взлету красным будет рекомендовать обновить в верхней строке.
А в полёте будет мозг выносить?
Нет
Это неправильно… В корне. В случает неадекватной ситуации дрон не вернётся. Не приложение решает вернуть дрон или нет (ведь связи нет). Дрон при потере связи с пультом САМ через 20 секунд решает лететь в точку взлета. Протестируйте ещё раз. Начните миссию и выключите пульт - должен вернутся, в другое не верю. Это железная фича, не программная. Скорее всего была потеря видеолиньк, а пульт был подключен - светодиод зелёный.
Вот именно дрон решает. У него есть миссия, он ее выполняет. Вы сами то пробовали миссии? Даже надпись появляется что в случае потери связи, дрон продолжит миссию.
Повторюсь: waypoint миссия загружается в дрон, а не подаются сигналы с пульта во время полета.
Вы сами не пробовали летать по миссиям? А я делаю это часто, в том числе это нужно было делать при тестировании при написании моей программы. Как будут лишние свободные руки, запишу видео как даю команду на старт миссии, выключаю пульт и дрон спокойно отрабатывает миссию.
Какая неадекватная ситуация может произойти? Сбой GPS или компаса? Тогда какая разница, будет он продолжать миссию или полетит домой, если все равно он не сможет нормально полететь.
Есть где почитать что и как с первого раза в лоб не решилась(
Андройд 4.4
Sony Xperia z3 tablet compact
А что конкретно не получается?
Создаете миссии в моей программе. Там все просто, особых проблем возникнуть не должно. Можете спокойно создавать, редактировать или удалять.
Далее взлетаете, открываете waypoint mission, сохраненные миссии и нажимаете на нужную из списка. Справа сверху значек шестеренки, это настройка. Все, стартуем миссию. Можем выбрать скорость (до 10 м/с, но ребята которые делают dji go mod, в скором времени обещали поднять до 15).
Простите за вопрос от чайника…
Взлетаете на какой программе? Это зелёный мод, красный или ещё какой? Или официал?
Простите за вопрос от чайника…
Взлетаете на какой программе? Это зелёный мод, красный или ещё какой? Или официал?
Летаете потом в DJI GO mod. Красный, за остальные ручаться не могу, так как это непонятного происхождения сборки, и неизвестно, включили ли туда нужные патчи.
Я не ругаю программу. Я думаю, что правильно прекращать миссию при потере связи. Батарея сядет, связи нет, домой не возвращается, продолжает миссию до упаду. Сдуру человек может нарисовать миссию на 2 км пути - не в спорт режиме он ее не выполнит. Конец миссии НЕОЖИДАННО может быть в точке, где нет связи, человек указал дрону “зависнуть” в конце - что тогда? Ну по ошибке… Бегать потом искать точку, где связь есть?
у меня есть ещё Parrot Bebop, где подобные миссии заложены изначально в официальной программе. Кстати, мне там нравится, как они реализованы. Там при создании миссии просчитывается сколько времени она займёт и какой % аккумулятора остаётся. Я понимаю, что эти расчёты приблизительные, но меня ещё ни разу не подводили. Миссия выполняется до конца,даже при потере связи. Первый раз, когда при миссии потерял сигнал над морем и через пару минут дрон не вернулся, я по берегу побегал кипятком писая… Потом привык )))
Я не ругаю программу. Я думаю, что правильно прекращать миссию при потере связи. Батарея сядет, связи нет, домой не возвращается, продолжает миссию до упаду. Сдуру человек может нарисовать миссию на 2 км пути - не в спорт режиме он ее не выполнит. Конец миссии НЕОЖИДАННО может быть в точке, где нет связи, человек указал дрону “зависнуть” в конце - что тогда? Ну по ошибке… Бегать потом искать точку, где связь есть?
Сдуру можно … сами знаете что. Миссии для того и делаются чтобы независимо от связи отснять по программе. Иогда умышленно загоняя дрон за пределы радиосвязи. Это риск оператора.
В программах (всех которые я знаю) именно оператор выбирает действие при потере связи: вернуться, зависнуть или продолжить миссию.
Все ошибки на операторе, есличто. Кроме одной: при пропадании спутников в зоне отсутствия связи миссия прервется и не возобновится: на запуск миссии нужна команда с пульта. И домой дрон не вернется - миссия не закончена.
Красавчик MSC Orchestra
Длина: 293.8 метров Высота: 59.64 метра Водоизмещение: 92409 тонн К-во пассажиров: 2550 К-во экипажа: 1054 13 палуб, 1275 кают
Смысл в том, что при пропадании спутников, видя изображение можно погонять его выше/ниже. Пока одумается, если не жёсткий улёт конечно. А так… Миссия невыполнима - пропал и всё. Не… Я как-то очкую:)