Создание собственной системы стабилизации

на нижнюю или верхнюю плату?
подальше от солнца - лучше нижняя
О какая штучка появилась goodluckbuy.com/stm32f407-417zg-module-hy-stm32f4x…
Вобщем, если кто-то захочет поучавствовать в созидании новой платы, прошу вносить предложения пока я не начал разводку (нижняя почти готова)
на нижней плате будут распологаться: STM32F407VET6, MPU6000(SPI), MS5611(SPI), а так же, MicroSD(SPI), W25X40A (SPI), AT24C512BN (I2C), разъёмы.
На верхней: MT3329 (UART), HMC5883 (I2C)
За одно переехать сюда github.com/SergDoc/Nev_MultirotorControl - думаю будет удоней, т.к. я не особо программер 😃
DCMI будет разведен?
А надо?
Не знаю, интересуюсь 😃
Я на сколько понимаю для камеры (если вы планируете использовать камеру) потребуется внешнее ОЗУ, а его я как-то не планировал… и так уже под завязку получается нижняя плата…
Я на сколько понимаю для камеры (если вы планируете использовать камеру) потребуется внешнее ОЗУ, а его я как-то не планировал… и так уже под завязку получается нижняя плата…
Думаю вешать обработку или предобработку для передачи на единственный проц полётного контроллера бессмысленно, сильно разные задачи. Писать ПО для такой системы без поддержки ОСРВ крайне неудобно, а с осью возрастут накладные расходы на обработку задач, для многоротора может быть критично.
А платка хороша… Только опять же для полётного контроллера внутренненго ОЗУ достаточно.
Та с гудлака? там флешка внешняя…
а камеру маленькую (вертикально) для удержания позиции - интересно, но не сейчас… не по возрасту предмет 😃
О какая штучка появилась goodluckbuy.com/stm32f407-417zg-module-hy-stm32f4x…
Так есть там же платы уже с датчиками и STM, чем не устраивает?
goodluckbuy.com/kcopter-stm32f103cbt6-flight-contr…
Или более продвинутый вариант: PX4 Autopilot
store.diydrones.com/PX4FMU_p/br-pxfmu.htm
на первой это аналог NAZE32, вторая 149 у.е. у меня на данный момент примерно тоже самое по цене только с GPS и сонаром (из расчёта перехода на ms5611, и заказа плат)
Та с гудлака? там флешка внешняя…
С гудлака, я думал там внешняя ОЗУха.
Или более продвинутый вариант: PX4 Autopilot store.diydrones.com/PX4FMU_p/br-pxfmu.htm
Блин! Вот, что доктор прописал! Где ж вы раньше то были, я уже пачку датчиков заказал для самостоятельной сборки! Взял бы это…
Может киты у китайцов появятся в виде плат? Может сограждане повторят плату? Самому на такое не сваять…
Сергей (SergDoc) обрати внимание! Критичные датчики по СПИ.
Чёт о нём не очень лестно отзывались на этом форуме, поддержка 4 шимов выходных, ну или с платой расширения для самолётов, а что за датчики взяли?
Чёт о нём не очень лестно отзывались на этом форуме
Это где, в какой теме?
поддержка 4 шимов выходных
это можно покопать, ещё пару нарыть
а что за датчики взяли?
МПУ6050, ХМЦ5883, МС5611
6050 -только i2c
блин, ну вот … повёлся на низкую цену, не разобрался …
О какая штучка появилась www.goodluckbuy.com/stm32f407...ent-board.html
жутко дорого и не актуально по сравнению с этим.
жутко дорого и не актуально по сравнению с этим.
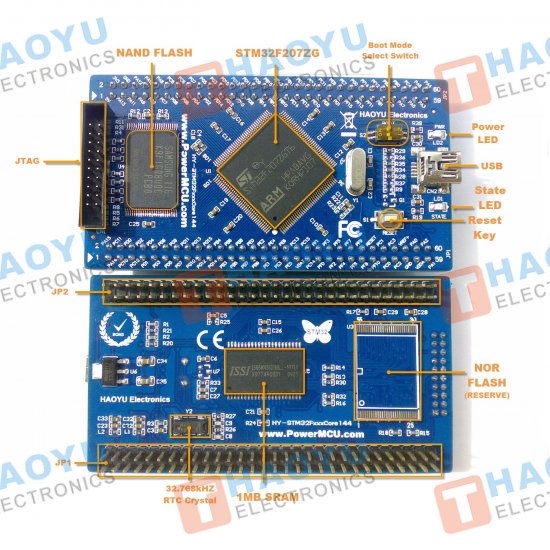
Там на борту еще внешнее ОЗУ и 1-2 микросхемы разных типов ПЗУ. У меня 2хх их же, плата не менялась естественно
Впрочем, на ебее и за 50 от производителя можно взять с бесплатной доставкой
блин, ну вот … повёлся на низкую цену, не разобрался …
я же писал раньше почему я его не хочу 😦
я же писал раньше почему я его не хочу
Ну дык… Я ж говорю “В зобу дыханье спёрло…” (с) Крылов
Ну ничего, покурю схему ПХ4ФМУ, если понравиться буду закзывать. Побыстрому прошивку адаптирую, а дальше посмотрим что улучшить.
Кстати, дидроны в Россию шлют? дорого?
Там на борту еще внешнее ОЗУ и 2 микросхемы разных типов ПЗУ
тогда да, актуально. но все равно платки от wvshare круче 😉