Walkera QR-X350 Pro

380 чуть побольше, может, туда пропы 10-ки встанут и моторы помощнее…
Да аккумулятор у вас сдох просто, и все. Валькин родной быстро умирает, не отдает он ток нужный, вот и пухнет. Аналогично плохо работают всякие аналоги. Лучше всех у меня показал себя мультистар, но он тоже вспух уже. Идеальный вариант - зиппики 2200, о них тут на каждой странице уже )) С ними квадрик даже с подвесом летает как ужаленный! Да, чуть меньше, но 15 минут-то будет спокойной съемки, а 30 никто на вальке с подвесом и не обещал.
А если свой собирать - есть замечательные рамы складные, вам этот вариант должен подойти.
У меня аналогичные мысли ходят - Валя что-то умом повредилась,… есть мысля посмотреть на аналогичные платформы, тем паче что оно куда дешевле почему-то. 380 помощнее будет? Или шило на мыло?
Ну, Валька, конечно, доработки требует. И вообще она не без странностей… Но я думаю об измене не потому, что Валька плоха, скорее наоборот. Довёл её до ума. И моторы мощные, и регули не самые плохие… Но уперся в возможности базы и ардукоптера. На самом деле Вальку можно рассматривать как основу. Купив единожды её целиком, дальше уже можно менять комплектующие как угодно. Не нужны эти дорогие валкеровские моторы. Я летал и с Gartt 2212 и Tarot 2214 - всё гораздо дешевле, а с Gartt мощности до дури.
Есть два момента, которые меня огорчают. Во первых, - всё таки маленькая база… Нет, всё в нее умещается, конечно, но X350 - это “предельный предел” даже для любительской видеосъемки начального уровня. Отсюда и труднопобедимая вибрация. И практически неразрешимый компромисс с ПИД между устойчивостью, управляемостью и плавностью.
Второй момент, - это исчерпанность ардукоптера. Он просто не может летать лучше. Уже потому, что память под завязку, и никаких новых революционных алгоритмов ждать не стоит (а сам я просто юзер, а не разработчик)). Хотя летает вполне себе ничего, но вот проприетарные алгоритмы работают почему-то лучше. Не знаю в чём именно лучше, просто так чувствую.
Говоря короче, моя Валька - совершенство))) (насколько это возможно в рамках, данных ей природой), но хочется повозиться с чем-то, что имеет больший потенциал. Как-то так…
но все самопальные квадры сложны в перевозке, а для меня это критично. Ищу золотую серединку.
Ставьте мощные моторы и проблема будет решена. Только обязательно балансировать их (натфилечком))) и гайки-колпаки балансировать, а потом уже балансировать всю систему мотор-пропеллер-гайка. Эмпирическим путем установлено, что отказ от текстолитовой прокладки под двигателем
заметно снижает вибрацию. Не знаю, почему так. Допускаю, что это какое-то недоразумение, но у меня это сработало.
Да аккумулятор у вас сдох просто, и все
Не, у меня их вагон, и родные и не-родные, и от Фантика ставил; и на другой Вале свои пробовал - дело не в батарейках.
есть замечательные рамы складные
Про складные тоже думал, но они не переживут моего стиля полётов “а давайте проверим вон ту ёлку”. Валя на удивление ремонтопригодна, а вот со складными, боюсь, так не выйдет. Потому так долго и ищу раму для перехода, уже полгода почти.
Есть два момента, которые меня огорчают. Во первых, - всё таки маленькая база…
На 380, думаете, лучше будет? Я вот тоже надеюсь на это, потому и смотрю на него. Но ничего про его кишки не понял.
Я тоже про кишки не понял. Говорят хорошие. Но можно ли в них покопаться, - вопрос открыт)))
Хух, дочитал до 144 страницы тему. Сдох. Завтра постараюсь осилить все до конца.
Понял следующее:
- Сток ресивер - говно
- Сток аппа - говно
- FlySky хорошо, бюджетно. FrSky лучше, но дорого
Пока остановился на FrSky, но первый вопрос:
Если
D8R-XP - хорошо, соединяем по CPPM радуемся и X8R + SBUS-CPPM декодер тоже все хорошо, то просто X8R может быть хорошо? Если да, то почему никак могу нагуглить нормальный мануал с картинками какие провода нужны, какие пины соединять?
ЗЫ: Да, вопросы тупые, т.к. на руках ничего нет, все едет.
Второй момент, - это исчерпанность ардукоптера.
В корне неверная мысль!!! При чем тут ардукоптер??? Это мозг DEVO-M косячный. Я его сменил и все-Вальку не узнать)
Это мозг DEVO-M косячный. Я его сменил и все-Вальку не узнать)
Что поставили?
- Пока остановился на FrSky,
- D8R-XP - хорошо, соединяем по CPPM радуемся
- Очень правильно!
- А чего вы так проводов-то боитесь? Их всего-то нужно три (трёхжильных сервопровода).
Я принципиально не стал соединять по data bus. Может я не прав, конечно, но интуитивно чувствую, что если избавить ПК от декодировки CPPM, то снизится шанс включения недокументированного полётного режима RTC (return to China). Приемник D8R-II plus
Да, чуть меньше, но 15 минут-то будет спокойной съемки,
Артём! А Вы до какого напряжения летаете на штатных аккумуляторах? Я до 10.6…10.5 и “Валька! Домооой!” Более 12 минут никогда не летал с подвесом, стрёмно.
А чего вы так проводов-то боитесь? Их всего-то нужно три (трёхжильных сервопровода).
Я их не боюсь 😃 Я просто не знаю сколько каких проводов надо и какие пины, а гугление такие подробности почему-то не дает, ну или ищу плохо. Вполне вероятно, когда получу свой БезНиФига(BNF) и увижу все живьем - эти вопросы отпадут, но тогда потеряю время, может сразу куплю пусть лежат. Когда приедет - сразу собирать буду.
когда получу свой БезНиФига(BNF)
Класс!))
Всё будет нормально. Здесь всегда помогут. А каналы можно подключать методом тыка, предварительно подключив Вальку к Миссион планер на вкладку калибровки радио, например, вкладку полётных режимов… Сразу видно, какой стик или переключатель чем управляет.
Всё будет нормально. Здесь всегда помогут.
Знаете, когда я дочитал эту тему примерно до 70-80 страницы у меня было жгучее желание при получении его сразу продать и не морочить голову ни себе ни людям. Но ближе к 120-й почему то появилось ощущение, что все таки разберусь 😃
Что поставили?
Поставил F4BY-совсем другое дело. Никаких доп настроек не делал-все в стоке. летает отлично. До кучи заменил и GPS ,поставил от Алексея Козина 5 версия.
F4BY-совсем другое дело
Евгений, у нас еще один повод пересечься! Об F4BY пока только читал + немного слышал. Вот бы увидить живьем его в полете.
Может я не прав, конечно
RTC - режим на вальках кто-нибудь испытывал разве? У нас зависал приемник 703a, тогда он просто улетал в ту сторону, на которой завис (а иногда просто останавливался в воздухе). Бояться CPPM не нужно, он точно ничем не повредит вам.
Артём! А Вы до какого напряжения летаете на штатных аккумуляторах?
Я на любых до 10.5 летаю. У меня около 15 минут выходило, но не гонок, а спокойной съемки. Если корабкаться на верхатуру “газ в пол” или летать по полю шмелем, то естественно ни о каких 15 минутах даже речи не идет.
Вот бы увидить живьем его в полете.
Ну только в выходные. В субботу до 14.00 работаю. Но могу на работу захватить. В воскресенье-по ходу будет нелетная погода((((
Мне больше всего в “дрифте” нравится летать.
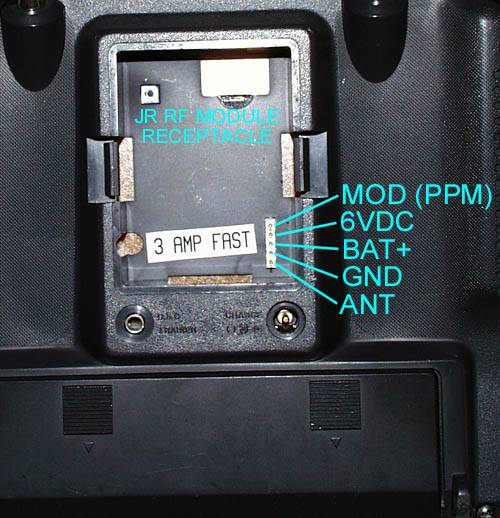
Если да, то почему никак могу нагуглить нормальный мануал с картинками какие провода нужны, какие пины соединять?
Вот, пожалуйста, веселые картинки на RCGROUPS. Не знаю как у вас с английским, но и без чтения все будет понятно как подключать.
D8R-XP - хорошо, соединяем по CPPM радуемся и X8R + SBUS-CPPM декодер тоже все хорошо, то просто X8R может быть хорошо?
Нужно понимать, что CPPM и SBUS — это разные протоколы. Упрощенно, используются для передачи по одному проводу управляющих каналов в контроллер. Отличаются форматом сигнала и скоростью передачи информации. SBUS с Devo-M работать не будет, а лишний декодер только снизит надежность канала управления, посему остановитесь на CPPM и не парьтесь. А вот сейчас на гоночных миниках, например, SBUS в тренде, так как он быстрее и позволяет выиграть доли секунды на соревнованиях. На медленном утюге типа прошки вы этого не заметите.
Не знаю как у вас с английским, но и без чтения все будет понятно как подключать.
С англ вроде норм, поэтому я там и прочитал, что у него описана установка D8R-XP, поэтому он шибко и не парился, замкнул пины 3 и 4, на 1м - получил CPPM.
А про X8R он пишет
The newer X8R receiver outputs S-bus which is not recognized by the Devo-M and so must have individual servo lead connections for each channel
Вот я и допытывался какие и сколько servo lead connections нужно.
посему остановитесь на CPPM и не парьтесь
Снова не понял. Как я на ней остановлюсь, если, скажем приобрету X8R. Или вы имеете ввиду, искать и покупать именно D8R-XP ?
X8R очень неудобный приемник для прошки. Во-первых, в нем нет CPPM, а только SBUS. Но можно подключить кучей проводов. Во-вторых, у него антенны с толстыми диполями, которые через штатные отверстия в корпусе невозможно просунуть. И зачем вам этот геморрой?
Сколько servo lead? Да кучу берите. Пригодятся. Только лучше силиконовые и не дубовые.
X8R очень неудобный приемник для прошки.
Значит из FrSKY лучше D8R-XP ? Или, еще лучше, как в районе 160 страницы рекомендовал NARAJANA - вот такое комбо hobbyking.com/…/__14355__FrSky_DF_2_4Ghz_Combo_Pac… ?
D8R-XP оптимальный и проверенный вариант. Можно и комбо, если D8R-II перешить в XP, например так.
D8R-XP оптимальный и проверенный вариант. Можно и комбо, если D8R-II перешить в XP, например так.
А теперь очень глупый вопрос. Выше ссылка на комбо с D8R-II, а вот просто ресивер
hobbyking.com/…/__14356__FrSky_D8R_II_PLUS_2_4Ghz_…
В чем отличие? Для каких целей используется комбо, какие преимущества?
Ну Семен Семеныч! В комбо приемник и передатчик с разъемом продаются вместе дешевле. В зависимости от того какой у вас внешний модуль (JF или FT) поддерживает аппа, такой передающий модуль в комбо надо и брать. На FlySKY вроде JR и есть. Надоела вам фриска — вытащили внешний модуль и перешли на Orange DSM, но такие рецидивы мне не знакомы 😃.
На картинке тот самый MOD=CPPM только передающий cигнал из аппы в модуль связи.
Понятно. Чего то уже и жаба начинает душить на аппу FrSky… может чего проще взять…