Walkera QR-X350 Pro

Ребят а в чём отличие точки HOME от точки RTL?
в общем поехал на своем полигоне протестирую все, я уже падал, мне не страшно
да нет конечно, но RTL удержание, стабилизе и auto mode я думал все используют и кто как куда ставить какие настройки…что бы не было крешей, судя по wiki вообще все должно падать, но тем не менее все то как то летают, как? без RTL ? или как? или в место IOC ставят auto ? как тогда сделать что бы он продолжал миссию при потере сигнала? че то я вообще запутался уже (
Чтобы продолжал миссию нужно в FL mode 6 поставить Auto, НО! В этом случае, если Вы захотите просто полетать без миссии, нужно перед полётом не забыть очистить старую миссию из коптера и создать миссию состоящую из одной точки RTL и загрузить её в коптер. Хотя впринципе, раз всё равно подключаться к МП, то можно просто менять FL mode 6 обратно на RTL. А когда опять нужна будет миссия менять его на Auto. И ещё вариант решения этой проблемы: Увеличить радиус действия аппаратуры до того на который коптер улетит в миссии:) Тогда можно Auto ставить на любой другой FL mode. Связь теряться не будет и миссия будет выполнятся.
так в вики же написано если в FL mode 6 стоит AUTO, то при потере сигнала происходит креш в любом случае, не? или только креш будет в свободном полете?
а что убдет если батарея разрядится когда стоит в FL mode 6 режим AUTO ? тоже самое? креш? ну в смысле он полетит на старое место HOME
и будет ли работать если режим AUTO включить в место IOC , а что бы не улетал в RTL при миссии, поставить FS_THR_ENABLE =2
в общем поехал на своем полигоне протестирую все, я уже падал, мне не страшно
Друг, очень жду от тебя отчета, как все прошло/какие настройки делал.
так в вики же написано если в FL mode 6 стоит AUTO, то при потере сигнала происходит креш в любом случае, не? или только креш будет в свободном полете?
а что убдет если батарея разрядится когда стоит в FL mode 6 режим AUTO ? тоже самое? креш? ну в смысле он полетит на старое место HOME
и будет ли работать если режим AUTO включить в место IOC , а что бы не улетал в RTL при миссии, поставить FS_THR_ENABLE =2
Думаю в вики просто перестраховываются на тот случай если пользователь забыл потереть миссию. Тогда да в свободном полёте коптер полетит выполнять миссию которую в нём оставили и скорее всего куда нибудь врежется или сядет батарея и он приземлиться в реку или в едущий автомобиль… По поводу батареи вопрос интересный, я поставил у себя при разряде выполнять Land, поэтому думаю ему не важно что в FL mode 6, хотя это я только предполагаю. Но если по рязряду стоит RTL, то скорее всего включиться режим Auto.
Щас попробовал на FMOD switch 3 поставил Auto. В миссион планере включаю режим Auto. Отображает что коптер в режиме Auto. Но когда выключил аппу, режим сменился на RTL, хотя FS_THR_ENABLE установлен в 2. Непонятно.
Это как, вместо модема?
Все напутал, вместо компа подключил телефон на андроиде с дроид планер.
в общем что то я намудрил, у меня не включается режим AUTO, хотел его на FMOD поставить, подскажите мои манипуляции что нужно сделать я просто Ch7 Opt поставил Auto, не верно ? что то у меня Ch7 Opt этот вообще перестал работать даже когда я вернул его в Simple…подскажите как вы делали?
выключил аппу, режим сменился на RTL, хотя FS_THR_ENABLE установлен в 2. Непонятно.
FS_THR_ENABLE - это при газе в 0, а не при потере сигнала.
В миссион планере включаю режим Auto.
В МП нужно вместо RTL поставить Auto, тогда при выключении аппы или потере сигнала будет продолжаться миссия. Вы к Владиславу в дневник заглядывали? Там подробно расписано что и как.
>В МП нужно вместо RTL поставить Auto, тогда при выключении аппы или потере сигнала будет продолжаться миссия. Вы к Владиславу в дневник заглядывали? Там подробно расписано что и как.
вы меня не поняли, я не хочу так делать, я хочу что бы Auto не заменял RTL, я хочу поставить AUTO в место IOC
p.S> я уже настраивал две недели компас как вы делаете, спасибо…хочу пойти по самостоятельному пути
сегодня подключал свой SJ4000, красота!
В МП нужно вместо RTL поставить Auto, тогда при выключении аппы или потере сигнала будет продолжаться миссия. Вы к Владиславу в дневник заглядывали? Там подробно расписано что и как.
Просто вы не прочитали нашу дискуссию:) мы там разные варианты обсуждаем.
Щас в обеденный перерыв решил немного полетать, странно себя повёл коптер, в режиме стабилайз, коптер стало уносить в сторону, причём ветра нет вобще! В Wiki Написано: Stabilize Mode - выравнивание по акселерометрам в горизонт. Обычный режим полёта. То есть в этом режиме компас не задействован и проблема в калибровке акселерометра?? странно…
я хочу что бы Auto не заменял RTL
Тогда меняйте аппу с приемником и вперед. На RX703 при потере сигнала ВСЕГДА будет RTL (либо продолжение миссии, если поставить вместо RTL AUTO).
я уже настраивал две недели компас как вы делаете, спасибо…хочу пойти по самостоятельному пути
А как я компас настраиваю? 😃
мы там разные варианты обсуждаем
Вариантов два (см.выше).
Щас в обеденный перерыв решил немного полетать, странно себя повёл коптер, в режиме стабилайз, коптер стало уносить в сторону, причём ветра нет вобще! В Wiki Написано: Stabilize Mode - выравнивание по акселерометрам в горизонт. Обычный режим полёта. То есть в этом режиме компас не задействован и проблема в калибровке акселерометра?? странно…
компас задействуется все равно, я две недели так летать не мог…
>Тогда меняйте аппу с приемником и вперед. На RX703 при потере сигнала ВСЕГДА будет RTL (либо продолжение миссии, если поставить вместо RTL AUTO).
вы всеравно меня не понимаете, можно же не отключать RTL вообще, пусть он возвращается когда миссия выполняется когда потеряется сигнал, я же не против, мне надо просто что бы работал RTL и AUTO одновременно, для этого надо AUTO поменять местами с IOC, если я правильно поинмаю, вот это у меян и не получается, у меня теперь не IOC ни AUTO не работает, я пока не разбирался…
P.S. красота, блин надо разбираться с миссиями ))
мне надо просто что бы работал RTL и AUTO одновременно
Ну так и не ставьте в МП вместо RTL AUTO и всё. Щелкнули тумблером и коптер полетел по миссии, а если пропала связь, коптер прервет миссию и вернется домой.
P.S. По настройке AUTO на седьмой канал… Вот вы ленивый. Говорю же посмотрите у Владислава в дневнике:
нужно нам перенастроить тумблер IOC на седьмом канале (этой функцией пожертвуем) на Avto Mode. После переназначения тумблера, нажимаем Write Params для сохранения изменений.
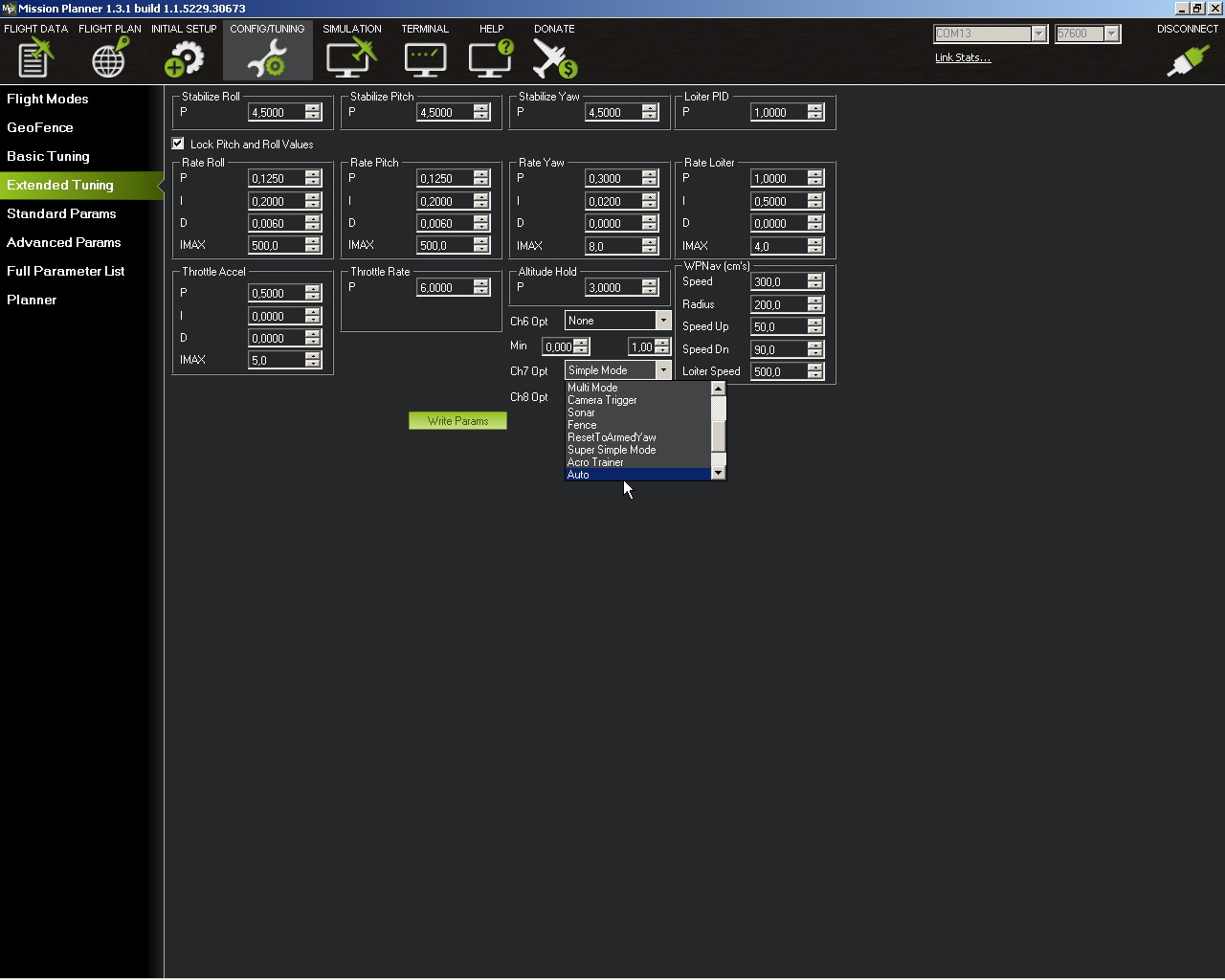
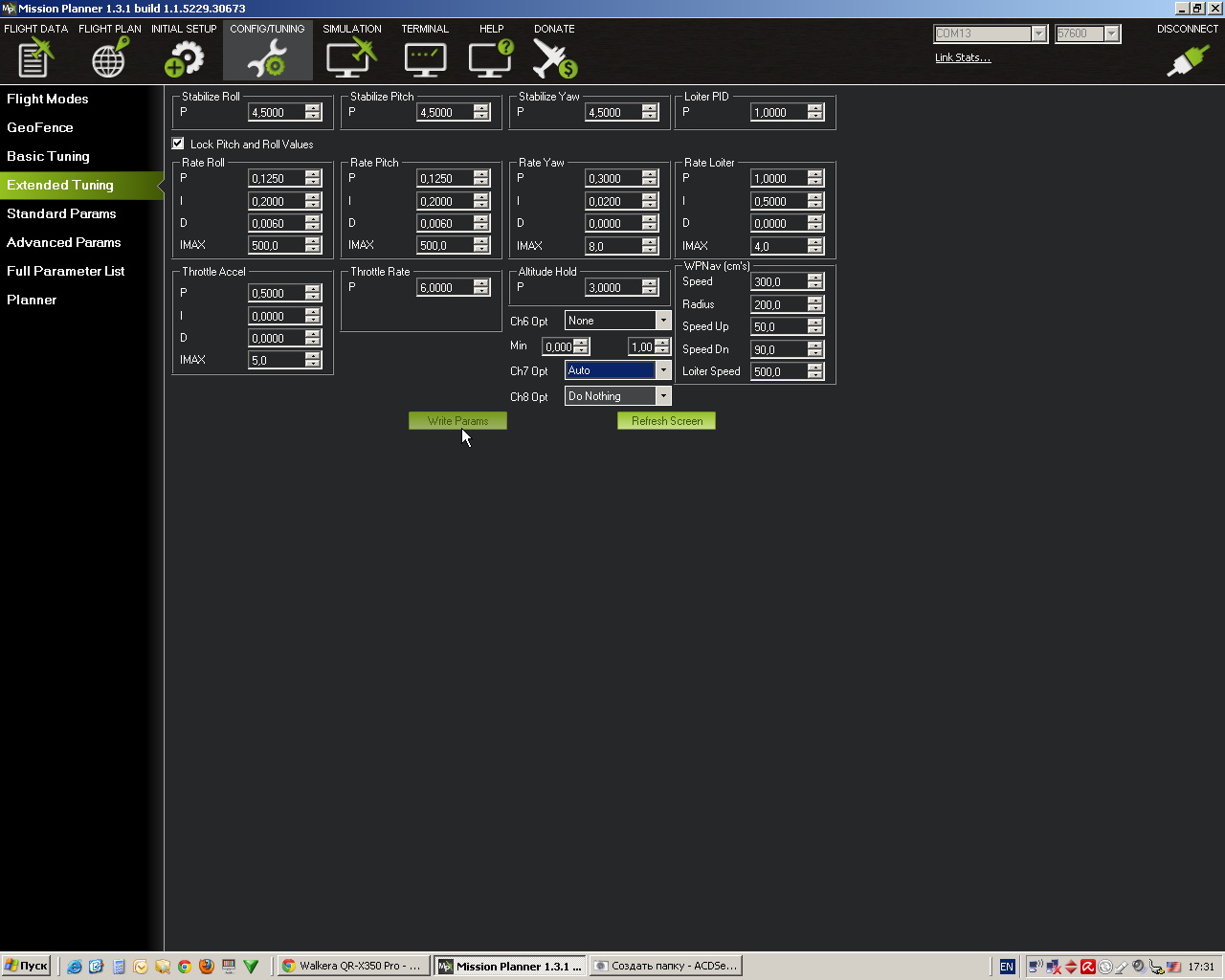
так и делал, что то он меня там спросил про дубликацию, и я записал, теперь тумблер не работает, надо разбираться, я думал что может что то еще надо было делать, но походу нет, бекап есть если что настроек восстановлю, спасибо за разъяснения.

Скажите, пожалуйста я правильно понимаю, что разъем на 3DR радио-модеме - CTS(INPUT) - надо подключить к Tx на плате DEVO-M, а RTS(output) к Rx на плате DEVO-M?
Спасибо
так и делал, что то он меня там спросил про дубликацию, и я записал, теперь тумблер не работает, надо разбираться, я думал что может что то еще надо было делать, но походу нет, бекап есть если что настроек восстановлю, спасибо за разъяснения.
Зайди в Radio Calibration и пощёлкай тумблером, седьмой канал меняет значения pwm?
все я разобрался…в место IOC у меня были в настройках devo f7 указано на 7 канале тумблер GEAR для включения отключения записи камеры
а можно FMOD повесить переключение двух режимов? там же две позиции , я не совсем понимаю как это работает
Я так и не понял как на FMOD ещё два режима вешать…
Вопрос к тем, кто перешел на APM. У меня теперь требуется гораздо больше газа для взлета (раньше взлетал на 55 по пульту, теперь по 80). В какую сторону смотреть? Контроллера или пульта? Что за параметр на это влияет? (да, я не держал в рукам ничего, кроме уг-коптера за копейки).
Для человека, кто написал в личку (не могу ответить, наверно, надо 30 дней с начала реги ждать).
img-fotki.yandex.ru/get/…/0_87bb4_c94ebe7d_orig
img-fotki.yandex.ru/get/…/0_87bb6_3ea92a1c_orig
Питание камеры и подвеса с правого нижнего угла, где 4 пары площадок.
img-fotki.yandex.ru/get/…/0_87bb7_c1d78635_orig
Скажите, я настроил f7 по инструкции
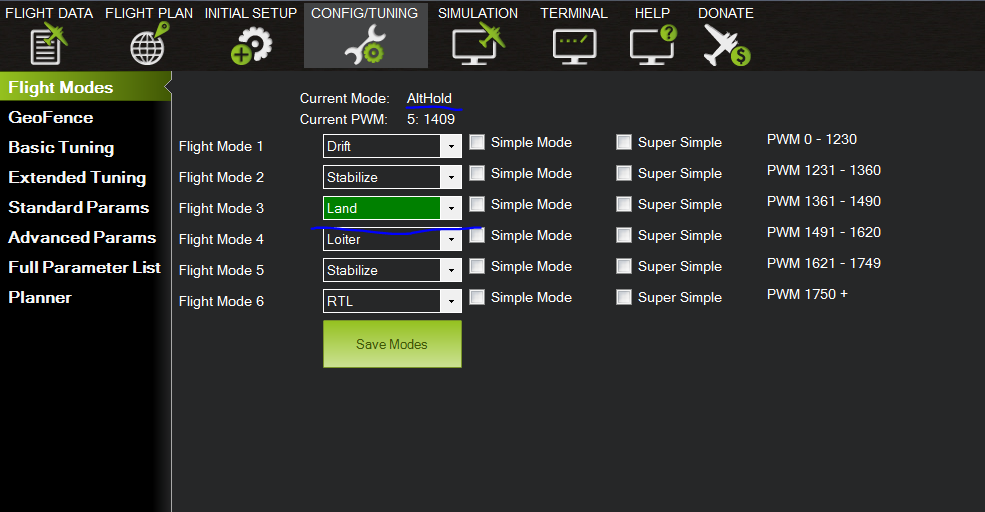
MIX0:FMODE0 (GEAR=-102) — режим 1 Stabilize Mode
MIX0:FMODE1 (GEAR=-58) — режим 2 (Настраивается по желанию в Mission Planner, например Altitude Hold. То же, что и stab, но с удержанием высоты по барометру. Замечательная вещь! Не зависит от GPS. Дрейфует только по горизонту. Управление поджато только по высоте).
MIX0:FMODE2 (GEAR=-25) — режим 3 (Настраивается по желанию в Mission Planner, например Drift Mode).
MIX1:FMODE(любое положение) (GEAR=8) — режим 4 Loiter Mode
MIX2:FMODE(любое положение) (GEAR=108) — режим 6 RTL Mode
однако у меня в первом случае gear равен -58 а во втором -102, хотя делал все по инструкции. и второе, что бы я не поставил на FMODE2 - всегда выбирается режим AltHold, хотя сохранен другой режим ( все через mission planner)