Walkera QR-X350 Pro

мне надо просто что бы работал RTL и AUTO одновременно
Ну так и не ставьте в МП вместо RTL AUTO и всё. Щелкнули тумблером и коптер полетел по миссии, а если пропала связь, коптер прервет миссию и вернется домой.
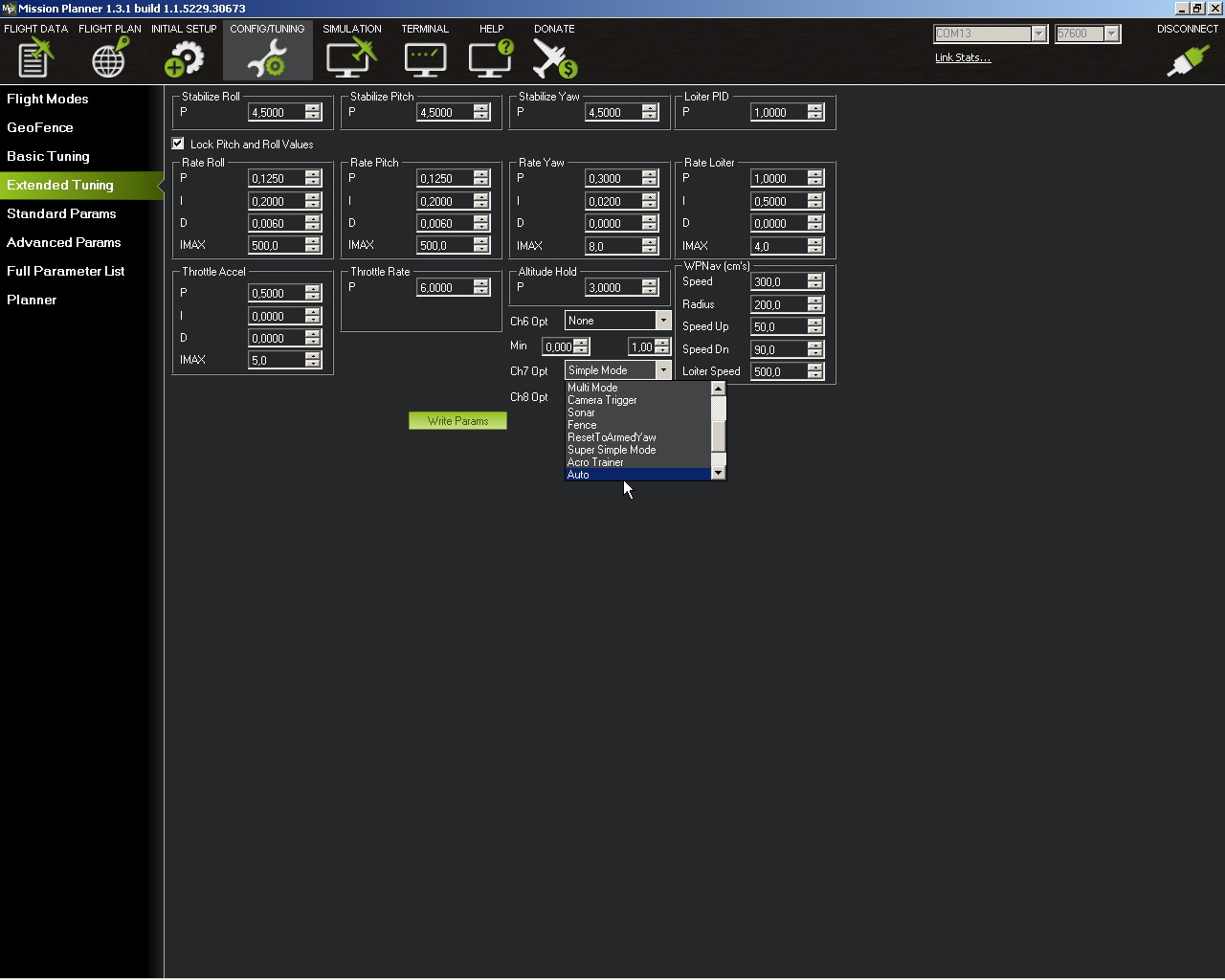
P.S. По настройке AUTO на седьмой канал… Вот вы ленивый. Говорю же посмотрите у Владислава в дневнике:
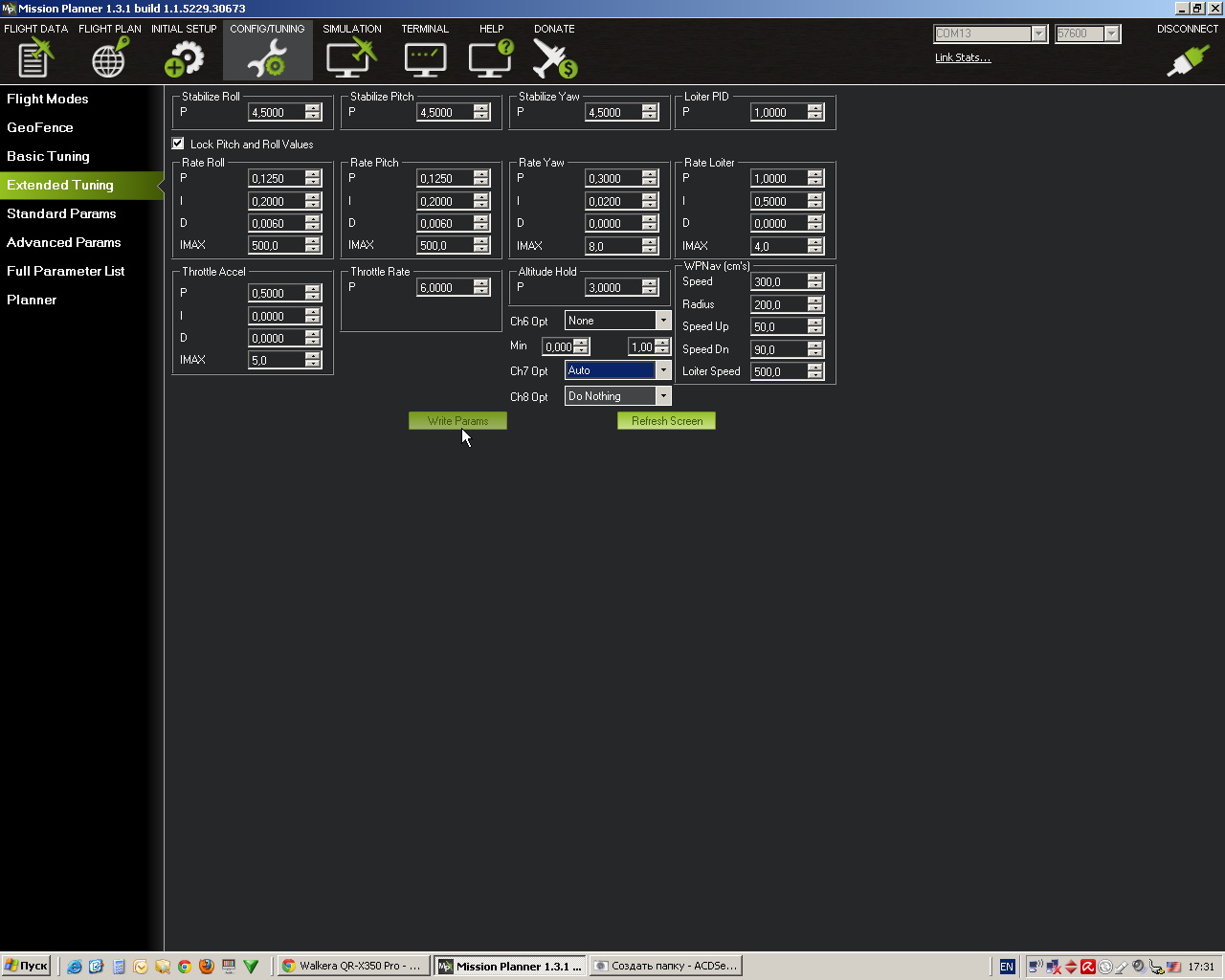
нужно нам перенастроить тумблер IOC на седьмом канале (этой функцией пожертвуем) на Avto Mode. После переназначения тумблера, нажимаем Write Params для сохранения изменений.
так и делал, что то он меня там спросил про дубликацию, и я записал, теперь тумблер не работает, надо разбираться, я думал что может что то еще надо было делать, но походу нет, бекап есть если что настроек восстановлю, спасибо за разъяснения.

Скажите, пожалуйста я правильно понимаю, что разъем на 3DR радио-модеме - CTS(INPUT) - надо подключить к Tx на плате DEVO-M, а RTS(output) к Rx на плате DEVO-M?
Спасибо
так и делал, что то он меня там спросил про дубликацию, и я записал, теперь тумблер не работает, надо разбираться, я думал что может что то еще надо было делать, но походу нет, бекап есть если что настроек восстановлю, спасибо за разъяснения.
Зайди в Radio Calibration и пощёлкай тумблером, седьмой канал меняет значения pwm?
все я разобрался…в место IOC у меня были в настройках devo f7 указано на 7 канале тумблер GEAR для включения отключения записи камеры
а можно FMOD повесить переключение двух режимов? там же две позиции , я не совсем понимаю как это работает
Я так и не понял как на FMOD ещё два режима вешать…
Вопрос к тем, кто перешел на APM. У меня теперь требуется гораздо больше газа для взлета (раньше взлетал на 55 по пульту, теперь по 80). В какую сторону смотреть? Контроллера или пульта? Что за параметр на это влияет? (да, я не держал в рукам ничего, кроме уг-коптера за копейки).
Для человека, кто написал в личку (не могу ответить, наверно, надо 30 дней с начала реги ждать).
img-fotki.yandex.ru/get/…/0_87bb4_c94ebe7d_orig
img-fotki.yandex.ru/get/…/0_87bb6_3ea92a1c_orig
Питание камеры и подвеса с правого нижнего угла, где 4 пары площадок.
img-fotki.yandex.ru/get/…/0_87bb7_c1d78635_orig
Скажите, я настроил f7 по инструкции
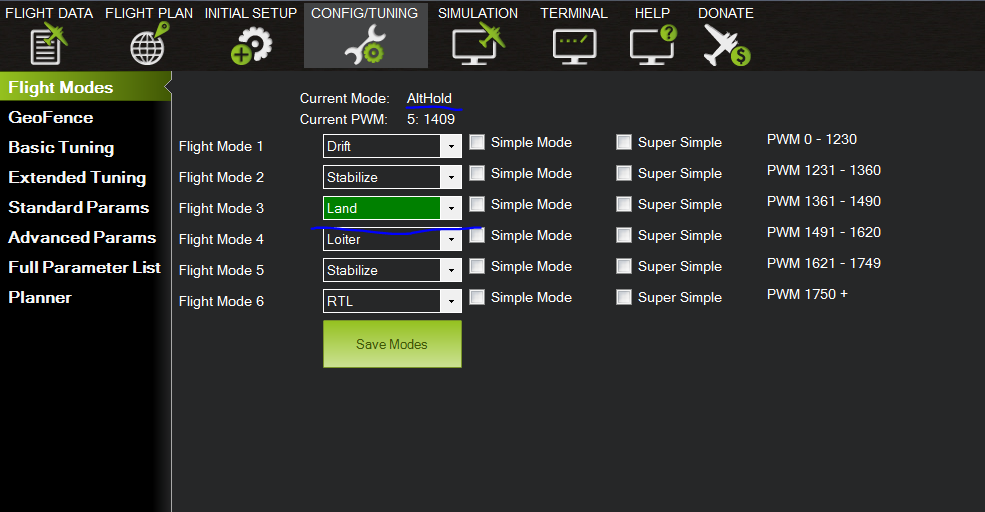
MIX0:FMODE0 (GEAR=-102) — режим 1 Stabilize Mode
MIX0:FMODE1 (GEAR=-58) — режим 2 (Настраивается по желанию в Mission Planner, например Altitude Hold. То же, что и stab, но с удержанием высоты по барометру. Замечательная вещь! Не зависит от GPS. Дрейфует только по горизонту. Управление поджато только по высоте).
MIX0:FMODE2 (GEAR=-25) — режим 3 (Настраивается по желанию в Mission Planner, например Drift Mode).
MIX1:FMODE(любое положение) (GEAR=8) — режим 4 Loiter Mode
MIX2:FMODE(любое положение) (GEAR=108) — режим 6 RTL Mode
однако у меня в первом случае gear равен -58 а во втором -102, хотя делал все по инструкции. и второе, что бы я не поставил на FMODE2 - всегда выбирается режим AltHold, хотя сохранен другой режим ( все через mission planner)
Вопрос к тем, кто перешел на APM. У меня теперь требуется гораздо больше газа для взлета (раньше взлетал на 55 по пульту, теперь по 80). В какую сторону смотреть? Контроллера или пульта? Что за параметр на это влияет? (да, я не держал в рукам ничего, кроме уг-коптера за копейки).
Читаем в библии:
translate.googleusercontent.com/translate_c?depth=…
Владислав, я Вам ответил.
Владислав, я Вам ответил.
Не все андроид планшеты и телефоны с OTG работают с 3dr модемами. Зависит от того, какие драйвера прошиты в ядре системы.
При наличии в планшете блютуз, есть изящное решение, подсоединение через мост блютуз- 3dr.
Не нужно проводов, модем можно разместить в более удобном для приема месте. У меня он установлен на мачте 4 метра высотой, простенькая самодельная антенна Яги на 433мгц позволяет поддерживать связь на расстоянии до 6км.
Всем привет!Walkera QR X350pro devo 10
столкнулся со следующей проблемой при тесте дома обнаружил что в режиме полета GPS двигатели запускаются при газе более 50% и потом выключаются на 28%, как это настроить?
p.s летал всего один раз в мануале
вот видео проблемы
Периодически в теме проскакивают вопросы про название разъемов в контроллере и датчиках на борту w350p. Вот картинка с объяснением отсюда.
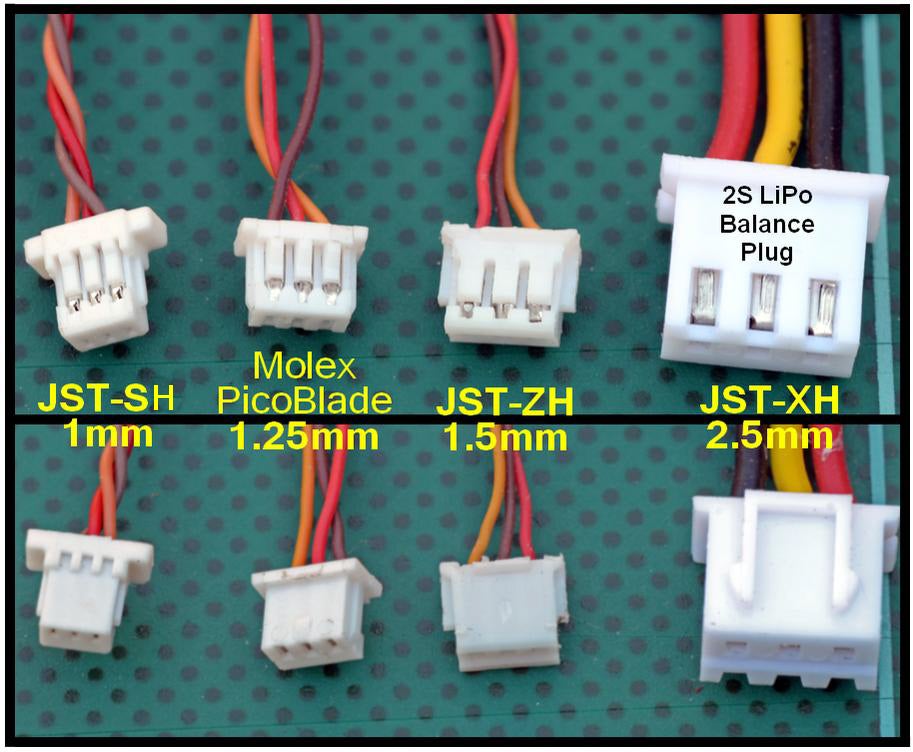
Как называются разъемы с защелками в самом контроллере devo-m так и не понятно. Решается покупкой готового зипа валкеры с разъемами на ебеях и в других магазинах.
двигатели запускаются при газе более 50% и потом выключаются на 28%
На 0:38 вы переключились в Loiter. Это автоматический режим удержания по компасу, акселерометру, альтиметру и GPS. Он подразумевает минимум 50% газа. Вот поэтому моторы и выключаются. А в самом начале все стартует правильно от ноля. Калибровки аппаратуры и режимов в МП посмотрите. Вначале калибруется аппа, потом каналы в Mission Planner. Стандартные разъемы питания лучше заменить на XT60.
Калибровки аппаратуры и режимов в МП посмотрите. Вначале калибруется аппа, потом каналы в Mission Planner.
где посмотреть примеры калибровки?
мой при подаче газа норовит, на левую сторону и чуть вперед, клюнуть подозреваю,что не откалиброван движок …
Калибровки аппаратуры и режимов в МП посмотрите. Вначале калибруется аппа, потом каналы в Mission Planner.
прочитал всю тему, но сленг для меня еще мало досягаем)))
если можно поподробнее про настройки
если можно поподробнее про настройки
- Введение в Ардукоптер. Но не все из этого букваря применимо для w350p: нет логов, нет программного файлсейва по тротлу, регули не калибруются, PosHold включается только с модема и пр…
- Вики Walkera QR X350 PRO.
- Вики Walkera QR X350 PRO. DEVO-M. Почти, но не совсем, ArduPilot.
Кнопочка спасибо справа.
Скажите, пожалуйста я правильно понимаю, что разъем на 3DR радио-модеме - CTS(INPUT) - надо подключить к Tx на плате DEVO-M, а RTS(output) к Rx на плате DEVO-M?
Спасибо
А на мой вопрос кто-то может ответить? Спасибо 😃
P.S. красота, блин надо разбираться с миссиями ))
В каком режиме это снято? В ручном? ФПВ есть?
нет логов, нет программного файлсейва по тротлу, регули не калибруются, PosHold включается только с модема и пр…
а, ну теперь все понятно)))
пошел читать
Скажите, пожалуйста я правильно понимаю, что разъем на 3DR радио-модеме - CTS(INPUT) - надо подключить к Tx на плате DEVO-M, а RTS(output) к Rx на плате DEVO-M? Спасибо
Именно так: TX на TX, а RX на RX. С точки зрения классического подключения это не совсем правильно, но на devo-m работает. В крайнем случае можно поменять местами RX-TX если не заработает. Оригинальный модем 3DR тут еще никто не подключал. Вполне достаточно вот такого. Кнопочка там же. Подробнее об этом в п7 вики.
Люди добрые, подскажите, что мне нужно купить, чтобы сделать ФПВ на своей 350про+дево10. В качестве камеры планирую использовать Гопро3силвер со штатным подвесом? Просьба написать просто перечень оптимального минимума. Много денег вбухивать нет возможности, но совсем дребедень покупать не буду, лучше подкоплю.