Walkera QR-X350 Pro

Вопрос к тем, кто перешел на APM. У меня теперь требуется гораздо больше газа для взлета (раньше взлетал на 55 по пульту, теперь по 80). В какую сторону смотреть? Контроллера или пульта? Что за параметр на это влияет? (да, я не держал в рукам ничего, кроме уг-коптера за копейки).
Для человека, кто написал в личку (не могу ответить, наверно, надо 30 дней с начала реги ждать).
img-fotki.yandex.ru/get/…/0_87bb4_c94ebe7d_orig
img-fotki.yandex.ru/get/…/0_87bb6_3ea92a1c_orig
Питание камеры и подвеса с правого нижнего угла, где 4 пары площадок.
img-fotki.yandex.ru/get/…/0_87bb7_c1d78635_orig
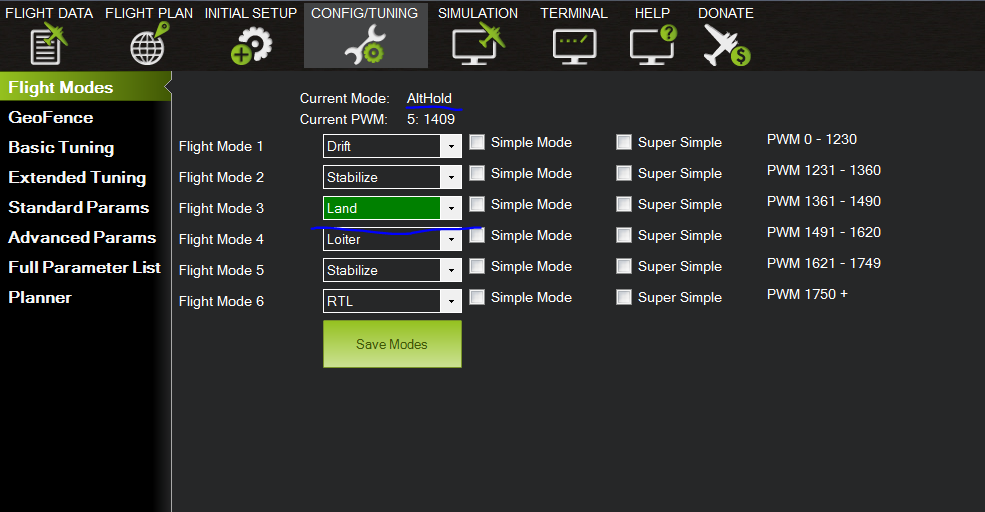
Скажите, я настроил f7 по инструкции
MIX0:FMODE0 (GEAR=-102) — режим 1 Stabilize Mode
MIX0:FMODE1 (GEAR=-58) — режим 2 (Настраивается по желанию в Mission Planner, например Altitude Hold. То же, что и stab, но с удержанием высоты по барометру. Замечательная вещь! Не зависит от GPS. Дрейфует только по горизонту. Управление поджато только по высоте).
MIX0:FMODE2 (GEAR=-25) — режим 3 (Настраивается по желанию в Mission Planner, например Drift Mode).
MIX1:FMODE(любое положение) (GEAR=8) — режим 4 Loiter Mode
MIX2:FMODE(любое положение) (GEAR=108) — режим 6 RTL Mode
однако у меня в первом случае gear равен -58 а во втором -102, хотя делал все по инструкции. и второе, что бы я не поставил на FMODE2 - всегда выбирается режим AltHold, хотя сохранен другой режим ( все через mission planner)
Вопрос к тем, кто перешел на APM. У меня теперь требуется гораздо больше газа для взлета (раньше взлетал на 55 по пульту, теперь по 80). В какую сторону смотреть? Контроллера или пульта? Что за параметр на это влияет? (да, я не держал в рукам ничего, кроме уг-коптера за копейки).
Читаем в библии:
translate.googleusercontent.com/translate_c?depth=…
Владислав, я Вам ответил.
Владислав, я Вам ответил.
Не все андроид планшеты и телефоны с OTG работают с 3dr модемами. Зависит от того, какие драйвера прошиты в ядре системы.
При наличии в планшете блютуз, есть изящное решение, подсоединение через мост блютуз- 3dr.
Не нужно проводов, модем можно разместить в более удобном для приема месте. У меня он установлен на мачте 4 метра высотой, простенькая самодельная антенна Яги на 433мгц позволяет поддерживать связь на расстоянии до 6км.
Всем привет!Walkera QR X350pro devo 10
столкнулся со следующей проблемой при тесте дома обнаружил что в режиме полета GPS двигатели запускаются при газе более 50% и потом выключаются на 28%, как это настроить?
p.s летал всего один раз в мануале
вот видео проблемы
Периодически в теме проскакивают вопросы про название разъемов в контроллере и датчиках на борту w350p. Вот картинка с объяснением отсюда.
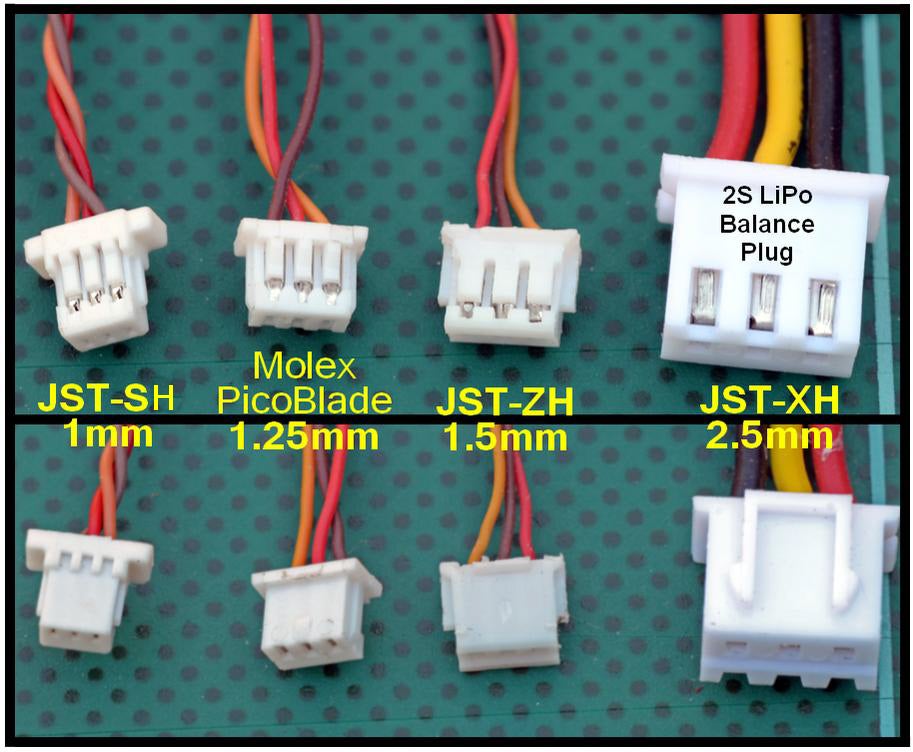
Как называются разъемы с защелками в самом контроллере devo-m так и не понятно. Решается покупкой готового зипа валкеры с разъемами на ебеях и в других магазинах.
двигатели запускаются при газе более 50% и потом выключаются на 28%
На 0:38 вы переключились в Loiter. Это автоматический режим удержания по компасу, акселерометру, альтиметру и GPS. Он подразумевает минимум 50% газа. Вот поэтому моторы и выключаются. А в самом начале все стартует правильно от ноля. Калибровки аппаратуры и режимов в МП посмотрите. Вначале калибруется аппа, потом каналы в Mission Planner. Стандартные разъемы питания лучше заменить на XT60.
Калибровки аппаратуры и режимов в МП посмотрите. Вначале калибруется аппа, потом каналы в Mission Planner.
где посмотреть примеры калибровки?
мой при подаче газа норовит, на левую сторону и чуть вперед, клюнуть подозреваю,что не откалиброван движок …
Калибровки аппаратуры и режимов в МП посмотрите. Вначале калибруется аппа, потом каналы в Mission Planner.
прочитал всю тему, но сленг для меня еще мало досягаем)))
если можно поподробнее про настройки
если можно поподробнее про настройки
- Введение в Ардукоптер. Но не все из этого букваря применимо для w350p: нет логов, нет программного файлсейва по тротлу, регули не калибруются, PosHold включается только с модема и пр…
- Вики Walkera QR X350 PRO.
- Вики Walkera QR X350 PRO. DEVO-M. Почти, но не совсем, ArduPilot.
Кнопочка спасибо справа.
Скажите, пожалуйста я правильно понимаю, что разъем на 3DR радио-модеме - CTS(INPUT) - надо подключить к Tx на плате DEVO-M, а RTS(output) к Rx на плате DEVO-M?
Спасибо
А на мой вопрос кто-то может ответить? Спасибо 😃
P.S. красота, блин надо разбираться с миссиями ))
В каком режиме это снято? В ручном? ФПВ есть?
нет логов, нет программного файлсейва по тротлу, регули не калибруются, PosHold включается только с модема и пр…
а, ну теперь все понятно)))
пошел читать
Скажите, пожалуйста я правильно понимаю, что разъем на 3DR радио-модеме - CTS(INPUT) - надо подключить к Tx на плате DEVO-M, а RTS(output) к Rx на плате DEVO-M? Спасибо
Именно так: TX на TX, а RX на RX. С точки зрения классического подключения это не совсем правильно, но на devo-m работает. В крайнем случае можно поменять местами RX-TX если не заработает. Оригинальный модем 3DR тут еще никто не подключал. Вполне достаточно вот такого. Кнопочка там же. Подробнее об этом в п7 вики.
Люди добрые, подскажите, что мне нужно купить, чтобы сделать ФПВ на своей 350про+дево10. В качестве камеры планирую использовать Гопро3силвер со штатным подвесом? Просьба написать просто перечень оптимального минимума. Много денег вбухивать нет возможности, но совсем дребедень покупать не буду, лучше подкоплю.
ФПВ на своей 350про+дево10. В качестве камеры планирую использовать Гопро3силвер со штатным подвесом
Видеолинк Boscam FPV 5.8G 600mW 32CH Wireless Transmitter Receiver TS832 RC832.
Антенны клевера Boscam SKY FPV 5.8GHz Petals Clover Mushrooms Antenna RP-SMA Male у них ножка хорошо гнется.
Очки Boscam GS920 640 x 480 2.4G 5.8G Wireless FPV AIO Goggle если вам подойдут по межзрачковому расстоянию. Обзор. Или шлем eYeBOX-FPV2 helmet.
Но это сугубо индивидуальный комплект. Лучше спросить в профильных ветках раздела Полеты по камере или тут.
Очки Boscam GS920 640 x 480 2.4G 5.8G Wireless FPV AIO Goggle
А почему очки, а не дисплей?
12тыщ за одни очки - круто выходит.
А почему очки, а не дисплей?
На дисплее вообще можно целую граундстайшен соорудить, но очки банально удобнее…

Скажите, я настроил f7 по инструкции
MIX0:FMODE0 (GEAR=-102) — режим 1 Stabilize Mode
MIX0:FMODE1 (GEAR=-58) — режим 2 (Настраивается по желанию в Mission Planner, например Altitude Hold. То же, что и stab, но с удержанием высоты по барометру. Замечательная вещь! Не зависит от GPS. Дрейфует только по горизонту. Управление поджато только по высоте).
MIX0:FMODE2 (GEAR=-25) — режим 3 (Настраивается по желанию в Mission Planner, например Drift Mode).
MIX1:FMODE(любое положение) (GEAR=8) — режим 4 Loiter Mode
MIX2:FMODE(любое положение) (GEAR=108) — режим 6 RTL Mode
однако у меня в первом случае gear равен -58 а во втором -102, хотя делал все по инструкции. и второе, что бы я не поставил на FMODE2 - всегда выбирается режим AltHold, хотя сохранен другой режим ( все через mission planner)
А всё то же самое только для Devo10 где посмотреть?
На дисплее вообще можно целую граундстайшен соорудить, но очки банально удобнее…
Кстати, а можно в качестве дисплея использовать ноутбук(тем самым сократить бюджет на покупку доп.оборудования)?
подсоединение через мост блютуз- 3dr.
Где можно подробнее почитать?
Просто прочитал что АРМ подключают по кабелю без 3DR к андроиду, попробовал сам, на планшете не пошло а телефон подхватил сразу.