Walkera QR-X350 Pro

Привет! Мне вот нужна помощь. Серьезно)
Вопрос в том, что я решил подрубить ОСД. Воспользовался информацией в инете, включая обобщенный материал товарища NetWood и Юлиана) Все сделал по схеме как тут за исключением того, что припаял еще и TX(по недоразумению). Все заработало, информация на экран пошла. Но при попытке подлетнуть, вышло так, что коптер просто завалился на бок. Отрубил все, включая камеру и ОСД, но ничего. Калибровка акселерометра тоже не дала результат. В миссион планере он ровно по горизонту стоит, все норм. Но на деле происходит то, что показано на видео. Помогите, что случилось? Где искать подвох?
А вот как я узнал об этом
После месячной лёжки в коробке собрал свою Валю, но наблюдаю странное поведение - перестали нормально армиться движки.
На F7 замечено, что уплывает ноль на резисторах стиков от долгого лежания, соответственно и расходы меняются тоже. Попробуйте перекалибровать аппаратуру и посмотреть соответствие на закладке каналов в МП.
Но при попытке подлетнуть, вышло так, что коптер просто завалился на бок. Отрубил все, включая камеру и ОСД, но ничего. Калибровка акселерометра тоже не дала результат.
Настройка рамы в МП точно X? Бывает, что при калибровке акселя случайно становится +.
Господа, такая просьба,мог бы кто-нибудь из знатоков составить краткую и понятную инструкцию/список мер для того чтобы максимально защитить Валкеру от “флайэвэев” (самопроизвольных улетов). Я имею в виду настройки в МП и в пульте,где и как летать - не летать и т.д. (желательно со скринами из МП) Может уже где-то это все описано в одном месте?
Заранее благодарен. Моя Валкера и Дэво-10 еще только едут ко мне,но думаю что уже сегодня это многим могло бы помочь.
Я потихоньку сам начну отвечать на свой комментарий)
На предыдущих страницах встретил подобные строки (увы,не помню кто писал),привожу данную копипасту:
- Так всё есть на форуме, я своего ничего не изобрёл. Не стоит копировать настройки - нужно чётко понимать что они значат. Единственное, я включил фэйлсэйф и на пульте и в мозгах, что здешние гуру не рекомендовали. Включил на пульте - это значит ни одного параметра не оставил в холде, а все загнал в значения при которых валька обязана лететь домой. Тяга - поскольку она в пульте регулируется от -125 до +125 была установлена в “0”. Надеюсь, что это соответствует 50-ти процентам на стике. В мозгах есть параметр - что делать при потере сигнала от наземной станции (ground station) - разумеется RTL, т.е. “возврат домой”. По-умолчанию там стоит “ничего не делать” - яркий образчик китайского коварства! Ну и самое главное не забыть на пульте канал GEAR поставить в +100 что эквивалентно переключению тумблера в положение “2” - возврат домой. Если валька сигнал от пульта уже потеряла, кто же её переключит в возврат домой, как не эта настройка. Иначе - улетит!
Скорость возврата домой, вместо 300 установил аж 1000! Очень хорошо! Смотреть, как валька еле тащится к дому - это серьёзный стресс, так что это значение весьма полезное. Подъём при возврате домой установил вместо 1500 - 1000 т.е. 10 метров (там в сантиметрах значение) но это каждому своё нужно ставить - если дома многоэтажные облетать - и 50 метров будет маловато, а если кустики - 10 метров самое оно. Кстати, скоростной возврат домой, думаю повысит вероятность возврата против ветра, если ветер приличный. И очень хороший совет - если присутствует ветер - отправлять вальку против ветра - существенно легче вернуть домой!
Стоит ли к этому относится как к своеобразной предполетной подготовке и хоть какой-то страховке от улётов?
p.s. Читаю форум,с одной стороны понимаю - закон всех форумов: приходят писать как правило те,у которых что-то не так,а не те у которых всё штатно работает. Но с другой стороны,после всех описаных улётов и крашей уже начинаю задумываться,об альтернативных вариантах в случае даже небольшого краша… Кстати,возможно ли перенести всю начинку от Валкеры,скажем на раму TBS Discovery или ходя бы подключить стандартный дэвовский приемник к Naza-M (чтобы биндить с ней аппу Дэво-10)? (ссори за оффтоп)
Настройка рамы в МП точно X? Бывает, что при калибровке акселя случайно становится +.
Настройка рамы Х! Дело в том, что заваливаться он начал до калибровки. Голову ломаю, где искать…
А что будет если ТХ подрубить на плату контроллера, не может он сбить ориентацию в пространстве? В МП показания YAW прыгают.
Дело в том, что заваливаться он начал до калибровки.
Джампера моторов точно правильно в контроллер поставлены?
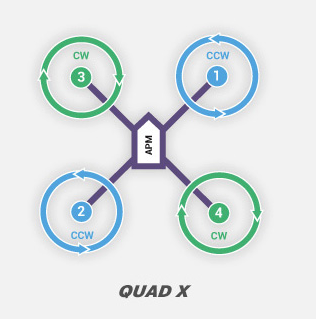
! Спасибо за схему. На видео первом я показал расположение моторов в мозгах. И очевидно, что облётывал я с неправильным расположением. 2 и 3 поменял местами. Калибровал уже с этим косяком, поэтому когда переставил их как надо, это не помогло. Сейчас протестирую с правильным расположением после калибровки. Отпишусь.
ЗЫ Сам дурак! Перепутал 2 и З выходы на регуляторы при сборке. Откалибровал в таком виде) сейчас все исправил и откалибровал. Зашел в спальню и спрятавшись за сушкой для белья запустил коптер в небо))) Повисел и от радости станцевал)) Спасибо Net Wood.
Компас перестал входить в режим калибровки - сведение стиков приводит к миганию левого фонаря - пока держишь, мигает, отпускаешь - гаснет.
Калибровка в МП что-то как-то мне не даётся, последние 2 точки никак не закрою - калибровка не завершается. Может, с компасом что-то не то?
Компас перестал входить в режим калибровки
все-таки проверь калибровку стиков
Ребят, стоит сейчас прошивка 1.1. Стоит ее менять на другие? Помнится где то писали, что потом недоступны какие то моменты. Еще вопрос. При уменьшении газа меньше 20% отключаются моторы. В новой проше также? Кто как решил данную проблему у себя на НЕРОДНЫХ пультах и для чего это вообще реализовано в прошивке? СПС. Прошу отписать.
Если всё устраивает, то не стоит. У меня тоже 1,1 прошивка, полностью устраивает. С болтанкой в GPS разберусь только.
Офф.
Купил я тараниса, теперь буду Владислава мучать вопросами 😃
Если всё устраивает, то не стоит. У меня тоже 1,1 прошивка, полностью устраивает. С болтанкой в GPS разберусь только. Офф. Купил я тараниса, теперь буду Владислава мучать вопросами
Олег, по этому вопросу.
При уменьшении газа меньше 20% отключаются моторы. В новой проше также? Кто как решил данную проблему у себя на НЕРОДНЫХ пультах и для чего это вообще реализовано в прошивке? СПС. Прошу отписать.
В новой проше также?
В прошивке 1,7 не отключаются. В 1,1 - да. Но в ручном режиме, в лоитере не отключаются даже при 0%.
Парни после калибровки и перепрошивки перестал работать режим лоитер, не подскажите где копать. Как его правильно настроить в аппе или в МП, и как это сделать есть какая нибудь информация по этому поводу-“настройка полетных режимов”
перестал работать режим лоитер
Это как? В МП когда включаете - оно включается?
здравствуйте, мне пришел родной движок но на нем цвета проводов красный черный синий а который был изначально красный желтый зеленый каккой к какому цвету относится?
каккой к какому цвету относится
На этой же странице выше я приложил фоточку Вали в разборе: слева новый мотор, остальные - старые.
Чёрный == жёлтый; синий == зелёный.
Ребят вопрос. Первый раз подключил коптер, вынес на застекленный балкон. Еле написал GPS fix. См фото. Я правильно понимаю, что это ПРИВЯЗКА к местности и в случае RTL будет возврат домой. Еще не показывает в МП кол-во спутников(на Вальке светодиод не мигает). Так должно быть или Валька с МП по этому параметру не дружат? А черные, красные и оранжевые линии это что?
Еще не показывает в МП кол-во спутников(на Вальке светодиод не мигает).
Пульт включили? Моргает только с включенным пультом.
Я правильно понимаю, что это ПРИВЯЗКА к местности и в случае RTL будет возврат домой.
Это значит, что модуль подключился к GPS, возврат будет на те координаты, которые он определил. Если верно, то домой, если неверно, то в Китай. 😃
Еще не показывает в МП кол-во спутников
На скрине МП видно 4 спутника.
А черные, красные и оранжевые линии это что?
В МП есть расшифровка (на английском правда).
Пульт включили? Моргает только с включенным пультом.
пульт включен.
Это значит, что модуль подключился к GPS, возврат будет на те координаты, которые он определил. Если верно, то домой, если неверно, то в Китай.
таки как понять? Если квадр правильно на карте находится - значит все ОК, домой?
На скрине МП видно 4 спутника.
Где? я думал в верхнем квадратике на карте, там 0. или где?
Где?
Олег, спс. Подскажи, как на неродном приемнике FAILSAVE настроить. У меня Таранис, приемник D8r. Делал так. Ставил в режим RTL и нажимал кнопку на приемнике для сохранения FAILSAVE Ставлю на квадре СТАбилизация, выключаю пульт и не переключается он в RTL/ Что то не так сделал?