Walkera QR-X350 Pro

Вот это я понимаю люди работают. Вчера заказал 21-00. Сегодня в 13-00 уже shipped.
Ну раз такое дело, то, если можно, пошагово что делать перед первым запуском. А то лень читать мануал на англ. 😃
- перед КАЖДЫМ стартом на новом месте- проводить калибровку датчиков положения
(об этом уже писали) - Ни в коем случае не делать резких движений стиками. 😃
Ну раз такое дело, то, если можно, пошагово что делать перед первым запуском. А то лень читать мануал на англ.
Лень, это главная причина, по которой коптеры в Китай улетают.
Лень, это главная причина, по которой коптеры в Китай улетают.
Не- на них планета охотится, и поэтому кидается почти сразу. Не улетит.
ЗЫ не удержался, извините
Лень, это главная причина, по которой коптеры в Китай улетают.
С этим утверждение согласен на 100%!
хотябы знать надо вот этоwww.a123systems.ru/index.php?showtopic=4211
на них планета охотится, и поэтому кидается почти сразу. Не улетит.
Уж лучше пусть об планету чем на родину улетит 😃
Всем привет! Ребята, с такой проблемой столкнулся, пытаюсь откалибровать Валкеру, выставляю стиками комбинацию нужную, светодиод начинает мигать, но после того как я отпускаю стики он гаснет. А как я понял из многочисленных туториалов, он должен мигать 30 секунд, в течение которых нужно Валкеру кувыркать. Почему оно может быть так? 😃
Официальный релиз прошивки v1.1
www.walkera.com/en/progoods.php?id=2578&type=fly
Желающим в перспективе настраивать коптер в Missionplanner а также летать по точкам, шить это обновление не рекомендую.
шить это обновление не рекомендую.
Аргументируйте пожалуйста.
пользоваться сторонними программами…
Аргументируйте пожалуйста.
Я засветил недокументированные свойства Прошки и на международном модельном форуме, многие буржуи уже попробовали и радуются. Но один товарищ после наката обновления от Валкеры и последующего подключения к МиссионПланнер затер все настройки в ЕЕПРОМ. Не исключаю, что он просто попробовал настроить контроллер через Визард, но возможно, что причина именно в обновлении. Потому и не рекомендую. Кто хочет просто пользовать коптер в стоковых функциях, чтож, пусть шьет. Обещают лучшее поведение в Loiter Mode, но он и так в нем ИМХО прекрасно себя ведет.
Кстати, пострадавший товарищ по моему совету через SPI прошил контроллер стандартным Ардукоптер-ом и продолжает летать и радоваться.😁

Для тех, кто решил попробовать обновление V1.1, тут лежит откат на V1.0.
Автономная миссия на QR-X350 Pro. Автоматический взлет, 70 точек маршрута, автоматическая посадка. Длина маршрута 2,18км. Видео поганенькое, камера жестко закреплена на коптере, да и Ютуб подпортил. На 58 точке, 4 минута видео, пролет над гнездом с аистом.

Ты совсем не трогал управление? Просто иногда костер резко поворачивается и интересно кто это делает?
Когда запишешь видео подготовки к такому полету, хотя бы из 3 точек?
Страшно сделать что нибудь нето и прощай валька…
Ты совсем не трогал управление? Просто иногда костер резко поворачивается и интересно кто это делает?
Я только активировал режим и больше не трогал ничего. Коптер резко поворачивает по руддеру при пролете точек, на которых он меняет курс.
Когда запишешь видео подготовки к такому полету, хотя бы из 3 точек?
Вот пытаюсь это сделать сейчас.
Страшно сделать что нибудь нето и прощай валька…
В любой момент можно перейти в Stabilize Mode и прервать миссию. Или активировать RTL и вернуться домой.
Ну ты дал Влад!! !Уважуха! Жаль, что только танков хунты не видать только(шутка!))
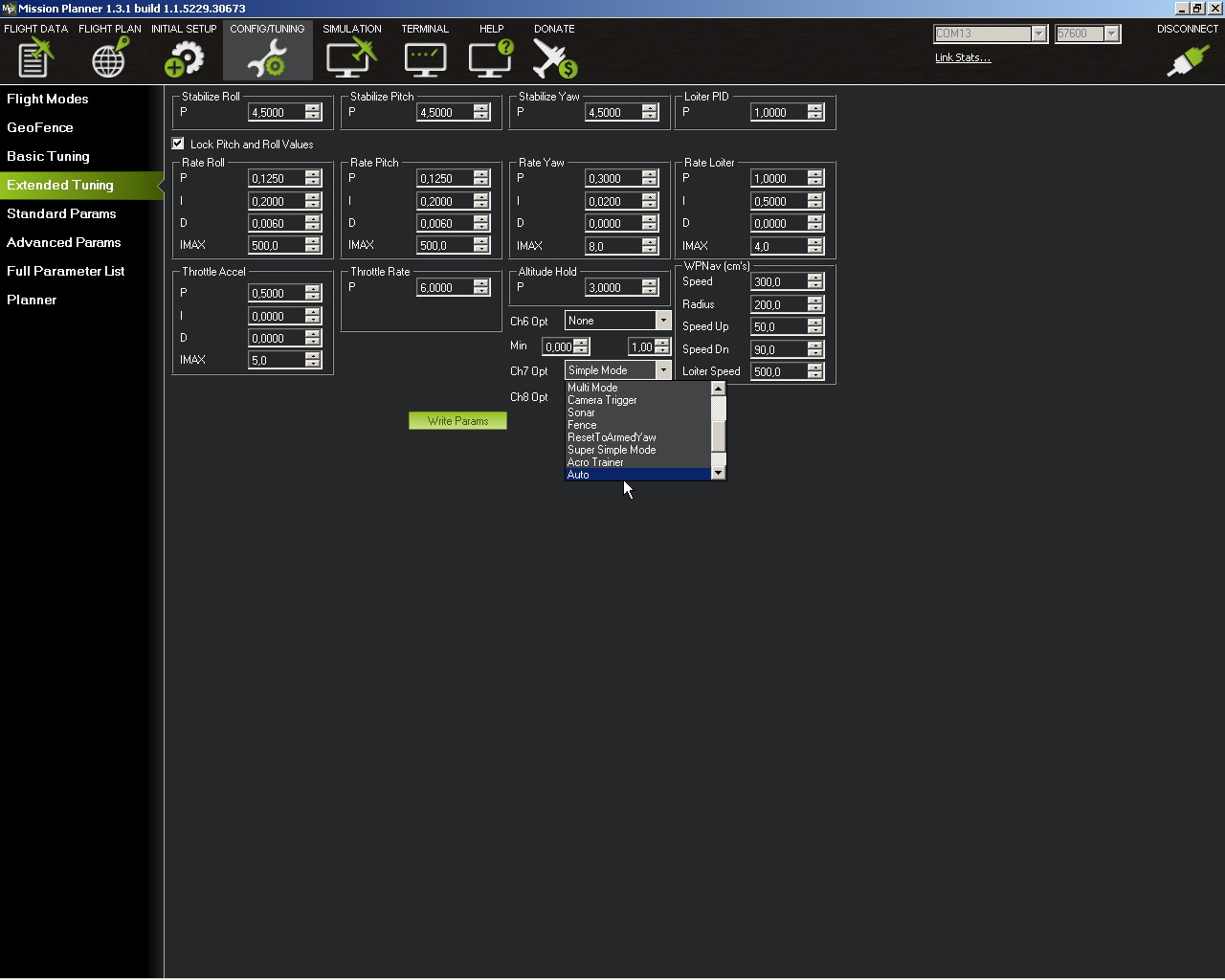
Описываю, как планировать миссию. Коннектимся шнурком к компьютеру(аппаратура включена, батарея в коптере не нужна, он будет питать мозги от ЮСБ порта), открываем МиссионПланнер, выбираем вверху справа нужный порт(где Atmega2560), выбираем скорость 57600, коннектимся, ждем соединения, вилочка на кнопке коннекта позеленеет.
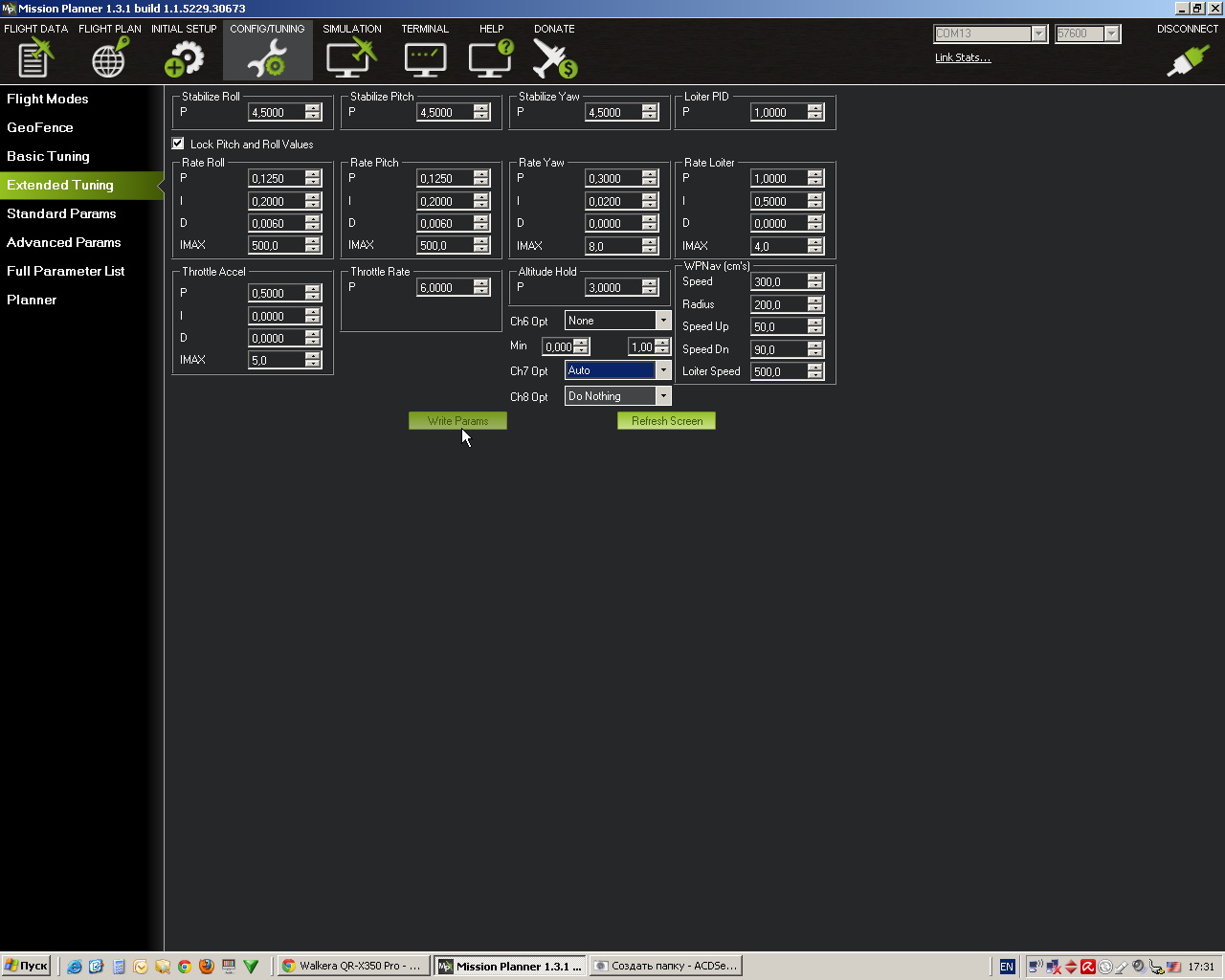
Теперь нужно нам перенастроить тумблер IOC на седьмом канале (этой функцией пожертвуем) на Avto Mode. После переназначения тумблера, нажимаем Write Params для сохранения изменений.
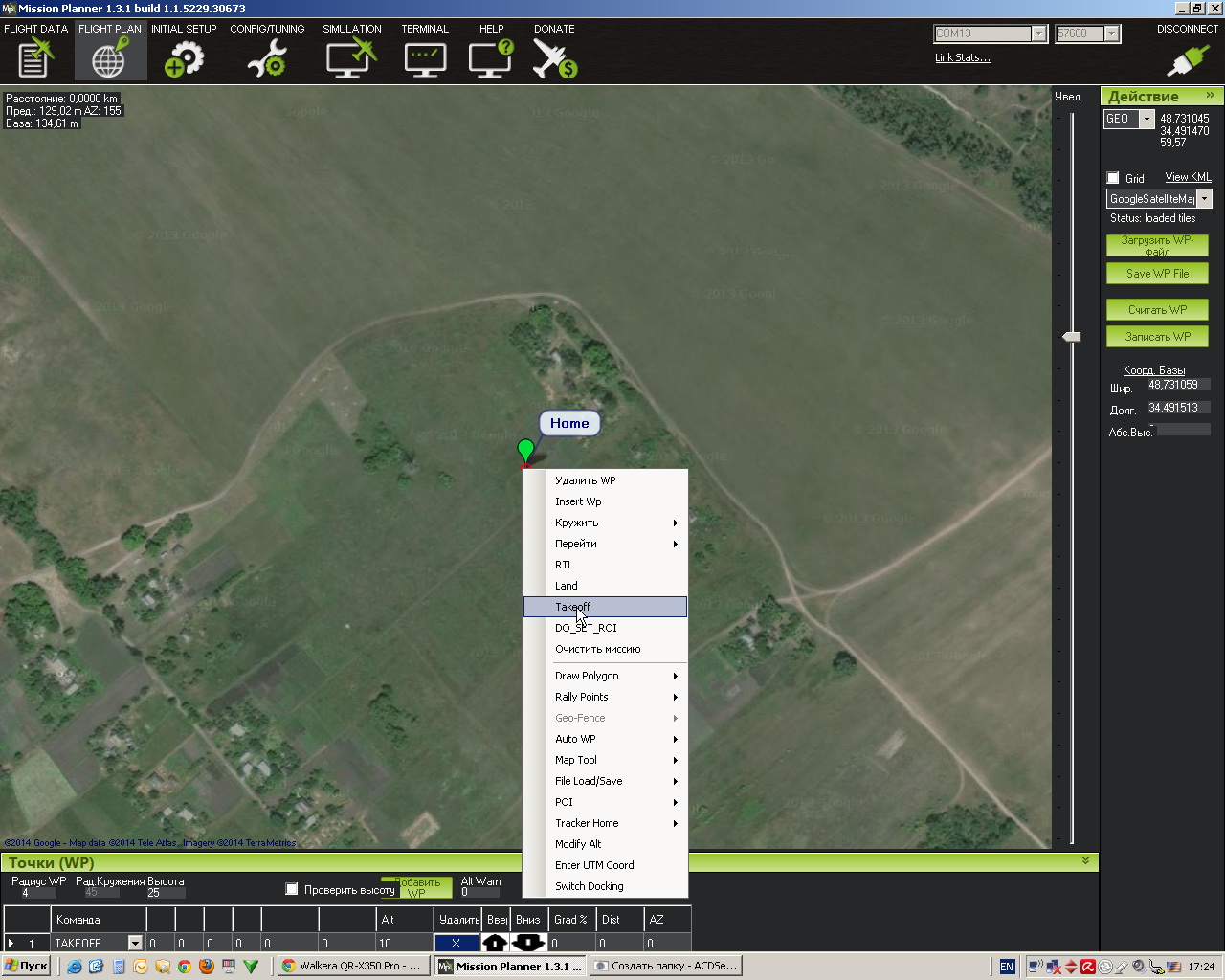
Переходим на закладку планирования миссии, выбираем точку старта, и задаем ее как стартовую Takeoff.
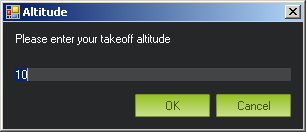
Выбираем в выпавшем окне, на какую высоту подняться после старта.
Расставляем точки маршрута, в примере я выбрал диаметр точки 4 метра и высоту точки 25 метров.

Ставим командную точку возвращения домой RTL.
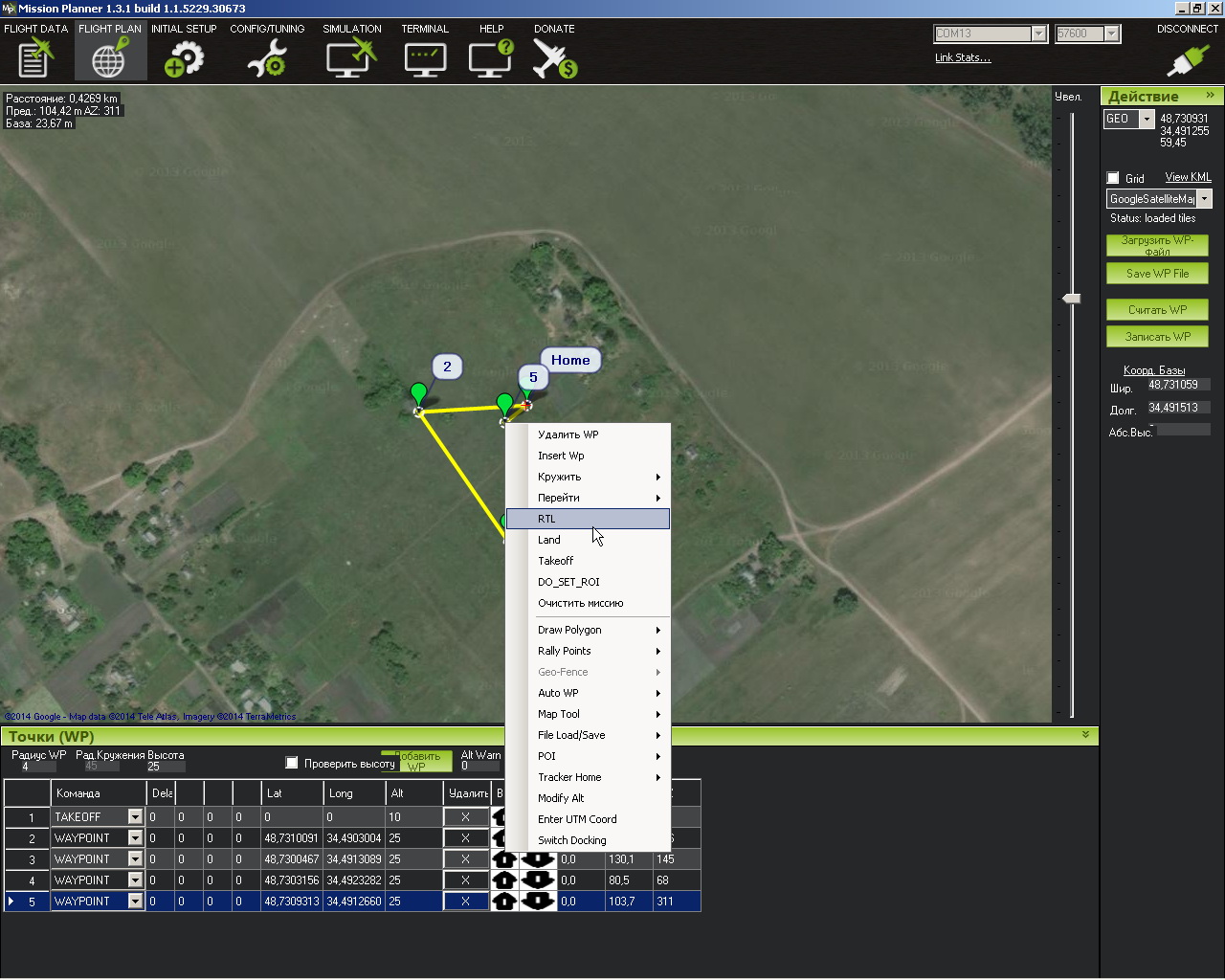
Записываем миссию в полетный контроллер, нажав кнопку “Записать WP”.
Дисконнектимся, нажав вверху справа на кнопку с вилочкой.
Отсоединяем шнурок, выключаем аппаратуру.
Теперь, как летать миссию. Приходим на точку старта, включаем аппу, подсоединяем батарейку к коптеру, и ни в коем случае не разблокируем моторы, пока не получим надежную фиксацию спутников, не менее двух миганий правого светодиода. После чего разблокируем двигатели, переключаем тумблер, тот что был раньше на IOC и поднимаем стик газа до середины. Коптер сам взлетит(его может чуть колбаснуть после отрыва, не страшно), поднимется на заданные 10 метров высоты и пойдет по маршруту. После просадки стик газа вниз и отключить тумблер автомиссии. Заблокировать двигатели. При полете по маршруту, всегда можно вернуть управление, отключив тумблер Avto .
____________________________________________________________________________________________________________________________________________________________________________________________________
Далее расскажу, как настроить различные режимы полета.
При полете по маршруту, всегда можно вернуть управление, отключив тумблер Avto .
А что будет, если связь с пультом управления пропадет?
А что будет если коптер поставить не в точку старта, которая задана в МиссионПланнер?
Если приемник и аппаратура Валкера, сработает файлсейв приемника и коптер полетит домой. Если аппа другого производителя, можно настроить программный файлсейв Ардупилота, и настроить, либо возврат домой, либо продолжение миссии. Она не имеет координат.
А что будет если коптер поставить не в точку старта, которая задана в МиссионПланнер?
Точка старта является командной, а не координатной точкой, она лишь дает команду взлететь и набрать заданную высоту.