Walkera QR-X350 Pro

Ребята подскажите, установил телеметрию в Tower (DroidPlanner 3) вся информация отражается на планшете всё видно конектится но режимы от планшета не включаются очевидно что то в настройках. Заранее спасибо.
установил телеметрию в Tower (DroidPlanner 3) вся информация отражается на планшете всё видно конектится но режимы от планшета не включаются
А события арминг/дизарминг отображаются? Планшет их проговаривает? Вообще странно. Это должно работать без дополнительных настроек как для OSD. Связь по модему с обычным компьютером и МП есть?
у меня поменян GPS модуль на mtk3333, может в нем дело (ошибок касаемо GPS в MP не встречал вроде)
при выводе данных в формате нмеа инерциалка по широте и долготе работает не нормально изза баги в коде ардукоптера
как отключить инерциалку и настроить плавнее лоитер
вот тут описание эксперимента. поскольку у дево-м прошивка ардукоптер - должно сработать forum.apmcopter.ru/threads/…/page-7#post-2458
События арминг/дизарминг отображаются. Планшет их проговаривает.OSD работает нормально на пульту тоже всё видно.
А события арминг/дизарминг отображаются? Планшет их проговаривает? Вообще странно. Это должно работать без дополнительных настроек как для OSD. Связь по модему с обычным компьютером и МП есть?
События арминг/дизарминг отображаются. Планшет их проговаривает.OSD работает нормально на пульту тоже всё видно.Связь по модему тоже есть.Попробую сделать настройки как у NARAJANA
Попробуйте ahrs_gps_gain=0. По умолчанию в параметрах стоит 1.
не помогло, какие то у меня глюки, сделал запись, походу какие то проблемы с GPS, MT3333 который стоит, я завтра родной поставлю попробую с ним, так конечно не охота, хороший этот MT3333, но как его диагностировать и понять в чем проблема! вот задача. прикрепил логи, может что станет понятно кому, посмотрите, я так ни каких глюкв не нашел кроме какой странной надписи что сдох GPS (это может опять MP врет), но параметры то все в норме! напоминаю что при полете домой кружит над домом, резкие развороты повороты делает и т.п. иногда приземляется, но редко. да и еще DisttoHome врет очень часто, не понимаю почему, то ли это MP виноват, то ли опять же GPS, но в minimosd при этом правильно показывает расстояние до дома, так что скорее всего это MP глючит, завтра с родным сравнивать буду.
вопрос что означают циферки чуть ниже режима полета написано RTLи ниже 15>0 и меняются цифры, что это?
Так, вношу в сообщество еще немного полезной инфы:
аккумулятор на 6600 с DX.COM оказался не совсем уж идеальным. Во первых - с трудом влезает в прошку, но это ладно. Крышку тоже я терплю и открытую. Беда в том, что по току он тухловат, после остановки поднимается почти на вольт напряжение О_О. Сегодня “полетал” с ним в очередной раз, словил FS по батарее, хотя было 11.6 по телеметрии. Просто газу дал…
Батарея multistar от turnigy оказалась с той же проблемой примерно, сейчас проверяю и смотрю, что и как, тесты продолжу и отпишу.
Лучше всех сейчас себя показывает родная батарейка, которая все это время работает как часы и даже ток выдает нужный.
Вопрос к знатокам: лучше родных батареек реально нет ничего? Или есть какие-то секретные, но на вики не выложенные?
Владимиру на днях прошку собирали/приводили в чувства. Всем, кто гоняется за высокими номерами в прошивках посвящается: после отличного полета поймали глюк GPS, выражавшийся в скачущем hdop туда-сюда от 2-3 до 100. В режимах стабилизации прошку носило вокруг как щепку в море (был практически штиль). Вылечилось, судя по всему, прошивкой на 1.0, была 1.7. Других причин неадекватного поведения не выявлено. Осторожнее, короче, если хочется старших прошивок…
Камрады. Подскажите размеры штатных пропеллеров прошки. хочу подобрать что то из APS. Ну и до кучи подскажите пожалуйста допустимые размеры от штатных плюс минус чтоб не перегрузить движки и регули.Спасибо
Точно никто не скажет. Я сравнивал с имеющимися - близко к 9х7.5
не помогло, какие то у меня глюки,
Почитайте в посте #8620 ссылку по поводу вибрации. Совершенно неожиданное и простое решение — стянуть лучи попарно для устранения резонанса. Например, можно куском проволоки за крайние винтики в корпусе или смастерить подкладку под моторы и подтягивать через отверстия в подкладке… Кстати, на Прошке начинается проявляться со временем (корпус-то хиловат) и уже задавали вопросы про колбасню в лойере. Кроме того, проверяйте затяжку винтов на моторах. Они банально откручиваются со временем. Надо сажать их на фиксатор резьбы, но осторожно, так как он разъедает пластик корпуса. Можно попробовать еще подложить под них кусочек резины для снижения вибраций. Вот реальный пример rcopen.com/forum/f134/topic224135/1884.
Осторожнее, короче, если хочется старших прошивок…
1.0 — это наше все. Летает и не кашляет. На старшие даже не пробовал.
что то я как то упустил пост от алексея, почитаю, GPS его кстати )
Вопрос к знатокам: лучше родных батареек реально нет ничего? Или есть какие-то секретные, но на вики не выложенные?
я пробовал 20С 3S 2100мАч/11,1В (SY21003S20) (других по близости не было, брал у себя в хлебном, написано планете-хобби) на одной летает 11-12 минут без камеры, нв двух (две по размерам как родная) теже 25 минут -как родная. садил по индикатору как начинал пищать. я настроил все на 10.5 вольт
вот еще пара постов - очень похоже описание вашей ситуации rcopen.com/forum/f123/topic233564/19586
разбор причины в исходном коде rcopen.com/forum/f123/topic233564/19660
лечение вибраций - растяжки на лучи - без вибраций инерциалка будет поспокойнее
чтобы вырубить инерциалку по широте и долготе и посмотреть мух отдельно от котлет inav_tc_xy= 0,5
как немножко ослабить пиды лоитера чтоб сильно не дергало без инерциалки P с 1.0 до 0.2 I с 0.6 до 0.2 а IMAX с 100 до 50
просто понять есть ли бага в коде дево-м - проверить в логе жпс столбцы даты и времени если нулевые - то бага инерциалка не работает
бага кода ардукоптера не только с моими жпс проявляется - со всеми модулями работающими в стандарте nmea втч юблоксами у которых вывод настроен на нмеа
по защите жпс модуля - оградите его снизу экраном из фольги от остальной электроники, чуть выше было.
чтобы не жаловался на плохое здоровье после резких маневров - увеличте gps_glitch_radius раз в 5
валькера использовала открытый код а исходники их прошивки закрыты?
если есть исходники я бы попробовал поправить и скомпилировать прошивку с фиксом
после фикса в ардукоптере андрей сивохин даже утра не стал ждать - полетал
(огромное ему за это спасибо)
правда видео совсем минутка но он минут десять так висел
(была проблема загрузить все видео на ютуб)
а тут показательно то что жпс смещен назад.
при этом видно что при вращении по курсу аппарат дердит точку относительно точки установки жпс
причем считается что удерживать позицию при быстрых поворотах по яву гораздо сложнее изза запаздывания компаса и команд навигации
Добрый день, может не в той теме,но у меня первая walkera, как ее подключить и каким шнуром к компу, я уже спрашивал, но так и не нашел.
Добрый день, может не в той теме,но у меня первая walkera, как ее подключить и каким шнуром к компу, я уже спрашивал, но так и не нашел.
Самым обычным шнурком от мобилы usb to micro usb
Нету у меня такого выхода, есть только проводок с разьемом как для сервы!
Вот такой выход только есть.
А события арминг/дизарминг отображаются? Планшет их проговаривает? Вообще странно. Это должно работать без дополнительных настроек как для OSD. Связь по модему с обычным компьютером и МП есть?
Перенастроил нечего не помогло, арминг/дизарминг проходит только через пульт, планшет их проговаривает,режимы по прежнему не включаются.Режимы которые включает пульт тоже показывает.
Нету у меня такого выхода, есть только проводок с разьемом как для сервы!
А где вы ее покупали? Какой-то странный длинный контроллер. Вот так выглядит стандартный. И справа от приемника должна быть плата с micro-usb разъемом. За вашей рукой его не видно.
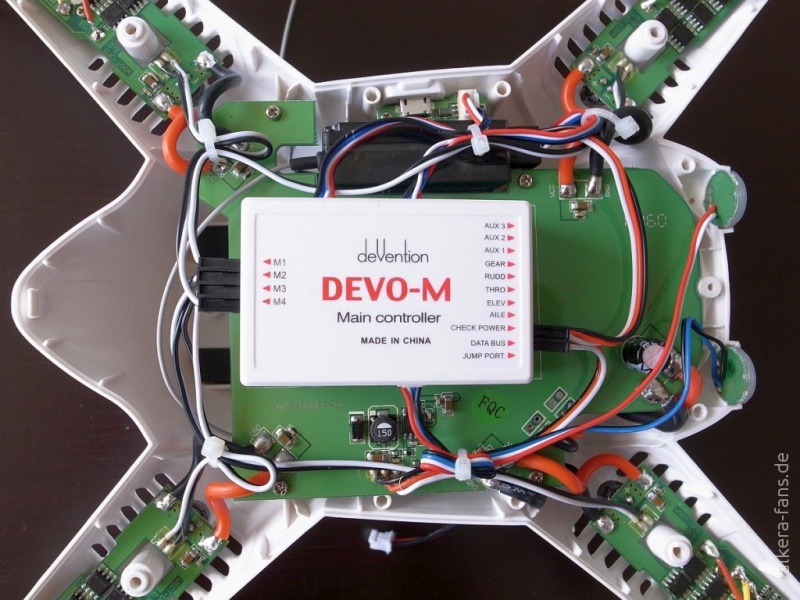
Похоже, что у вас обычная версия walkera 350. Не про. Это в другую ветку 😃.

нашел описание что такое 2>0 в MP
А где вы ее покупали? Какой-то странный длинный контроллер. Вот так выглядит стандартный. И справа от приемника должна быть плата с micro-usb разъемом. За вашей рукой его не видно.
Это первая walkera
Это первая walkera
Так там, вроде, не ardupilot, а клон multiwii или чего-то еще… Тут другой случай, другие беды… Другие пиды…
но у меня первая walkera
Вам в тему 350 без про; это совсем другой аппарат, другие мозги. Ровно так же Walkera 350 Premium - другой аппарат, несмотря на те же цифири.
по экспериментировал я сегодня с вибрациями, сравнивал показания акселерометра по вибрации в tlog, что я пробовал:
- седлал уплотнители между двигателем и креплением
- стягивал лучи
помогает немного от вибрации судя по показаниям, уплотнители, стягивание лучей на нашем корпусе это полная шляпа, слишком корпус хрупкий, все разваливается.
пробовал поиграться с пидами и inav_tc_xy, работает, когда inav_tc_xy ставишь 1,7 хотя бы заметно лучше все начинает работать, минус, как и говорили начинает сильно его дергать, правишь пиды, у меня стояли 0,14, я ставить пробовал 0,13 0,125, ну не то это все, на высоте при ветре не летит он домой, не справится ему, я конечно завтра еще по экспериментирую, но правка пидов мне совсем не нравится пока что.
минус из правки inav_tc_xy, что когда коптер садиться на землю, а настройки у него высоты как правило +3 метра для перестраховки, и вот когда он уже сел, он по земле начинает ездить если его не выключить, ну сегодня на бок и завалился, минус два винта ( так что минусы в уменьшении inav_tc_xy тоже есть
сегодня узнал что то новое , сработал failsave на батарею, при включенном RTL, он перешел в режим LAND и ни куда не переключился больше, управлять давал себе, но набрать высоту и переключить режим не дал. хотя в настройках в коптере стоит RTL при FS на батарею. поковырял настройки возможно виновник FS_THR_ENABLE, стояло 2, поставил 1, завтра проверю. напомню что приемник стоит не родной, а D8R-XP
P.S. я реально задумался что то уже прошить devo наш APM прошивкой, вроде прошивали же